Robi 로봇 제작 - 26권 (다리 조립)
 |
 |
이번은 26권!
 |
 |
 |
첫번째 사진 부터!
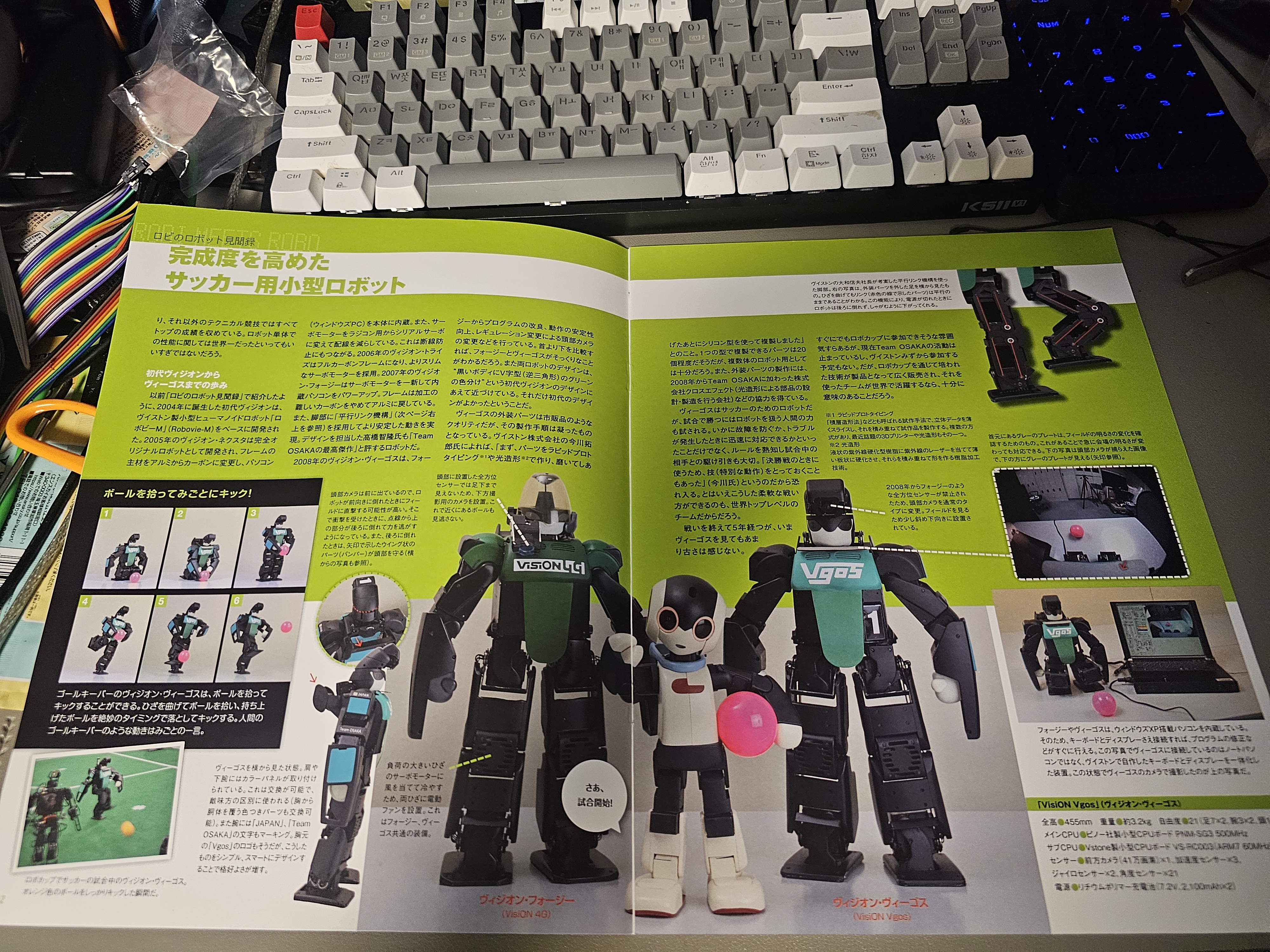
보면.. 축구를 위한 로봇을 설명하는 것 같다. Team OSAKA가 만든 축구 대회를 위한 로봇을 설명하는 것 같은데.. 완전히 축구에 맞춰진 로봇 같다.. 다른 내용은 번역하기가 어려워서 잘은 모르겠지만.. 신기한 건.. 일단 로봇 안에 Windows XP가 설치가 되어있고.. 그걸 컴퓨터에 연결하는 방식인 것 같다.. 진짜 신기한건.. 분명 저게 라즈베리파이 보다 훨씬 않좋을텐데.. 도데체 어떻게 그걸 프로그래밍 하고 구현하고.. 할 수 있었던건지.. 지금 생각해도 어떻게 한걸까.. 궁금해진다..
그리고 제일 좋은 내용이라면.. 오른쪽 중간에 있는 사진이다.. 일본어라 잘은 모르겠다만.. 흰색 플레이트로 빛이 밝아져도 물체를 인식할 수 있도록 되어있다고 하는 것 같은데.. 제대로 번역하지는 못해서 확실하지는 않지만.. 내 생각엔 아마도 기존 환경의 흰색 플레이트의 색 정보나 밝기 등을 저장하고.. 이후에 대회에서 갑자기 빛이 밝아지거나 어두워져도 자동으로 기존 환경의 흰색 플레이트와 차이를 알아내서 보정한다는 내용 같다.. (맞는진 모름..)
근데 그런 방법이라면.. 확실히 좋을 것 같긴 하다.. 나도 로봇 대회에 가끔 나가보았지만.. 빛 때문에 항상 대회에서 실패했을 때가 많았는데.. 저거라면.. 진짜 좋을지도..? (근데 내가 실패한 대회는 IR 센서를 사용하는거라.. 하하..)
책에는 나왔는지는 모르겠지만.. 저것도 아마 공 인식을 위해 HSV를 사용하지 않을까 싶다.. 예전에 Darwin OP의 빨간색 공 인식이 어떻게 이루어지는지를 찾아보다가 HSV를 사용한다고 보고 그 이후부터 대부분 인식에서 나도 HSV를 사용하는데.. HSV는 진짜 만능인 것 같다..
암튼.. 두번째 사진!
두번째 사진에서는.. Robi를 만든 다카하시 토모타카가 만들었다는 ロピッド를 설명하는 것 같다.. 인터뷰인 듯 한데..
암튼.. Robi 까지는 귀여운데.. 저 로봇은 좀.. 무섭게 생겼다.. (왠만하면 메로로봇도 귀엽게 생겼다고 생각하는데.. 저건 좀..)
https://youtu.be/tjyK4zR2zog?si=evxnFACu5VhPzG7j
암튼 이게 작동영상인데.. 왜 모든 저 로봇의 영상에는 화이트 노이즈 같은게 나오는진 모르겠다만.. (아마도 로봇의 소리일 가능성이 높은 듯함..) 저 로봇을 보면 굉장히 지금도 구현하기 어려운 빠르게 뛰는 것과.. 점프를 하는 것.. 등이 구현되어있다.. 도데체 어떻게 한거지..? 이 뛰는거가.. 타이밍벨트로 되어있다고 하는 것 같은데.. 그래도 잘 감이 안온다..
점프할 때 엄청 빠른 속도로 모터를 감았다 풀어야 할텐데.. 그게 저 작은 로봇에서도 쉬운건가..? 라는 생각이 든다.. 가능은 하겠지만.. 잘 감이 안온다.. 그리고 저 로봇의 구조가 뭔지는 잘은 모르겠지만.. 오른쪽 상단에 있는 사진을 보고 갑자기 생각난건.. 다른 휴머노이드 로봇들은 팔꿈치나 무릎에 왜 서보모터를 하나 더 둔거지 하는 생각이 들었다. 저 사진을 보고 생각해보면 어차피 꺽이는건 똑같은데 모터를 2개 더 써가면서 까지 해야할 필요가 있을까? 라는 생각이 들었다. 뭐 물론 벨트로 하게 되면 벨트 마모나 구현 매커니즘이 훨씬 어려워질 것 같긴 하지만.. 잘 만든다면.. 모터 2개가 빠져서 오히려 더 가벼울 것이고.. 더 좋을 수도 있을 것 같다라는 느낌이 들긴 하는데.. 뭐.. 중간에 서보모터를 다는 이유는 있을테니.. 뭐 넘어가는걸로..
근데 저 로봇을 보면서 생각난게.. 예전에 어릴 때 부모님이 사주셨던.. 백덤블링 하는 강아지 로봇이 생각나는데.. 파란색으로 된 미래 지향적인 디자인의 로봇 강아지.. 방식은 다르겠지만.. 그것도 신기하다.. 사진을 찾아볼려 했는데.. 나오진 않아서 아쉽다만.. 암튼 그 로봇도 신기했다.. 아마도 태엽 같은걸 감아서 한번에 풀어서 돌아가는 것 같긴 한데.. 암튼..
그리고 저 로피드 라는 로봇.. CM 촬영도 했나보다..
https://youtu.be/_pAONxT8cnI?si=cWB_JzP0gjt9gpq3
세정제에 염색된건가..?? (근데.. 아무리 봐도 저 로봇의 움직임은.. 뭔가 약올리는 듯 하면서 무서운 듯..)
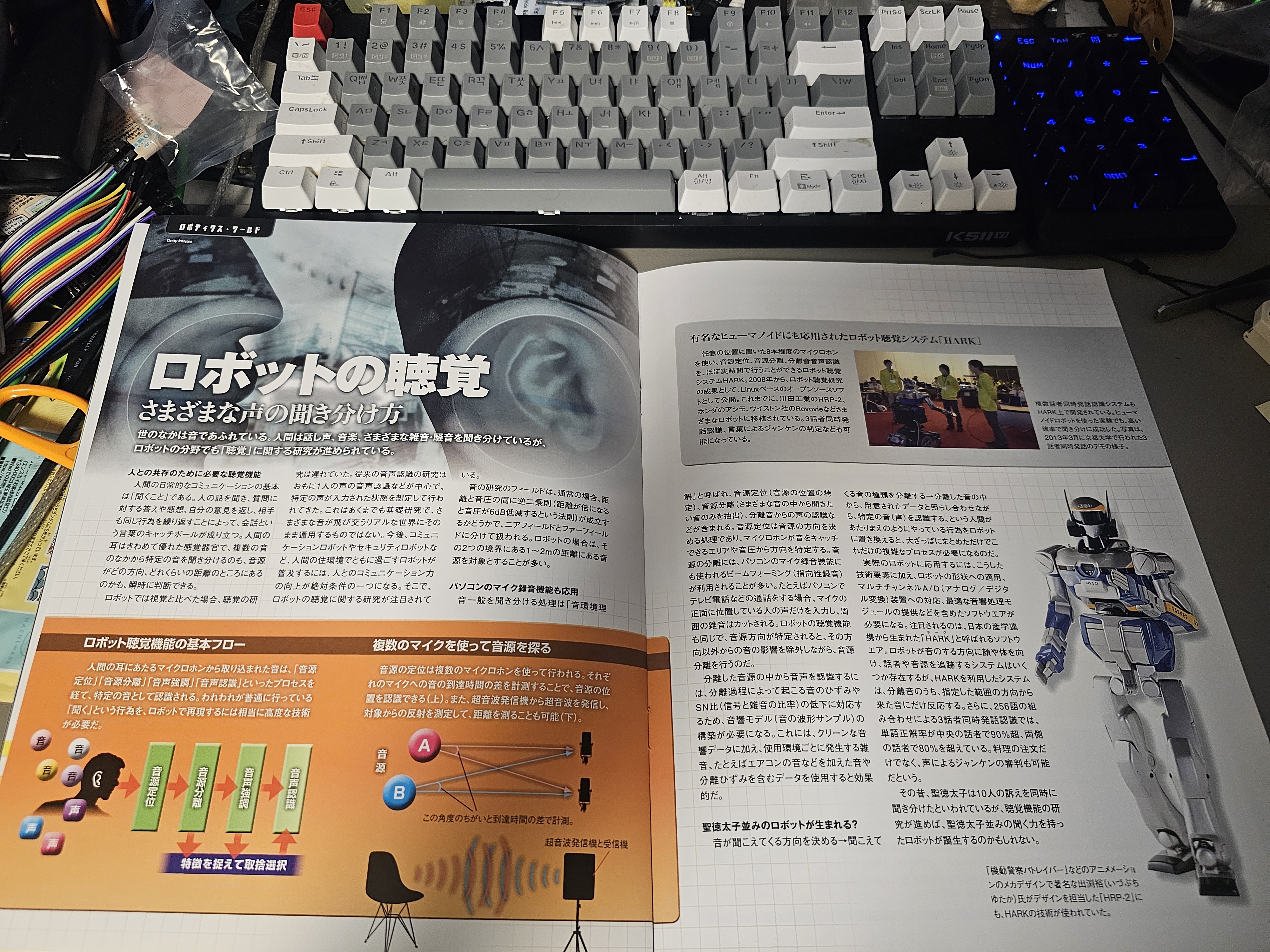
세번째 사진은 로봇의 청각에 관한 것이다.
아마도 내가 곧 만들어보고 싶은 로봇에도 중요할 것 같은 내용인데.. 로봇이 소리를 듣고 어떻게 인식하는지에 대한 과정을 설명하고 있다. 지금의 음성 인식과는 방식이 좀 다르긴 하겠지만.. 순서는 비슷한 것 같긴 하다.. 근데 도데체 아두이노 같은 저사양으로 어떻게 그렇게 음성인식이 잘되는건지는.. 좀 많이 신기하긴 하다.. 요즘은 하드웨어가 좋아서.. 인공지능으로 대부분 인식하는 반면.. 저 때는.. 거의 아두이노 같은 저성능 칩으로.. 해결했다는게.. 너무.. 놀랍다..
그리고 소리로 음성 방향을 찾는 얘기도 나오는데.. 그것이 현재 내가 구현해볼 과제이다. 근데 진짜 신기한건.. 음성이 마이크까지 도달하는 그 몇 ms를 감지한다는건데.. 소리가 그렇게 느린 것이 아닌데.. 그걸 거의 정확하게 들어오는 차이를 알고 그 방향을 추측한다는게.. 진짜 놀라운 것 같다.. 분명 마이크로 부터 MCU까지 도달하는 시간도 마이크 마다 어느정도 차이가 있긴 할텐데.. 그걸 캘리브레이션 한다고 쳐도.. 매번 조금씩 달라지기도 할텐데.. 어떻게 그 작은 차이를 파악하는건지.. 진짜 신기하긴 하다..
암튼.. 그건 그렇고.. 이제부턴 로봇 조립..!
 |
 |
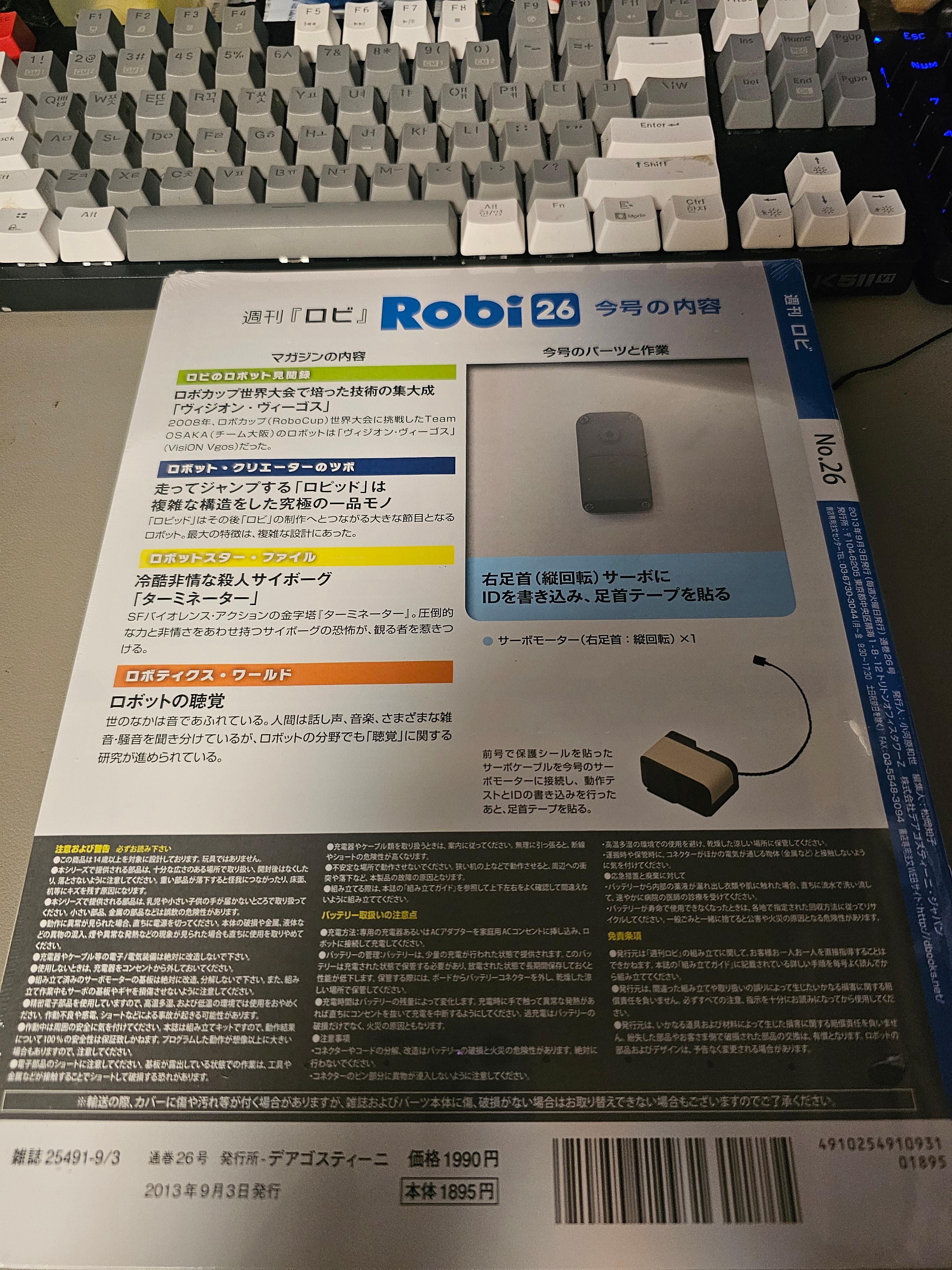
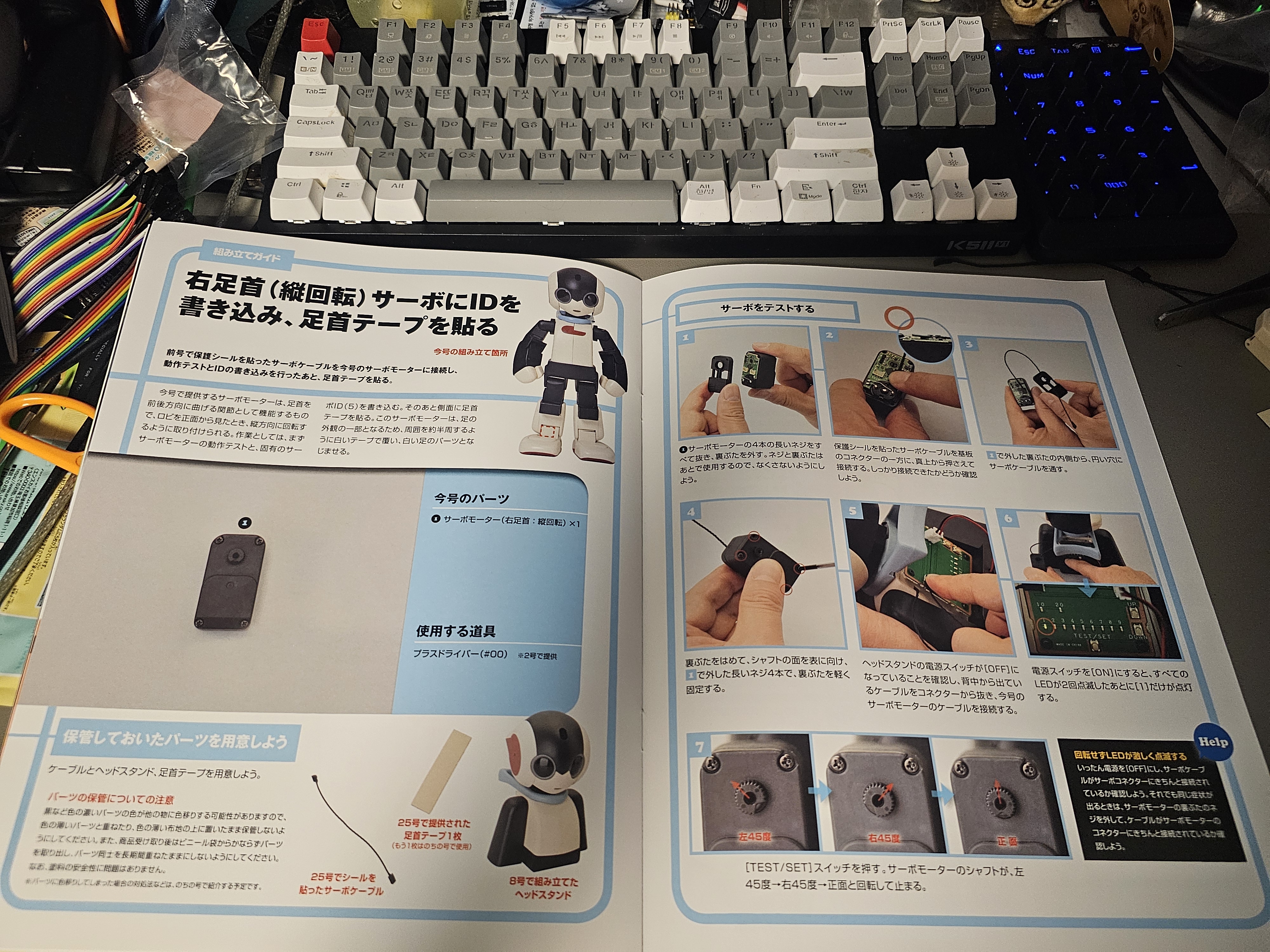
이번에도 모터만 제공하기 때문에 이전 모터 설정하는 설명과 같지만.. 이번엔 하나더 추가되어있다..! 스티커 붙이는거..
 |
 |
모터를 분해해서 케이블을 끼우고 설정하는 것 까지는 똑같은데..
이 이후부터가 제일 빡쳤다.. 진짜 제일 짜증나는 부분이였다..

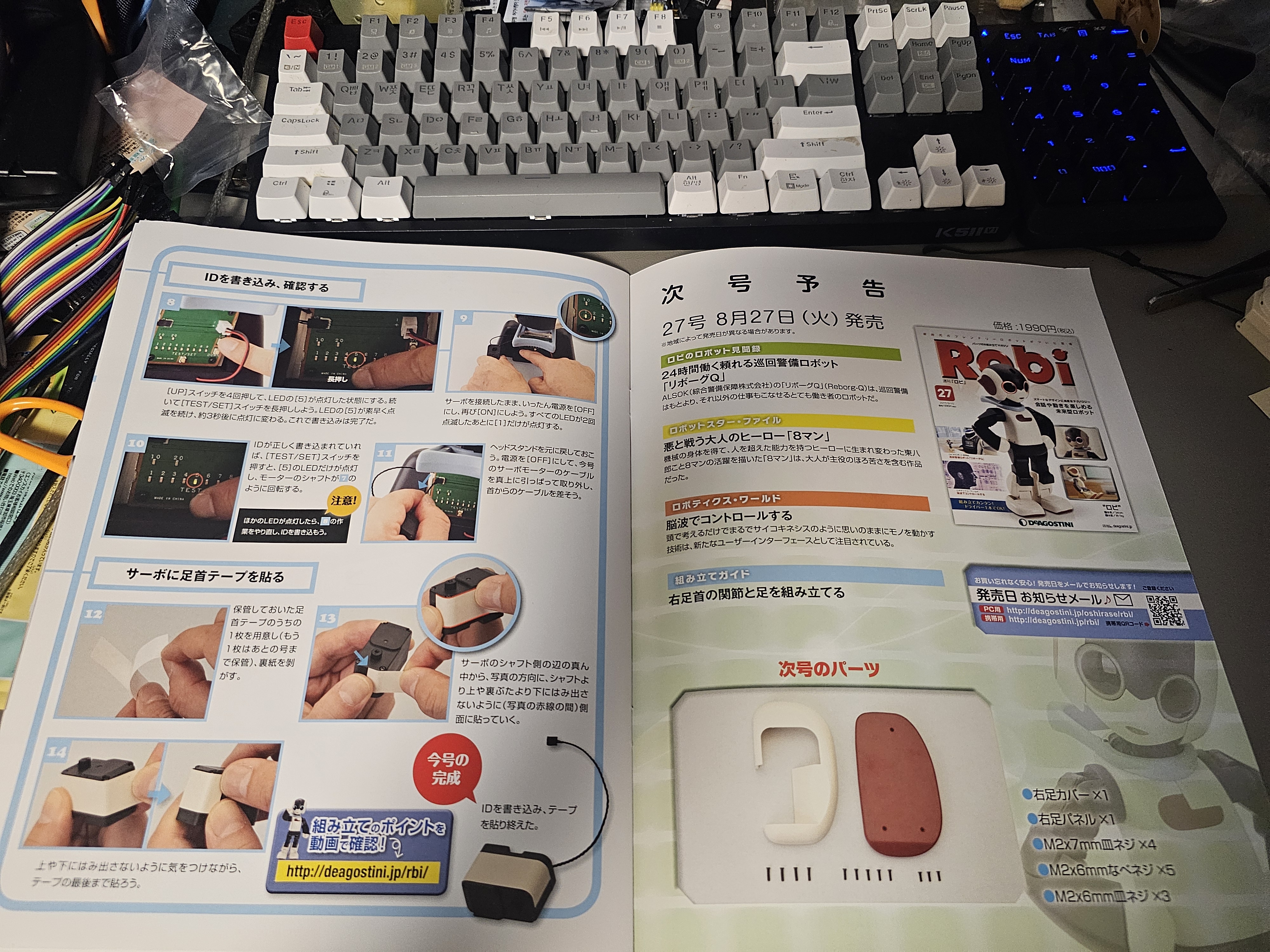
이전 권에서 받은 스티커인데.. 여유분도 없이 딱 필요한 만큼만 있어서.. 실패해서도 안된다..
이 스티커는 로봇의 다리 부분에서 다른 부품과의 색이 다른걸 막기 위해 붙이는 스티커인데.. 몇년이 지나서인지 접착력이 엄청 약하다.. 말도 안되게 약하다..
게다가.. 나는 땀도 나서.. 거의 붙이기 힘들 정도..
암튼 저거를..
 |
 |
 |
이렇게 붙여주면 된다..
뭐 이후 권에서 다시 말하겠지만.. 미리 말한다면.. 저거 저 때는 잘 붙었지만.. 이후에 보관 후에는 잘 떨어져서 결국 양쪽에 절연테이프? 그걸 붙여서 고정시켰다.. 근데.. 그것도 안되서 중간이 붕 떠서.. 아직도.. 마음에 안든다..
근데 문제는 다리를 다 조립한 지금 보면.. 스티커가 색이 바뀐건지.. 아니면 애초에 이런건지.. 흰색 프레임과 색이 약간 차이가 나서 오히려 스티커가 없이 검은색으로 보이는 것이 더 나을 것 같이 보인다..
어쨋든.. 제일 짜증났던 부분인데.. 앞으로도 나올 예정;;
암튼 이번껀 이렇게 조립이 끝났다..!
그럼 끝