 |
 |
이번엔 16권!
 |
 |
 |
 |
 |
첫번째 사진은 PR2에 대한 로봇을 말하는 것 같은데, 이 로봇은 처음 본다.. ROS로 작동하고 연구 이런걸로 사용되기 위해 만들어졌다는 것 같은데.. 굉장히 신기하다.
예전에 ROS를 검색했던적이 있던 것 같은데.. 어디 때문에 검색해보았는진 기억 안나지만 아마도 휴머노이드 로봇을 제어하기 위한거거나 대회 로봇 때문에 찾아봤던 것 같다. 그냥 찾아보기만 하고 써보진 않았는데 언젠가는 써보고 싶기는 하다. 사용법을 몰라서 안쓸뿐..
두번째 사진은 걷는 방법에 대한 이야기 같은데.. 나는 걷는 방법에도 이름이 정해져 있을 꺼라곤 생각하지 못했다.
여기에선 SHIN-Walk라는 방법을 쓰는 것 같은데 이 걷는 방법은 나도 자세히는 모르겠지만 찾아보다가 이곳에 누군가가 적어놓았다.
https://raionnoie.blogspot.com/2013/03/shin-walk.html
SHIN-WALKの仕組みをわかりやすく解説してみた
ガジェット系ブログ。 現在はデアゴスティーニのロボット「ロビ」の記事が中心。
raionnoie.blogspot.com
뭔가 이 분도 나와 비슷하게 ROBI에 대해 정리하시는 분 같은데.. 나중에도 좀 봐야할 것 같다.
저분 글을 보다가 한가지 발견한게.. 눈의 필름은 마지막에 떼야하는거라고 나와있는데.. 음.. 나중에 테이프로라도 붙여야겠다..
나중에 한번 제대로 저 걷는 방법에 대해 찾아보고 내가 가지고 있는 다른 휴머노이드 로봇에도 적용시켜봐야 할 것 같다.
아무튼 조립!
사실 조립할껀 없다..

부품이 이거 한개라서..
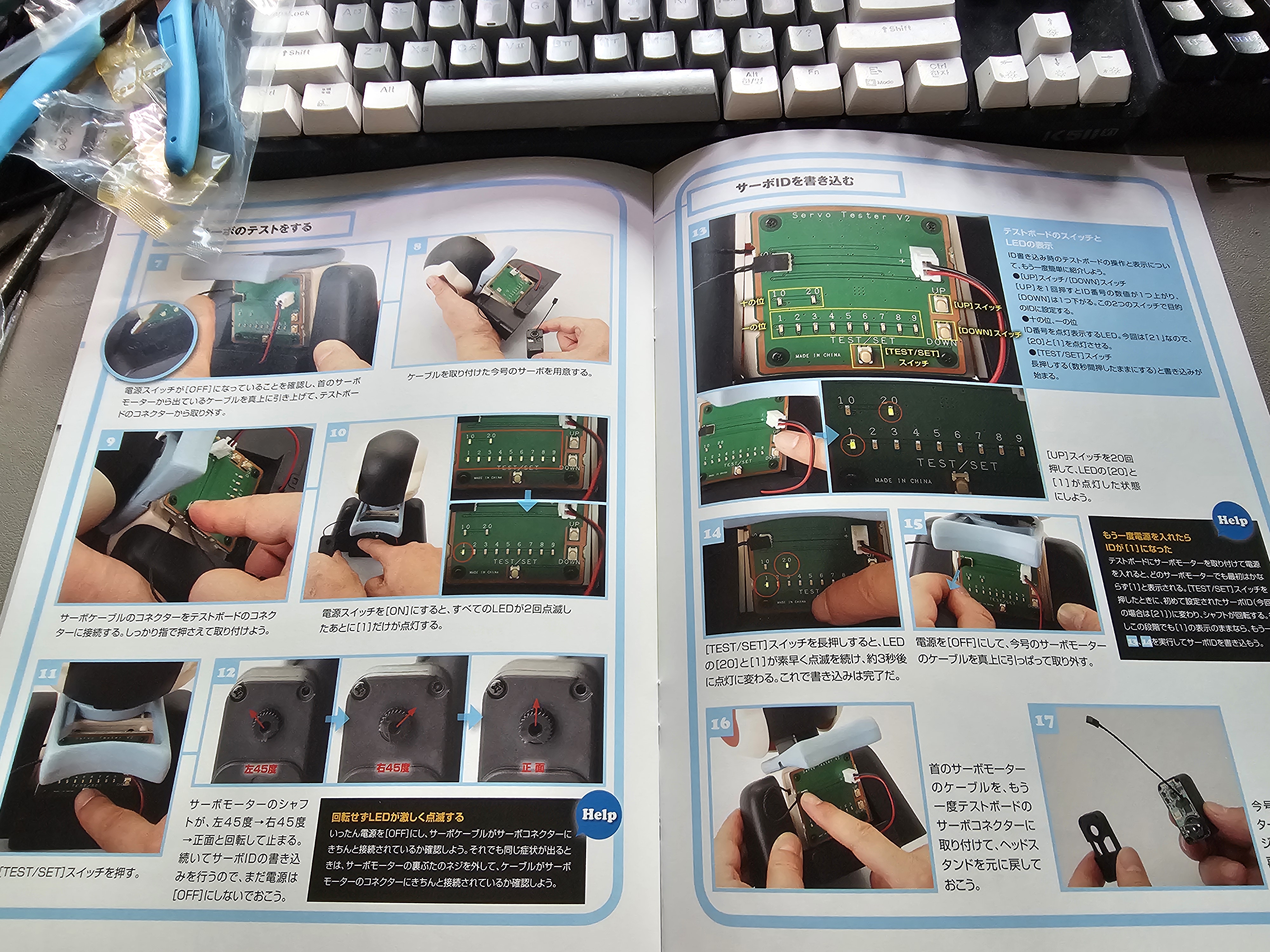
그냥 모터에 케이블 끼우고

모터 ID를 써주면 끝
16권도 끝이 났다!
'로봇 > ROBI' 카테고리의 다른 글
| Robi 로봇 제작 - 18권 (반대 팔 조립) (0) | 2024.09.03 |
|---|---|
| Robi 로봇 제작 - 17권 (반대 팔 조립) (0) | 2024.08.14 |
| Robi 로봇 제작 - 15권 (반대 팔 조립) (0) | 2024.08.12 |
| Robi 로봇 제작 - 14권 (팔 조립) (0) | 2024.08.12 |
| Robi 로봇 제작 - 13권 (팔 조립) (0) | 2024.07.27 |