Darwin OP 2 제작 도전 [2. 가상 조립 - Head]
이번엔 머리 부분을 해볼 것이다.
머리 부분은 아주 간단하다.. 아마도..?
일단 이번 설명서는
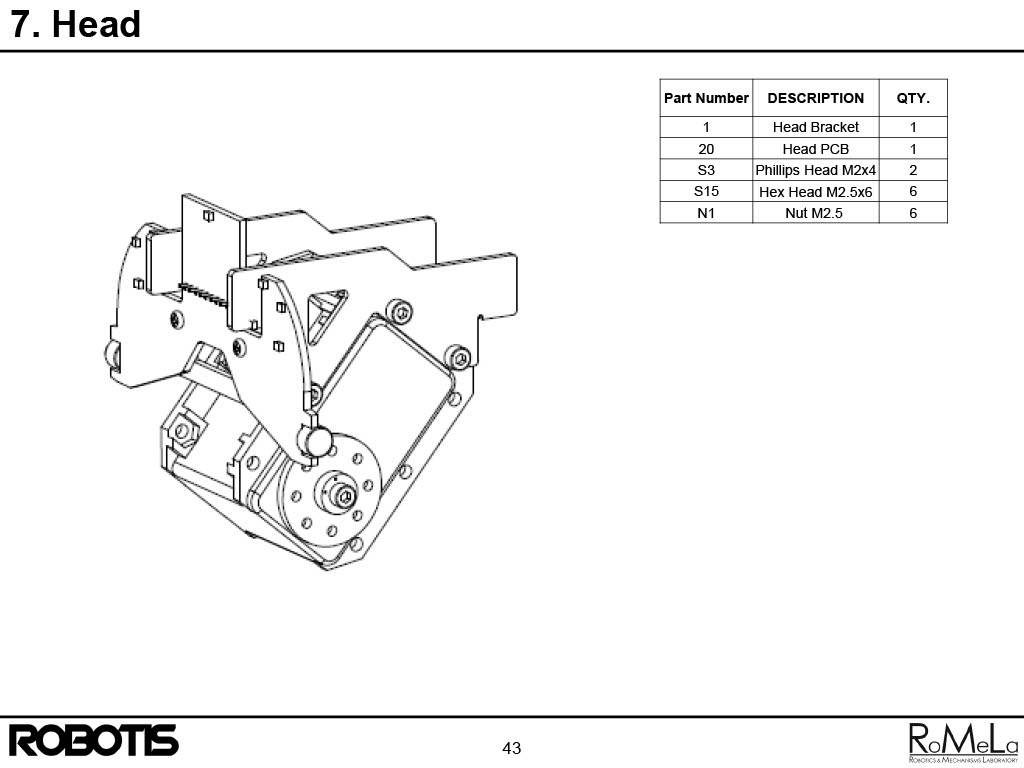 |
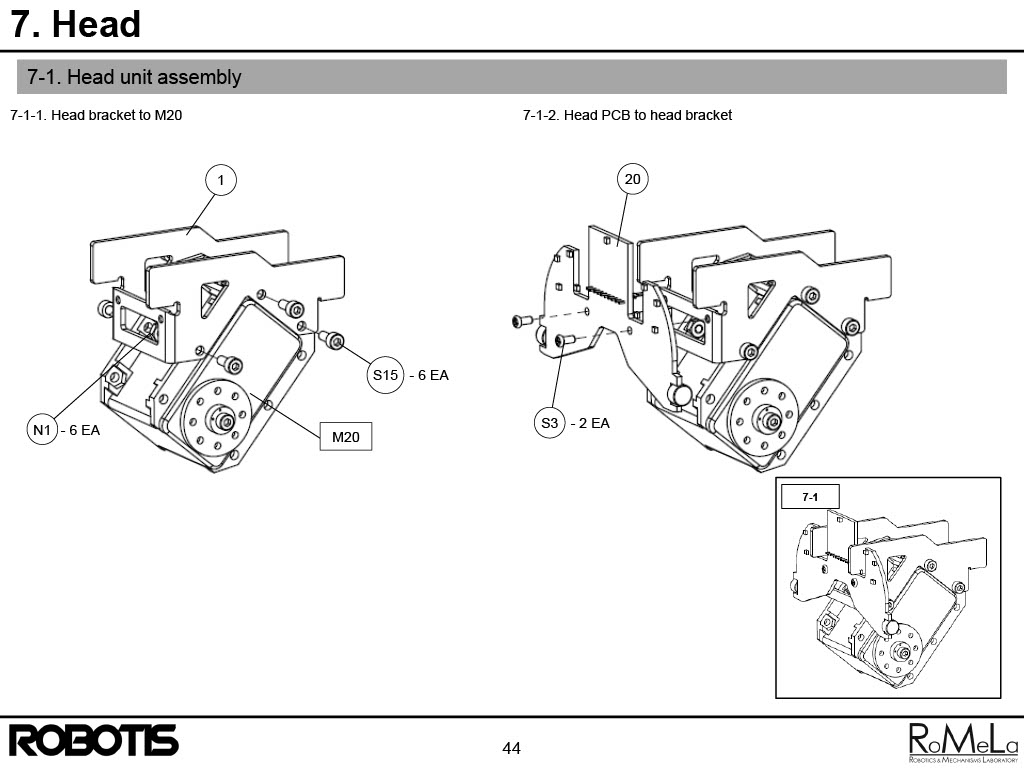 |
딱 2장...
일단.. 조립을 해봤는데..
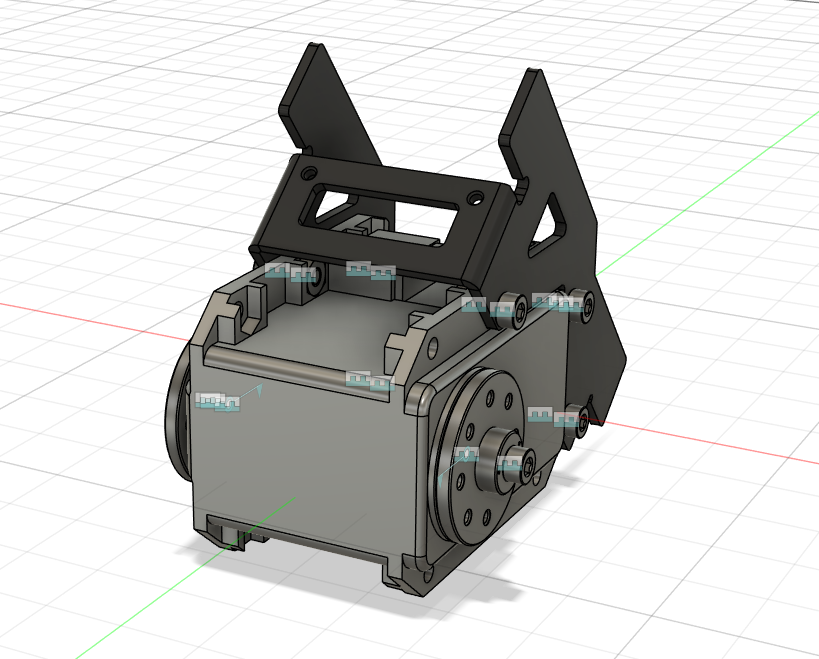
여기까지는 어렵지 않다..
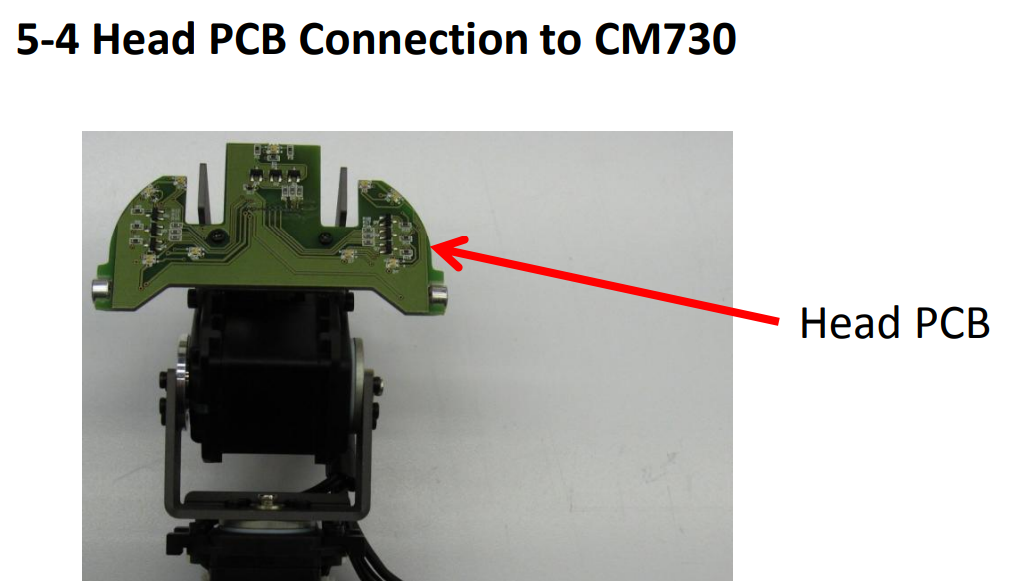
이후에 머리 PCB는 어떻게 해야하냐가 문제다..
이건 오픈소스 프로젝트이니깐 아마 PCB 부분은 남아있을 것 같은데..
1시간 동안 찾아보고 왔는데.. 없다..
있으면 나중에 PCB라도 만들어서 할까 싶었는데.. 그러기도 어려워졌다.. PCB를 처음 부터 만드는게 아니라면 하기가 어려워져버렸다.. 음...
그나마 있는 정보라곤..
 |
 |
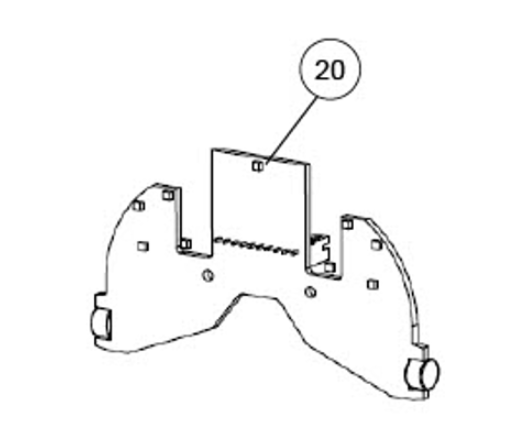 |
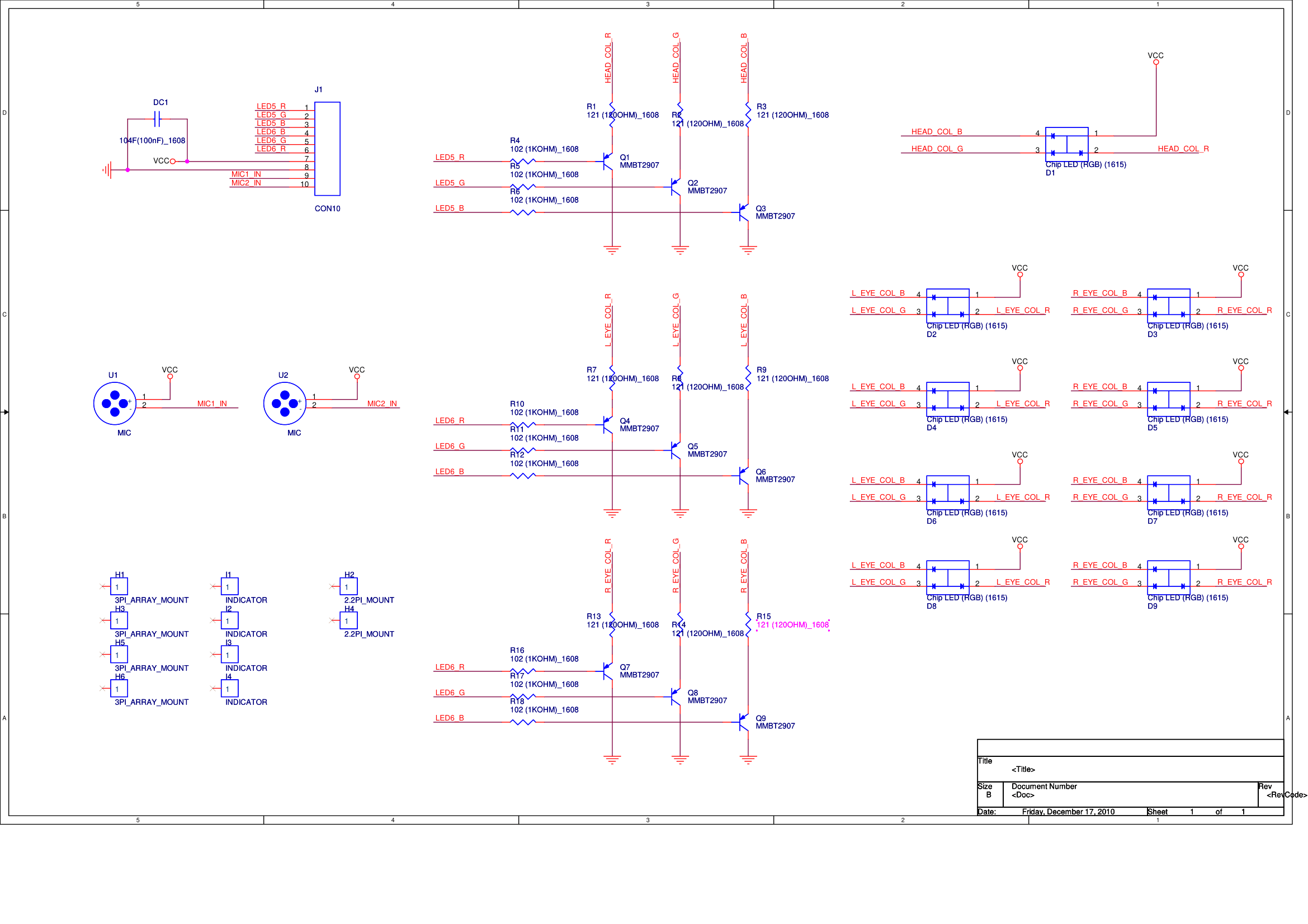
일단.. Head PCB는 못 구하기 때문에.. 만약 나중에 프레임에 제작하는걸 성공했을 때.. 전자회로 도면하고 참조 사진을 보고 만들어야 겠다..
일단 회로도만 봤을 때는.. Head PCB의 기능은

각 눈마다 4개의 RGB LED가 있는 거하고 위쪽 상단에 삼각형 RGB LED 1개 있는 것에.. 양쪽에 - 모양으로 생겨 구멍뚫린.. 저거.. 마이크 구멍으로 추정되는데 마이크가 있는 것으로 볼 때..
그냥 RGB LED 4 + 4 + 1개를 제어하고 마이크 2개를 입력 받아서 메인보드로 전달하는 역할인 것 같다.
참고로.. 코 쪽의 카메라는 저 머리 PCB보다 앞에 붙여지게 되어있다.. 카메라도 어떻게 해야할지 굉장히 문제..
어쨋든 이걸로 새로 알게된 사실은.. 나는 LED가 360도로 대충 한쪽 마다 8개 이상씩은 박혀있을 줄 알았는데.. 4개 정도씩만 박혀있다는 정보를 알게 되었다. 그리고.. 마이크..

이걸 쓴다는 것을 알았다..
Main Controller > Datasheets > Sensor > DARwin-OP_Mic.pdf에 있는 정보다.
어쨋든 모양은 알았고 크기도 대충 짐작은 가서.. 머리 PCB를 대충이라도 모델링은 할 수 있지만.. 일단 안하는게 나을 것 같다.
확실한 규격을 모르기도 하고.. 가상 조립을 다 했는데.. 크기가 약간 달라서 수정하는 것은 하고 싶진 않다..
그래서 일단 이 부분은 패스해야할 것 같다..
일단 PCB 부분을 제외하고 조립을 완성한 것을 보면.. 별건 아니지만.. 이렇다!

아무튼 끝!