이번엔 저번 글에 이어 컨트롤러 결정 2번째이다.
이제 어느정도 어떻게 구성해야할지 잡혀서, 이것에 대해서 잠시 정리할 것이다..
일단 우선!
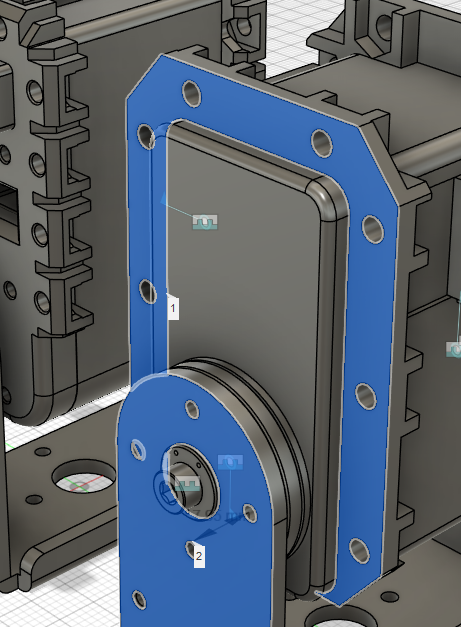
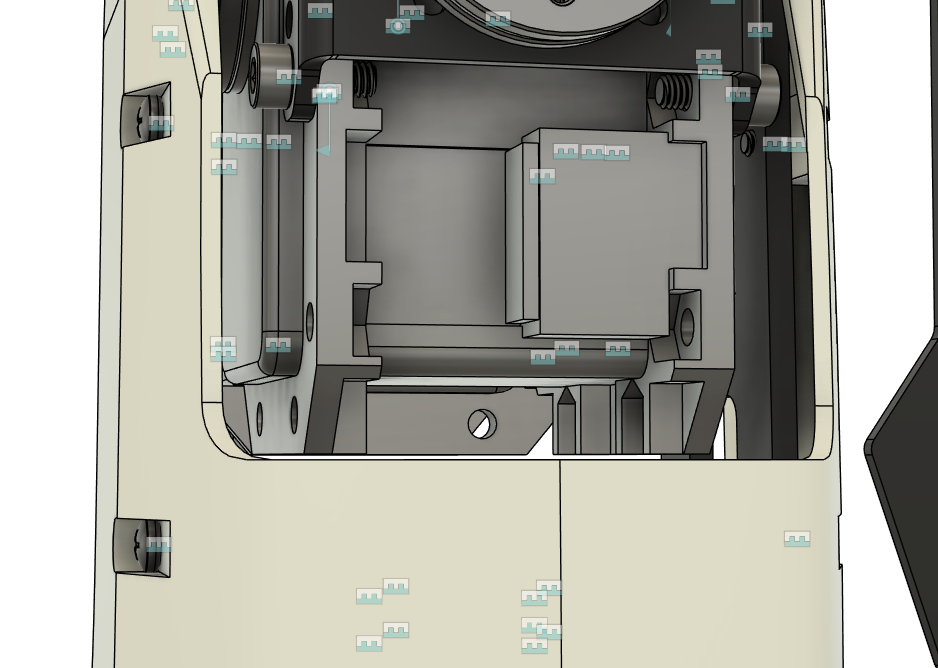
한가지 문제가 있다. 임시로 라즈베리파이랑 OpenCM9, OpenCM 485를 같이 둬봤는데..
 |
 |
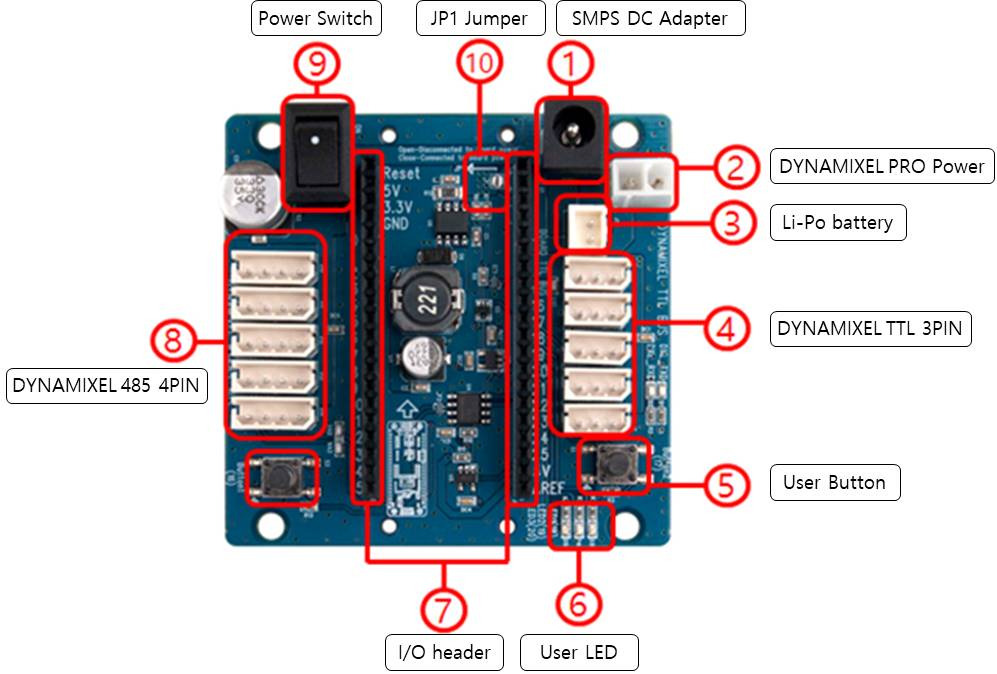
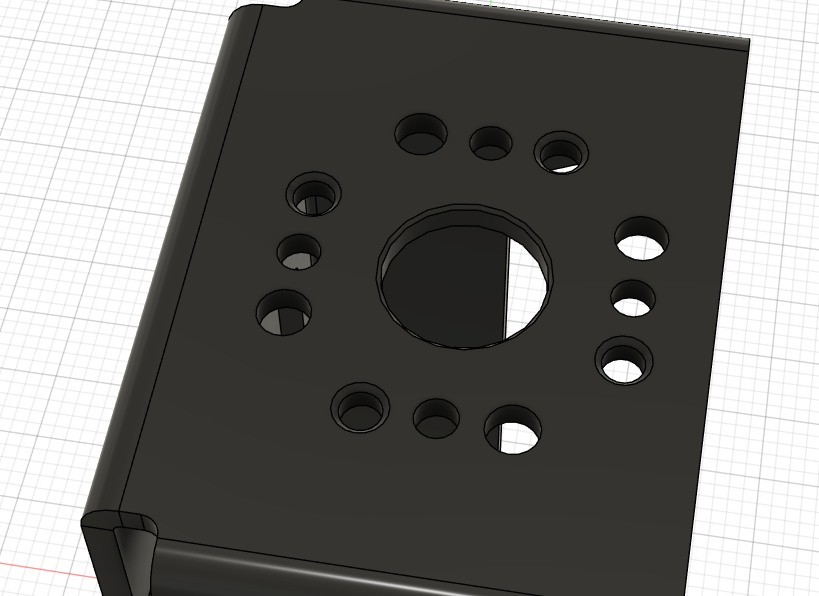
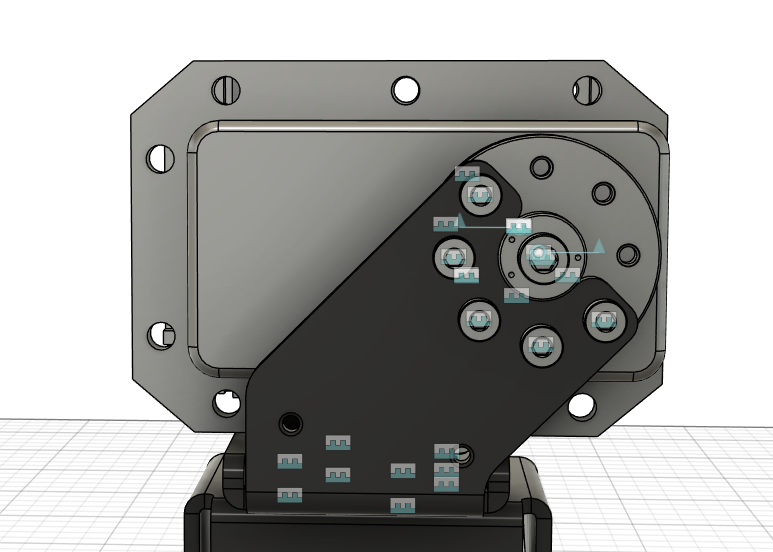
보이는 것 처럼 크기가 너무나도 부족하다.. 오른쪽 사진에 구멍 8개 뚫린 저것이 OpenCM 485인데.. 저 정도까지 클 줄은 몰랐다..
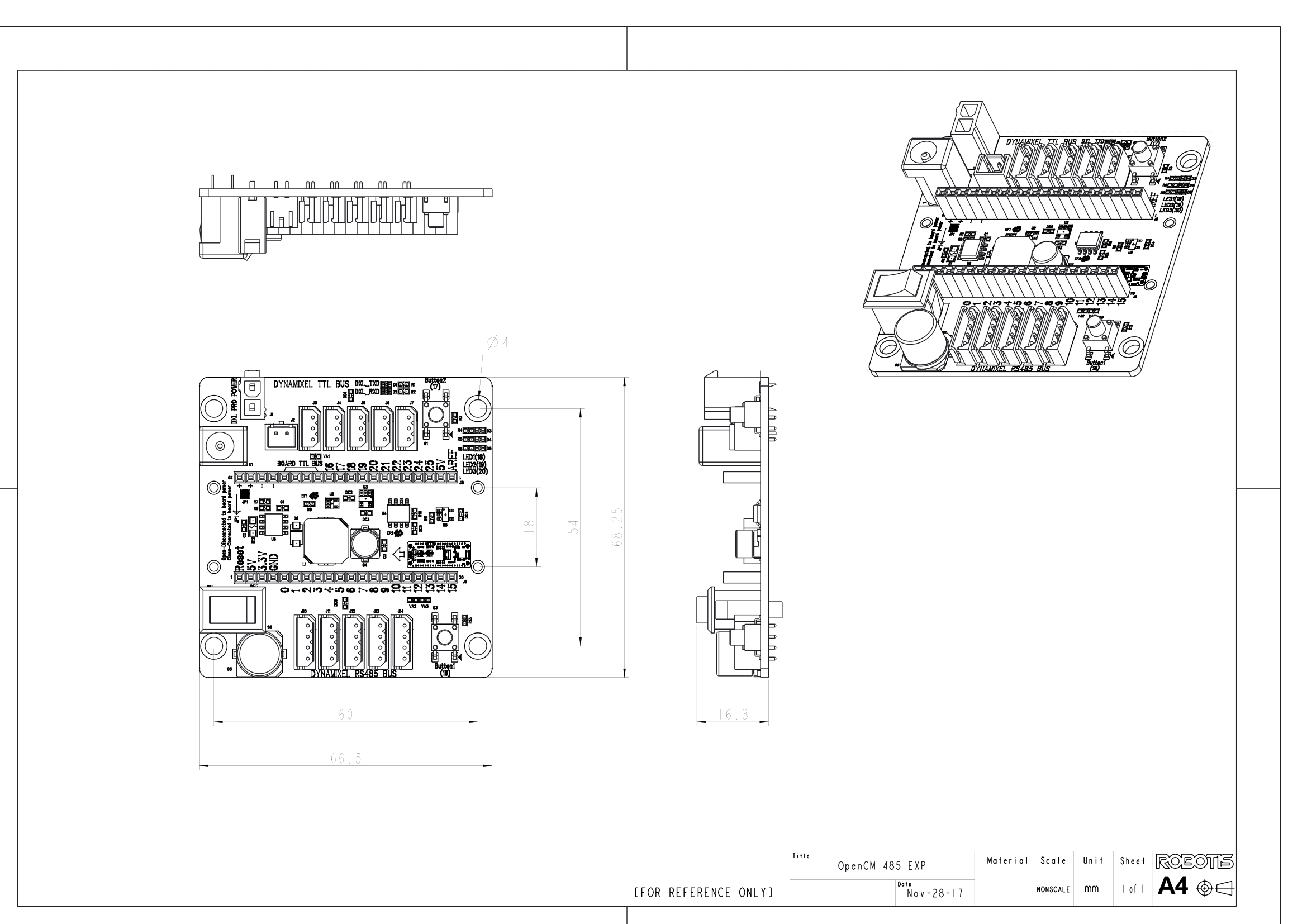
그나마 다행인점은 라즈베리파이는 크기 조정이 안되서 못 건들이지만 OpenCM9 + OpenCM 485에서 OpenCM 485는 아마도지만 생략이 가능할 수 있다는 것이다.
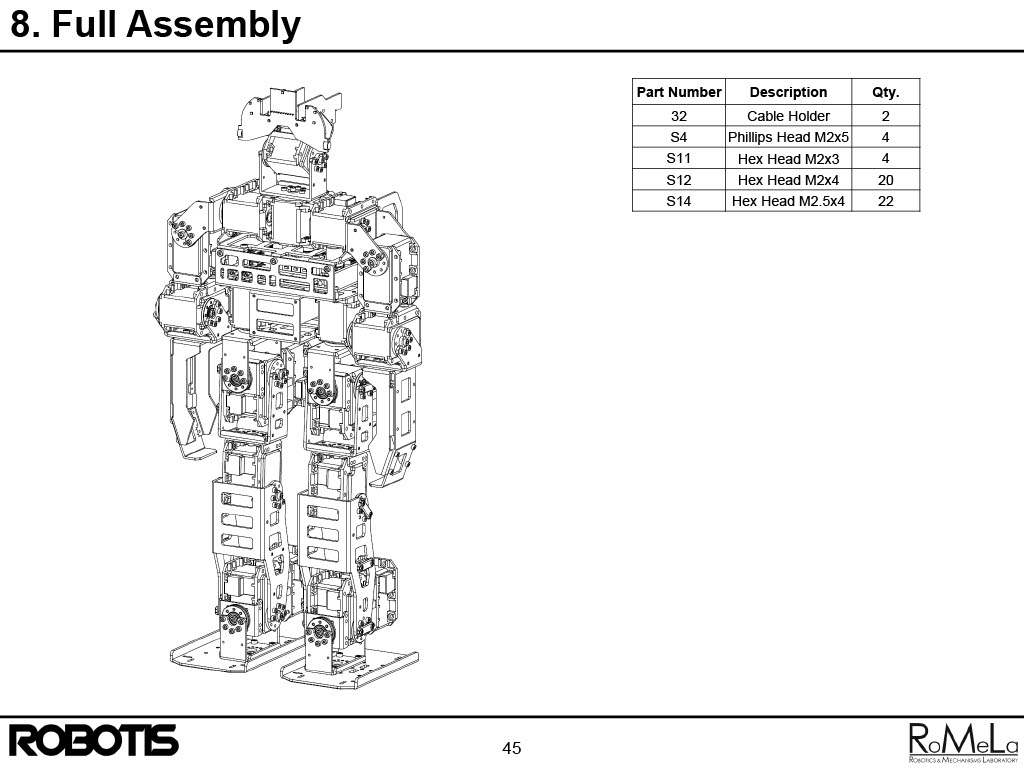
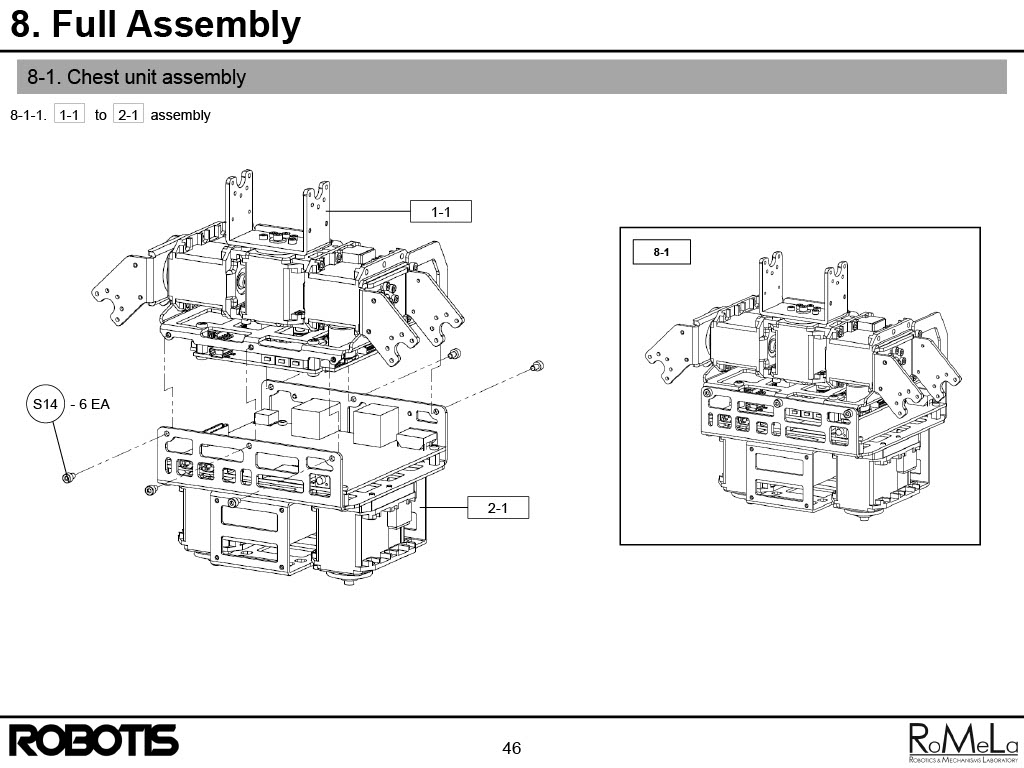
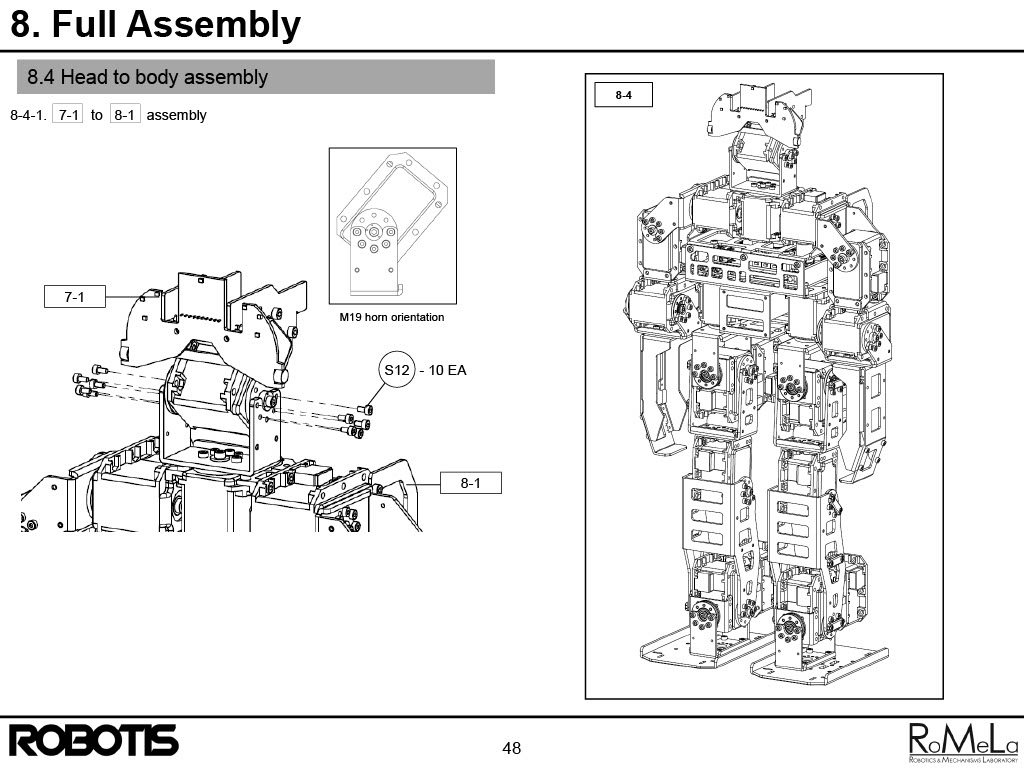
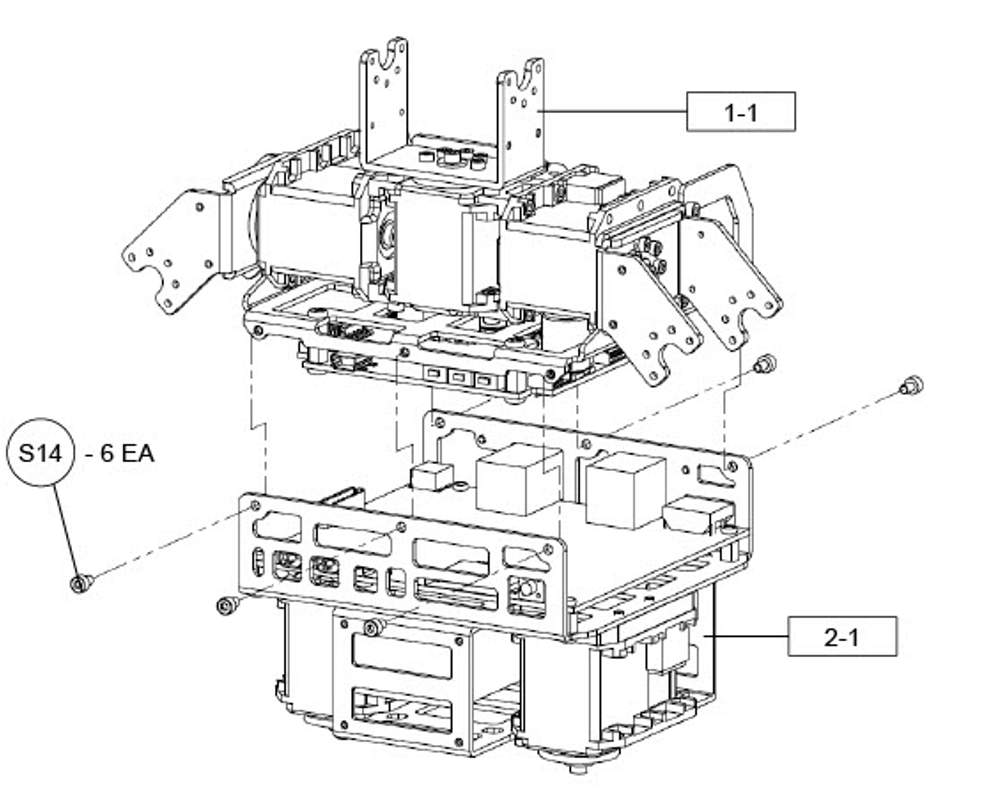
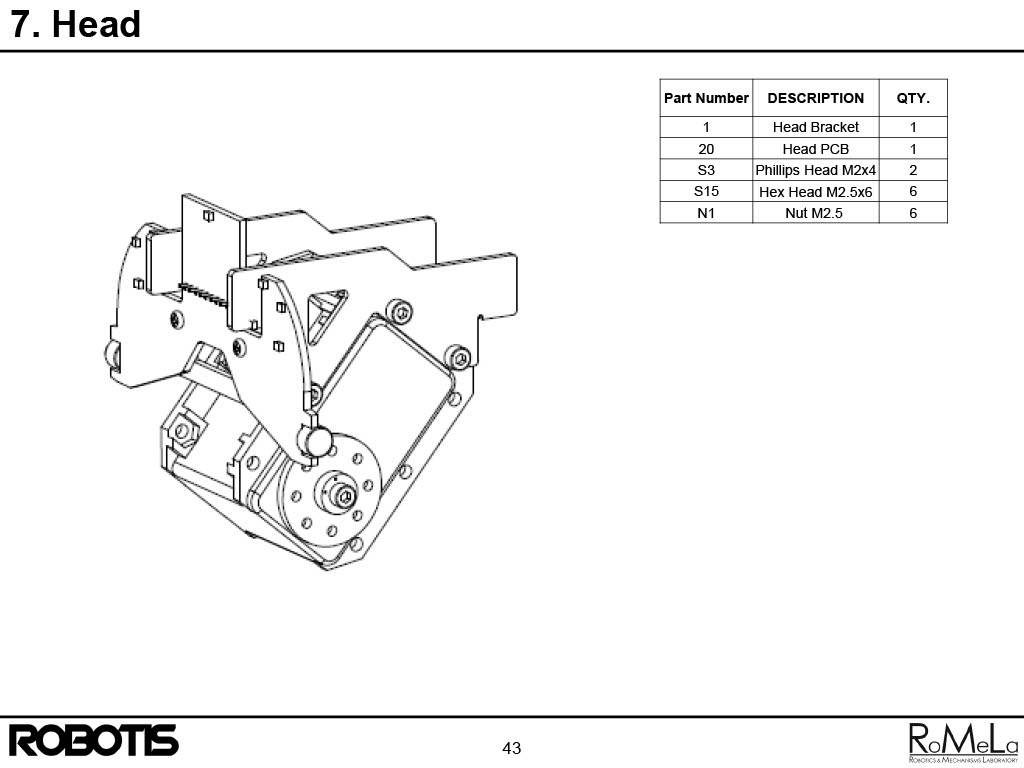
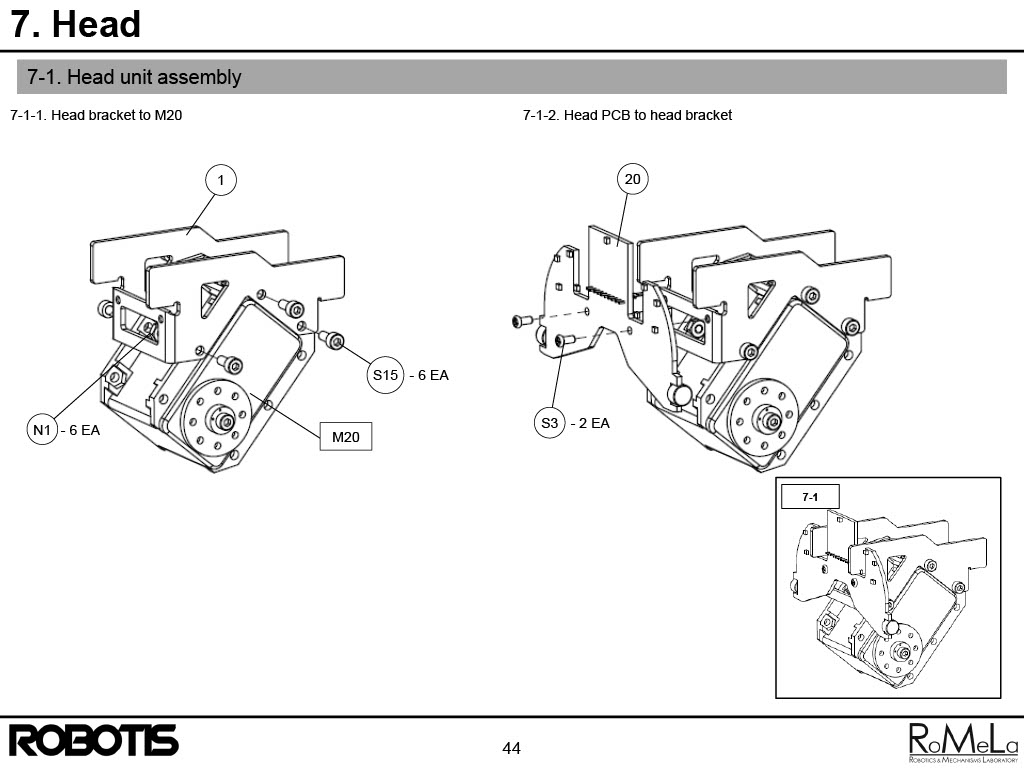
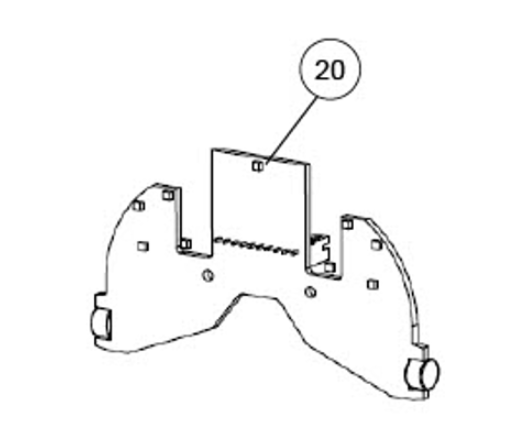
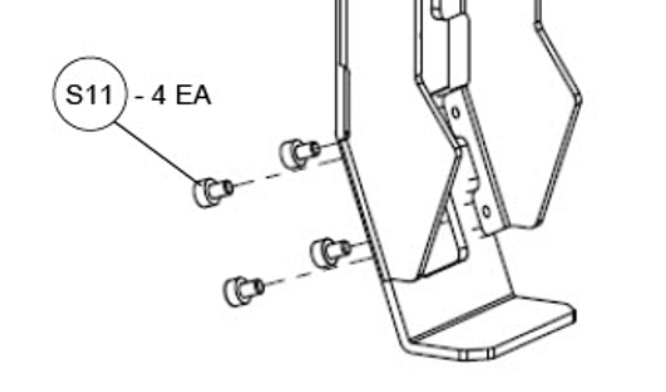
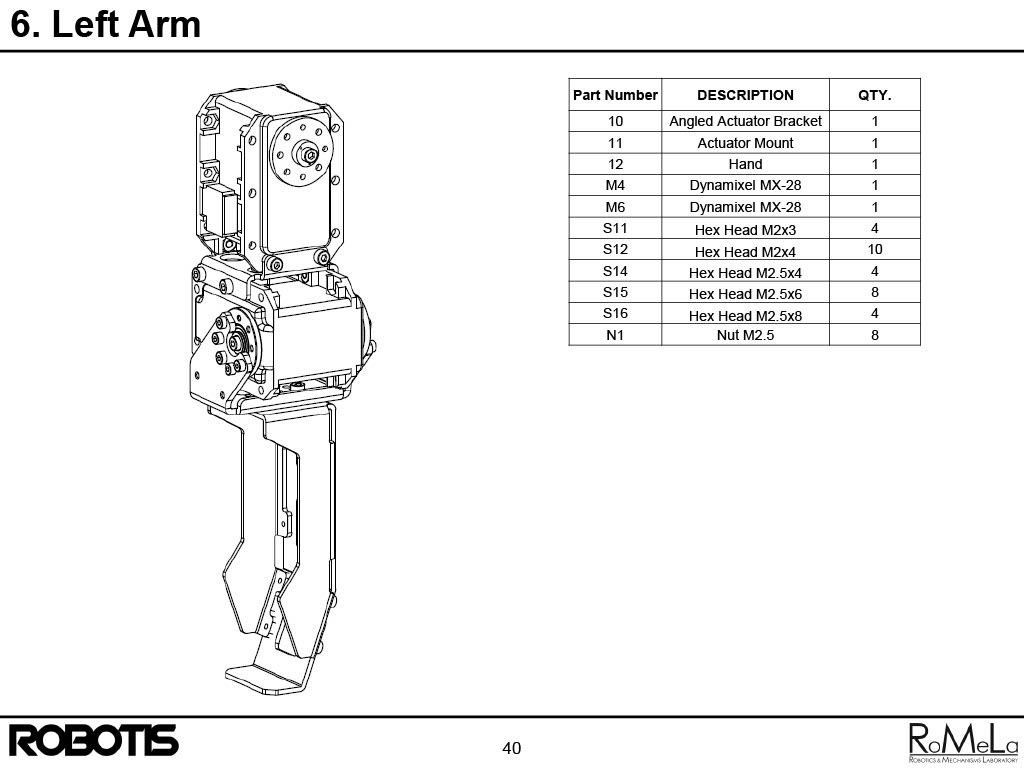
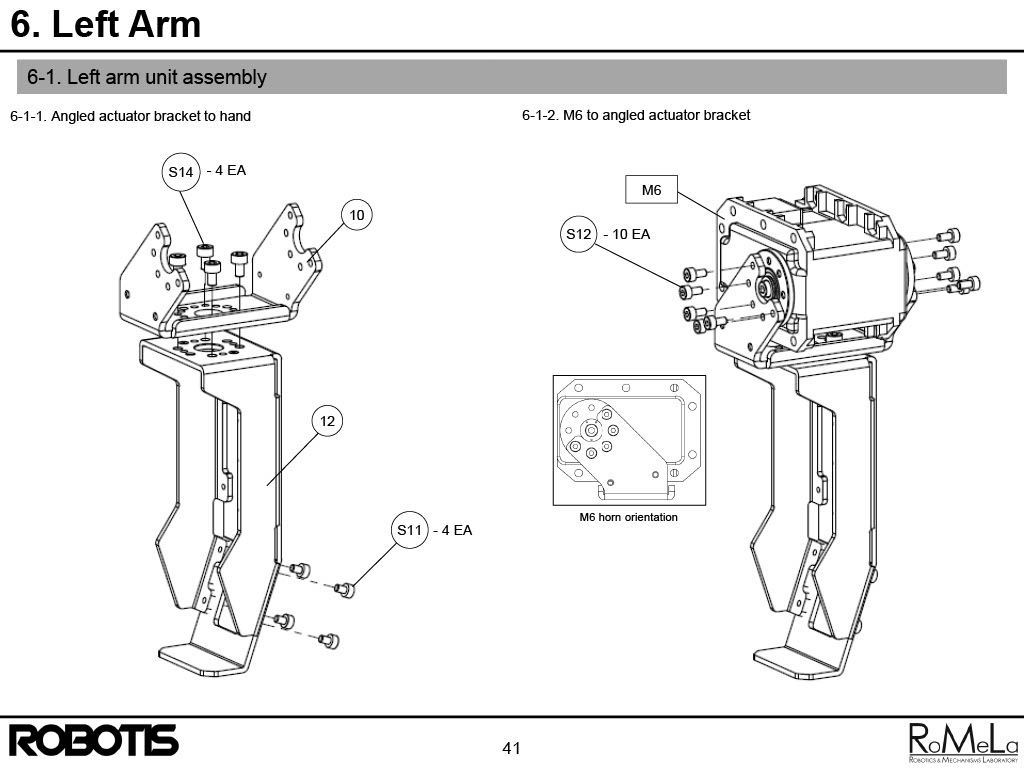
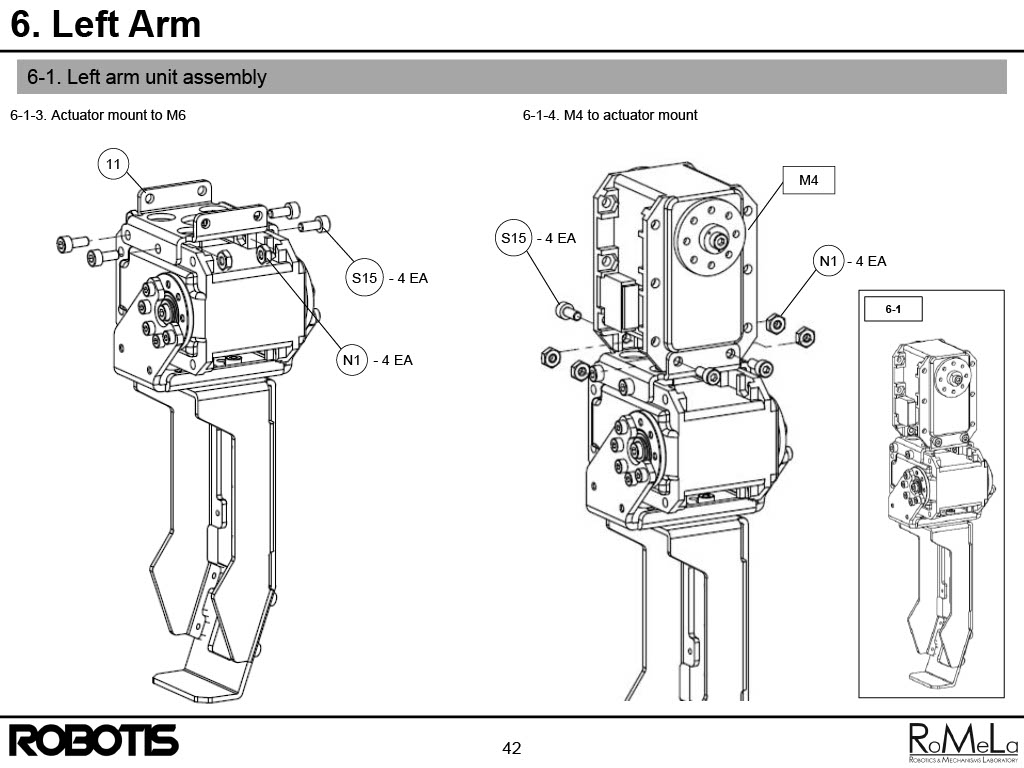
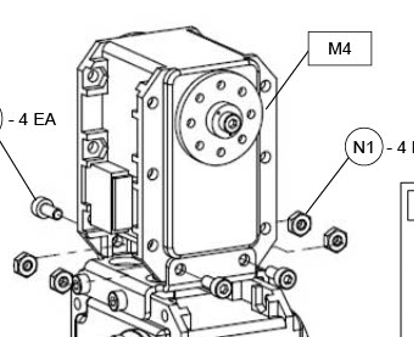
참고로 설계 도면은 Robotis에서 제공하고 있는데 이렇다.
 |
 |
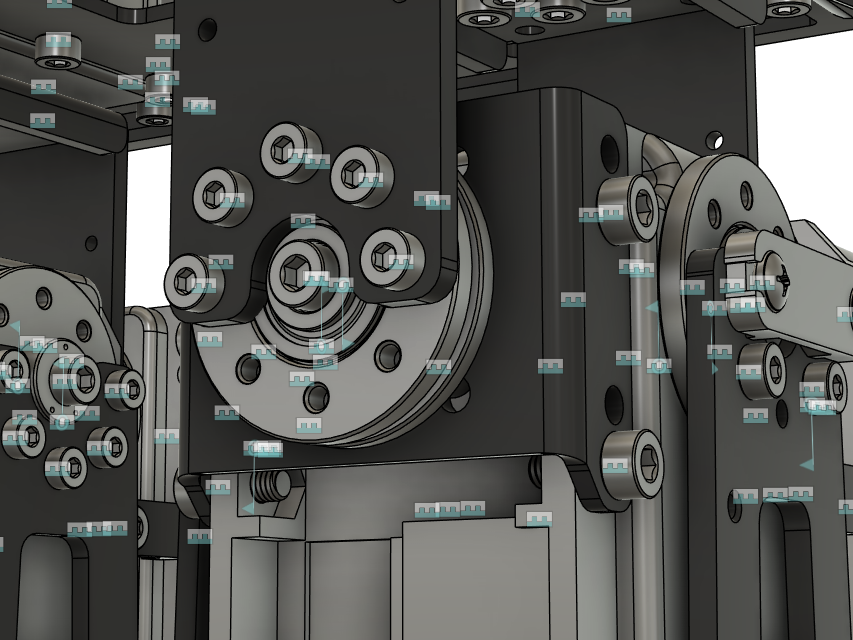
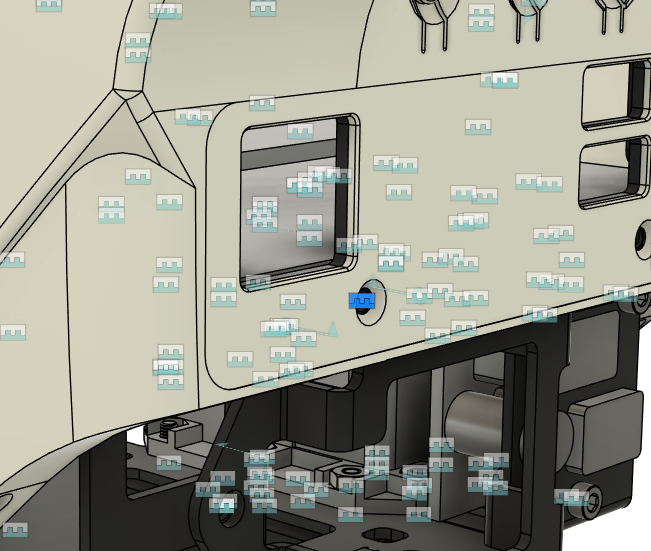
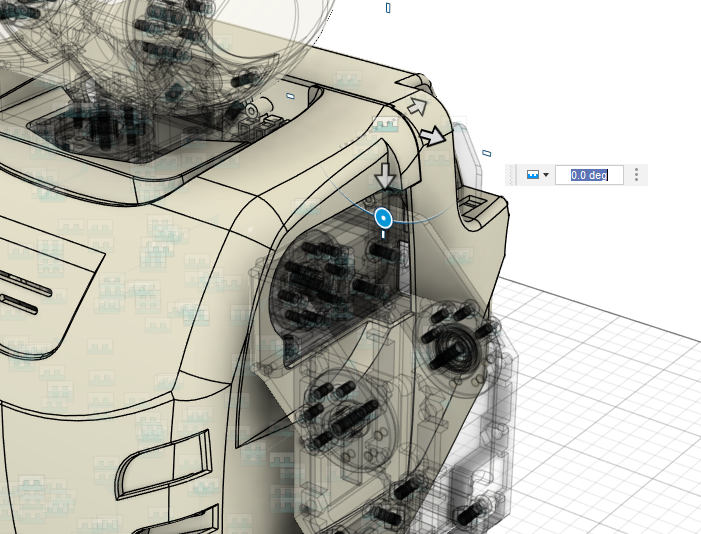
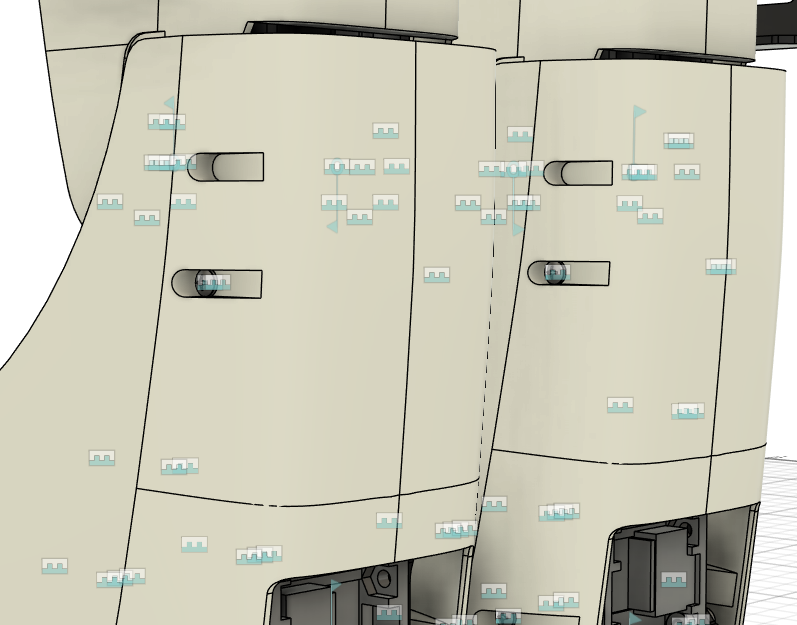
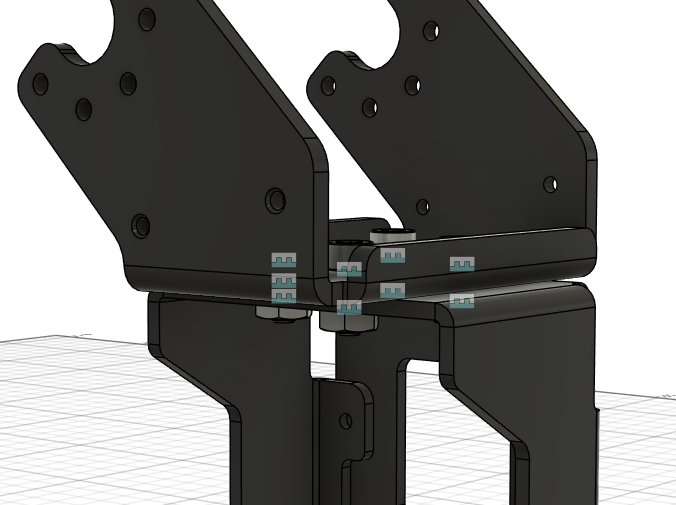
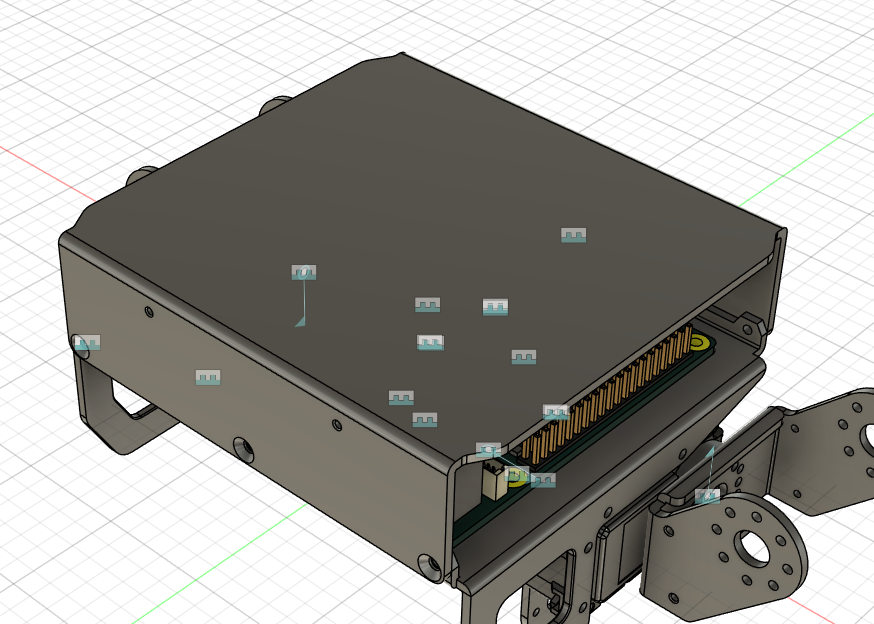
어쨋든 만약 그렇게 되면..
 |
 |
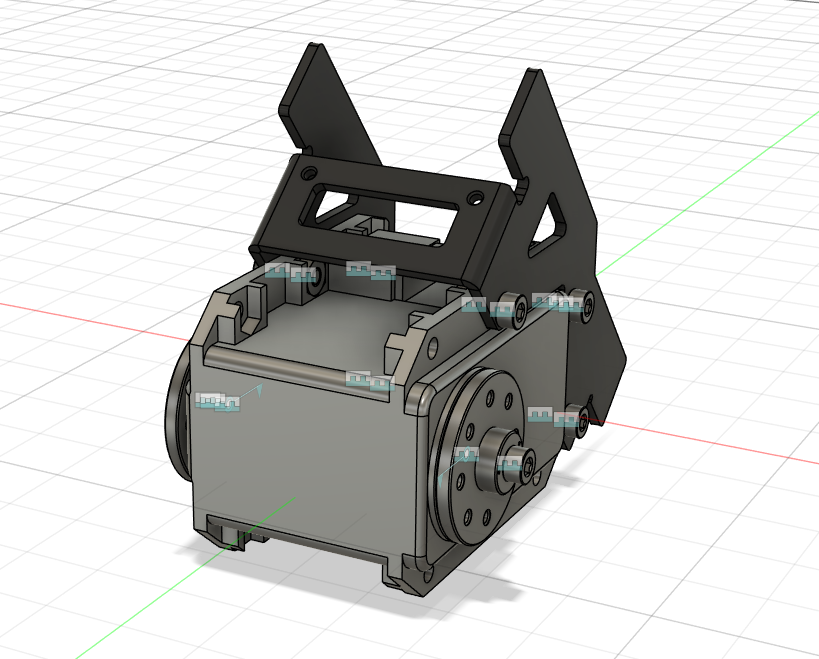
이 정도 크기로 확실히 배치가 가능해진다..
뭐.. 선들이 엄청 복잡하게 이어질 것 같긴 하다만..
그리고 저렇게 하면 애매하지만 Molex 확장 포트도 연결이 가능할 것이다. 아마도..
근데 이 것의 경우 전력이 충분한지.. 등등을 아예 모르기 때문에.. 이것에 대해서는 Robotis에 문의 해봐야 알 것 같다.. 문의하고 답장 오면.. 수정할 예정
그리고 뭐 LED나 쿨링팬이나 버튼이나 추가적인 센서들을.. 전부 장착 가능할지도 잘은 아직 모르겠다..
혹시라도... 조립을 완료해봤을 때.. 진짜로 안될 것 같다면.. Raspberry PI CM5도 고민해야할 것 같다..
만약 그렇게 된다면.. 일단.. 군대 갔다와서 하게 될꺼라는게.. 뻔하다...
OpenCM 9 추가적으로 알아본 것
뭐뭐 어쨋든..
이제부턴 추가적으로 연결이 가능한 것을 작성할려고 한다..
이제부터 볼 것은 https://emanual.robotis.com/docs/en/parts/controller/opencm904/
ROBOTIS e-Manual
emanual.robotis.com
여기에 작성되어있는 것들이다. 물론 한국어 메뉴얼도 있지만.. 그곳에는 내가 궁금한 정보가 안적혀있는 경우가 있다..
자이로센서
일단 우선 자이로 센서이다.
자이로 센서의 경우 기본적으로 Robotis에서도 판매를 하고 있는데..
https://www.robotis.com/shop/item.php?it_id=902-0042-000
자이로 센서 GS-12
각가속도 측정
www.robotis.com
이 제품이다..
근데 문제점이 한가지 있다.. 그냥 진짜 자이로 센서이다. 가속도 센서나 이런게 없다. 심지어 Z 축은 없는 것 같다.. 그래서 그냥 자이로 센서 2축 밖에 없다.. 게다가 3만원으로 비싸다..
그렇기 때문에.. 저걸 사용하기는 어렵다.. (어쩐지.. 바이올로이드가 자이로 센서를 거의 사용하는 느낌이 없더라니..)
아무튼 그것 때문에 저 자이로센서는 사용할 수가 없다.
참고로 저 자이로센서의 경우
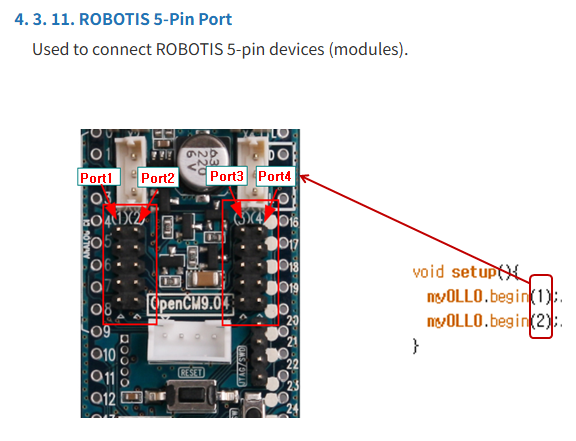 |
 |
이런식으로 저 5핀에 연결할 수 있다.
근데 문제는.. 로보티즈 5핀이라는 것이다.. 내가 사용할려는 외부 센서들은 사용하기 어려울지도 모른다는 것이다..
어쨋든.. 그래서 그건 제쳐두고.. 내가 사용할 센서를 대충 본다면..
일단 CM 740에 있는 센서를 본다면..

https://emanual.robotis.com/docs/en/platform/op2/getting_started/#sub-controllercm-740 여기에 적혀있는데..
일단 3축 자이로스코프, 3축 가속도 센서가 달려있다고 한다..
그래서 저걸 만족하는 센서를 알아야 한다.
| MPU6050 | ICM-20948 | GY-87 |
 |
 |
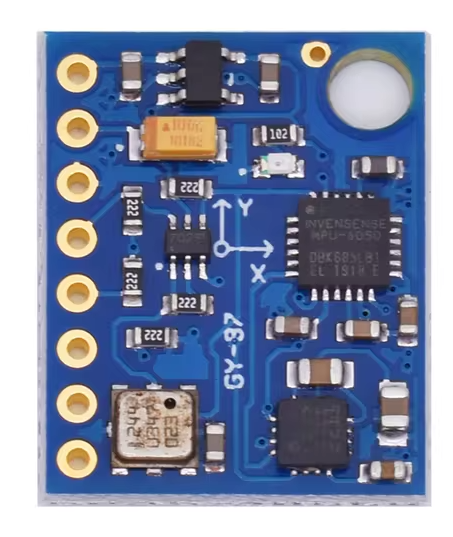 |
내가 아는 센서들은 이렇게 3개 정도이다. MPU6050은 자이로 3축, 가속도 3축으로 6축에 온도 센서이고 ICM 20948하고 GY 87은 자이로 3축, 가속도 3축, 지자기 3축으로 9축에 온도하고 고도 정도로 되어있다. (참고로 ICM 20948과 GY 87의 차이는 내가 알기론 측정 기판?이 3개나 1개냐 차이이다. ICM 20948이 1개인데.. 1개에서 모두 다 측정하다보니.. 비싸다.)
그렇기에 잘 선택해야한다. 근데 생각해보면.. 지자기 센서는 주변 자석에 영향을 받는다.. 아마 영향은 안받을꺼라고 생각되는데.. 모터나 주변 MPU, MCU 때문에 오차가 있을 수 있다고 생각된다.. 지자기 센서는 기존 로봇에는 없어서 사실 상관은 없지만.. 어디가 동쪽인지 북쪽인지 알아서 자동으로 어느 위치에 가야할지.. 알 수 있어서 좋을 것 같기는 하다.. 근데.. 센서에 영향이 있다면 달아도 소용이 없기 때문에.. 이건 포기해야할 것 같다..
그렇기에 일단 MPU6050으로 결정하는걸로!
MPU6050의 경우
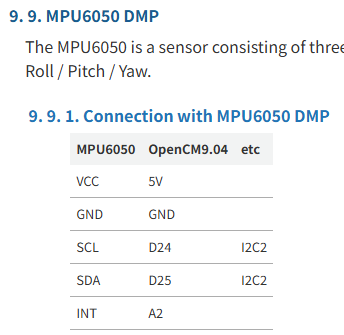
저기 위에 걸린 링크에 설명이 되어있다.
그럼.. 다음으로..!
부저
부저다. 부저는 딱히 필요는 없을 것 같긴 한데.. 필요할 수도 있을 것 같긴 하다.
CM 740에 기본적으로 부저가 달려있다.. 그래서 아마도 필요하긴 할 것 같다. 뭐 전원 들어오면 들어왔다고 말할 때도 필요할 것 같긴 하니깐.. 아마 필요하지 않을까? 라고 생각된다.
부저의 경우 위에 링크에 있던건데..
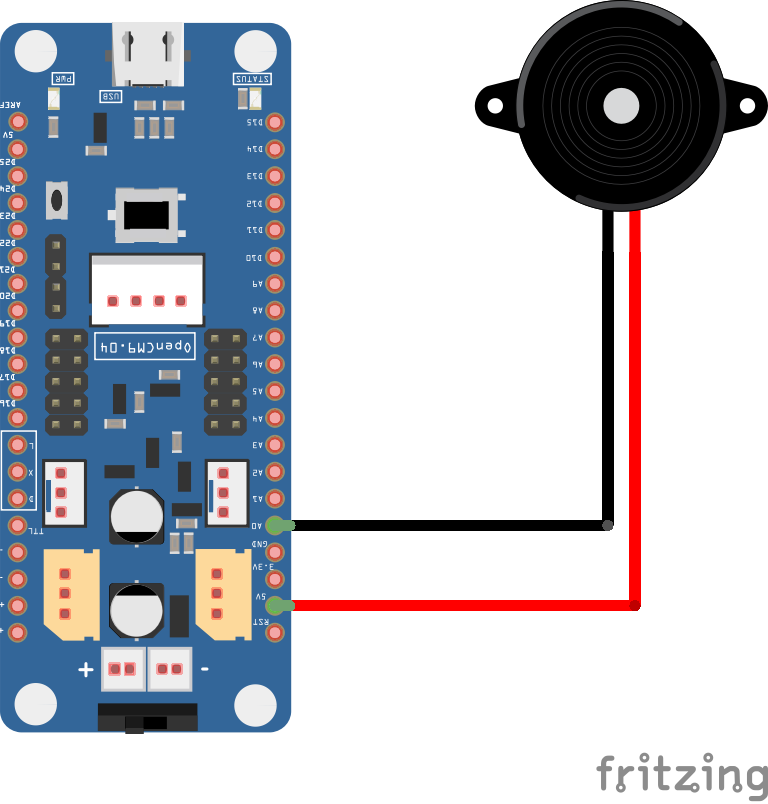
이렇게 달면 된다고 한다..
가능하다면 PCB로 하면 굉장히 깔끔할 것 같긴 하다..
뭐 저건 저렇게 하고 또 다음으로
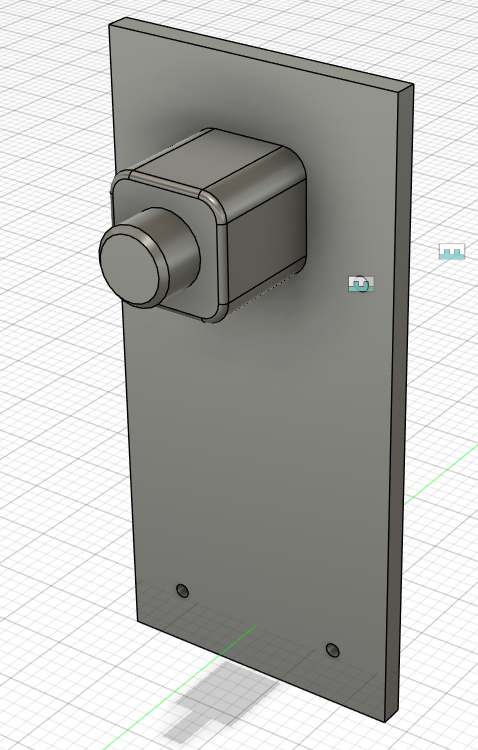
스위치
스위치이다. 스위치의 경우 Darwin OP 2 뒤에 달린 스위치와 연결해서 전원을 부팅하거나 할 것이다.
일단 OpenCM9에선 전원 스위치를 연결하기 쉽게 되어있다.
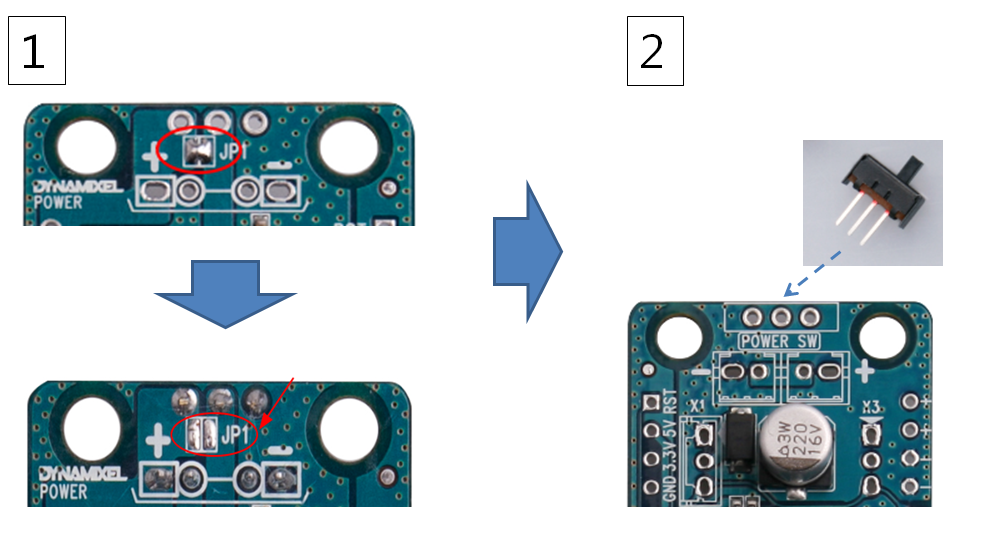
또 그 링크에 설명되어있는건데.. 이렇다. 기존 스위치를 떼고 3개 스위치를 연결하면 전원 선은 계속 연결한 상태에서 전원을 껐다 켰다 할 수 있다.
근데 저 방법도 있긴 하다만.. 지금 생각해보면.. 그냥 스위치 쪽에 어차피 배터리하고 전원 이런걸 2개 다 연결하는 방식이니깐.. 그 스위치 쪽에서 아예 전원을 공급하거나 안하거나로 해버리는게 더 나을지도 모르겠다..
만약 이렇게 되면 OpenCM9에는 전원을 계속 공급하도록 스위치를 켜야하는데.. 그렇게 되면 뭐 충격으로 꺼질 수도 있고.. 하니깐 저 위에 사진대로 JP1를 합선시키면 될 것 같다. 합선 시키면 계속 켜져있게 된다고 하는 것 같다.
다음은..
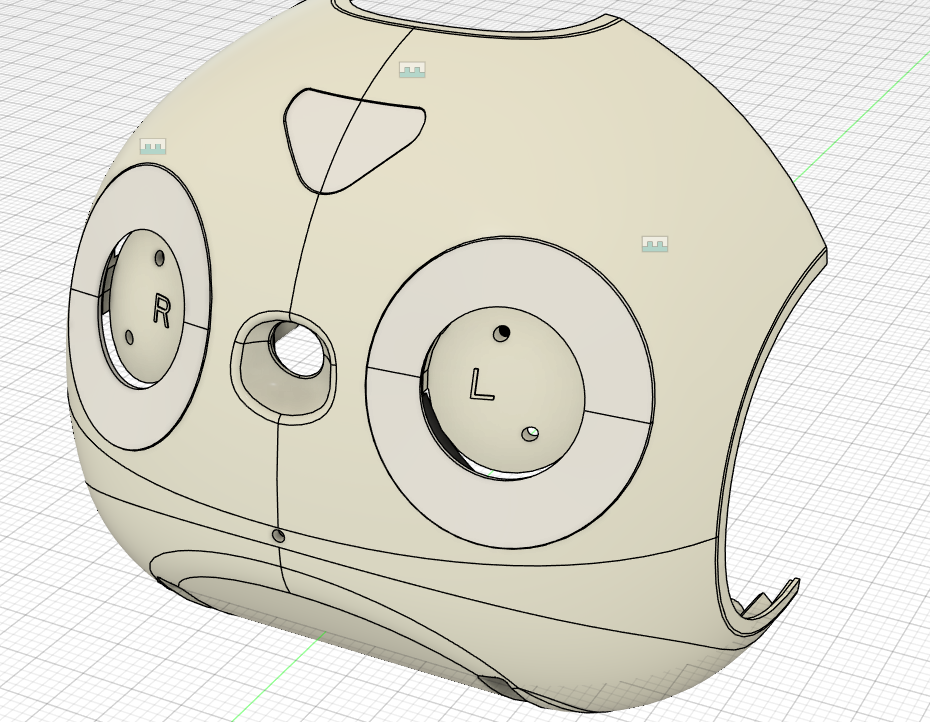
마이크 & 스피커 & 카메라
마이크와 스피커, 카메라이다!
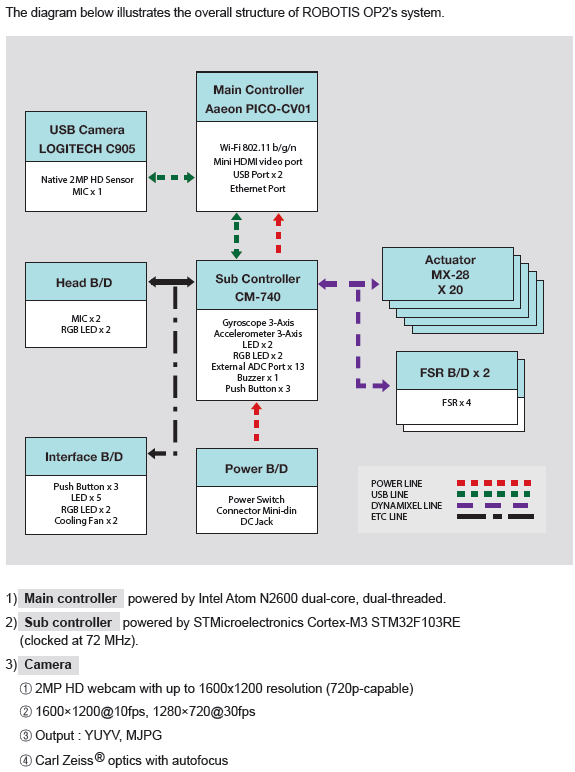
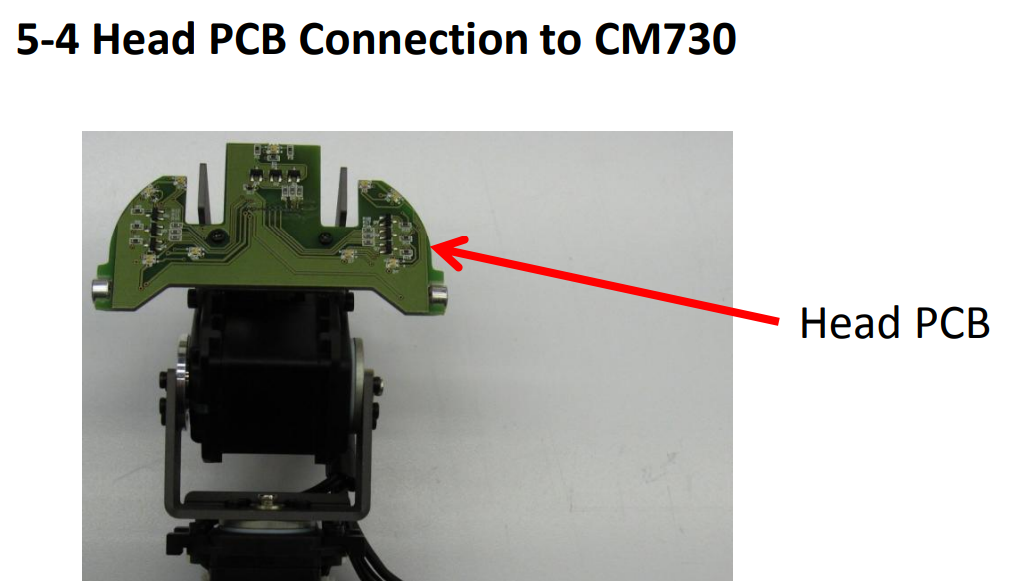
우선 마이크의 경우는 머리에 있고 CM 740에 연결되어있다는데.. 왜 PC하고 마이크하고 연결을 하지 않은건지는 모르겠다.. 카메라에 달린 마이크는 이용하는건가..?
근데 왜 CM 740에 마이크를 연결한지는 모르겠다.. 음성 인식을 하거나 할려면 CM 740 보다는 PC에 하는게 좋았을텐데..
아마도 추측이지만.. 마이크가 머리에 있는걸 보니.. 간단한 Robi 같은 음성인식이거나 아니면 방향 인식 때문에 한게 아닐까 싶다..
만약 그런 이유라면.. 나도 방향 인식이나 간단한 인식 용도로 머리에 2개의 마이크를 달고 인공지능이나 여러 음성인식을 위한 마이크 1개를 카메라 쪽에 달아두는게 나을 것 같다.
라즈베리파이 같은 PC는 실시간 처리가 어려워서 마이크 방향 인식 하기에 부적합할테니..
그럼.. 다음으로 스피커이다!
스피커의 경우는 가슴쪽에 한개가 있던걸로 알고 있는데.. 이건 어차피 라즈베리파이의 오디오 잭에 연결할꺼니깐.. 여긴 그냥 넘어가도 될 것 같다.. 스피커는 작은걸로 아무거나 전력에 맞는걸로 할 듯 하다.
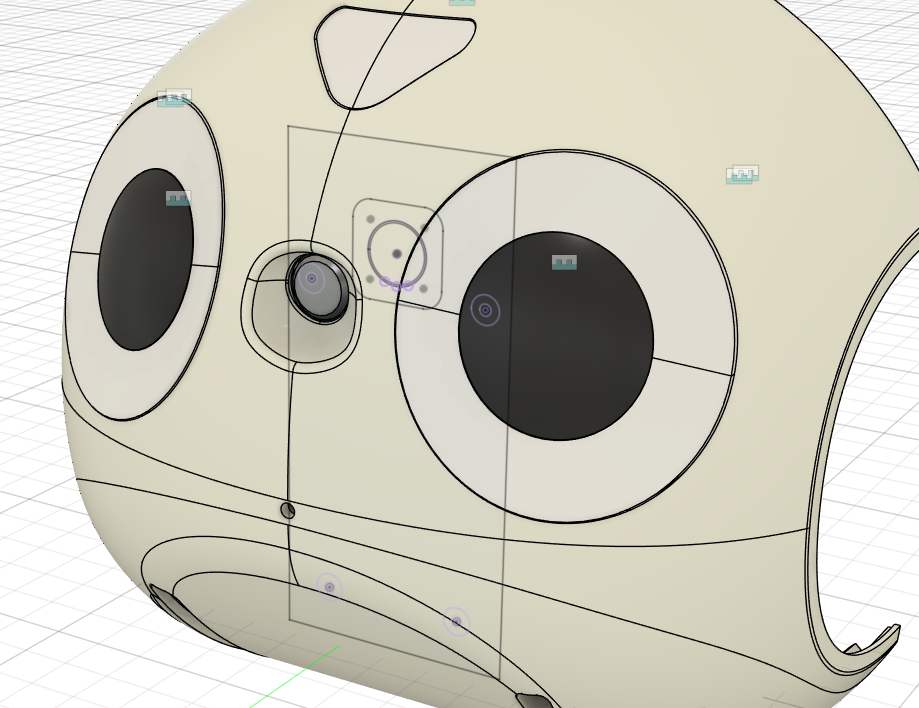
그럼 이번엔 카메라인데..
카메라가 가장 큰 문제이다..
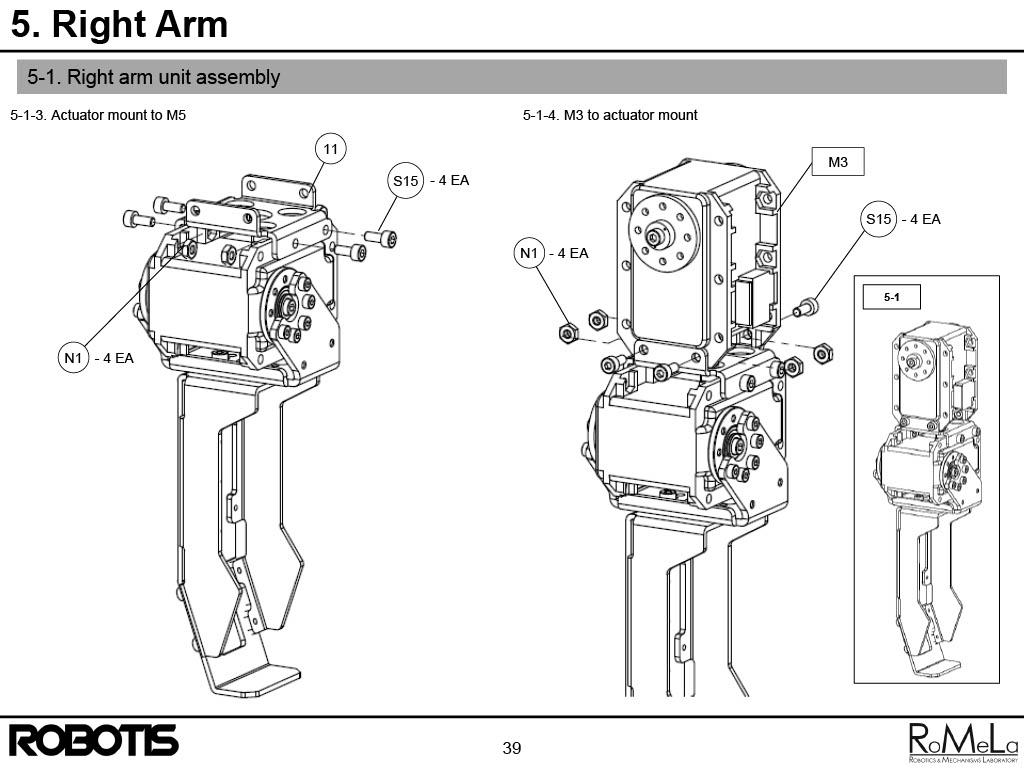
일단 위 사진을 본다면 카메라의 경우 로지텍의 C905를 사용하는데..

이걸 사용한다고 한다.. 아마도 이거를 분해해서 머리쪽에 장착하는 듯 하다..
저런 카메라는.. 현재로선 구하기가 어렵다. 그래서 저 카메라는 못 사용하니.. 다른걸 찾아야 하는데.. 비슷한 크기의 카메라가 한쪽에 몰린 카메라를 사용하거나.. 그냥 라즈베리파이 카메라를 사용하거나.. 해야할 것 같다.. (라즈베리파이 카메라는 선이 특이해서.. 제대로 될일은 없겠다만..)
암튼 이것도 고민을 좀 많이 해야겠다..
잘 들어갈만한 카메라가 없을려나...
뭐 이건 나중에 고민해야겠다..
그럼 다음으로..
LED & 버튼 & 쿨링팬
LED나 버튼, 쿨링팬들인데

버튼은 3개, LED는 7개, RGB LED는 9개? 였던가이다. (메인 PC 파워 버튼의 경우 굳이 필요없을꺼 같다. 라즈베리파이는 전원선만 공급하면 바로 켜지니깐..)
뒷쪽에 버튼 3개는 OpenCM9에 어떻게든 연결하면 될 것 같고.. LED도 연결 잘 하면 될 것 같은데.. 나는 아마도 RGB LED로 할 것 같다.. 정보 표시용 말고도 추가적으로 화려한 LED 들도 표시해보고 싶기에.. 하는데 만약 그렇게 되면.. RGB를 표현하는데 핀 3개 * LED 갯수 7개를 해서 총 21개의 LED 핀이 필요하게 되는데.. 이 경우 OpenCM9에 모두 연결하는건 아마 힘들것이다..
그래서 나는 아마도 WS2812B 이런걸 사용하지 않을까 싶다.
1개의 선으로 모든 RGB LED를 제어하는게 가능해지니깐.. 저걸로 할 것 같다.
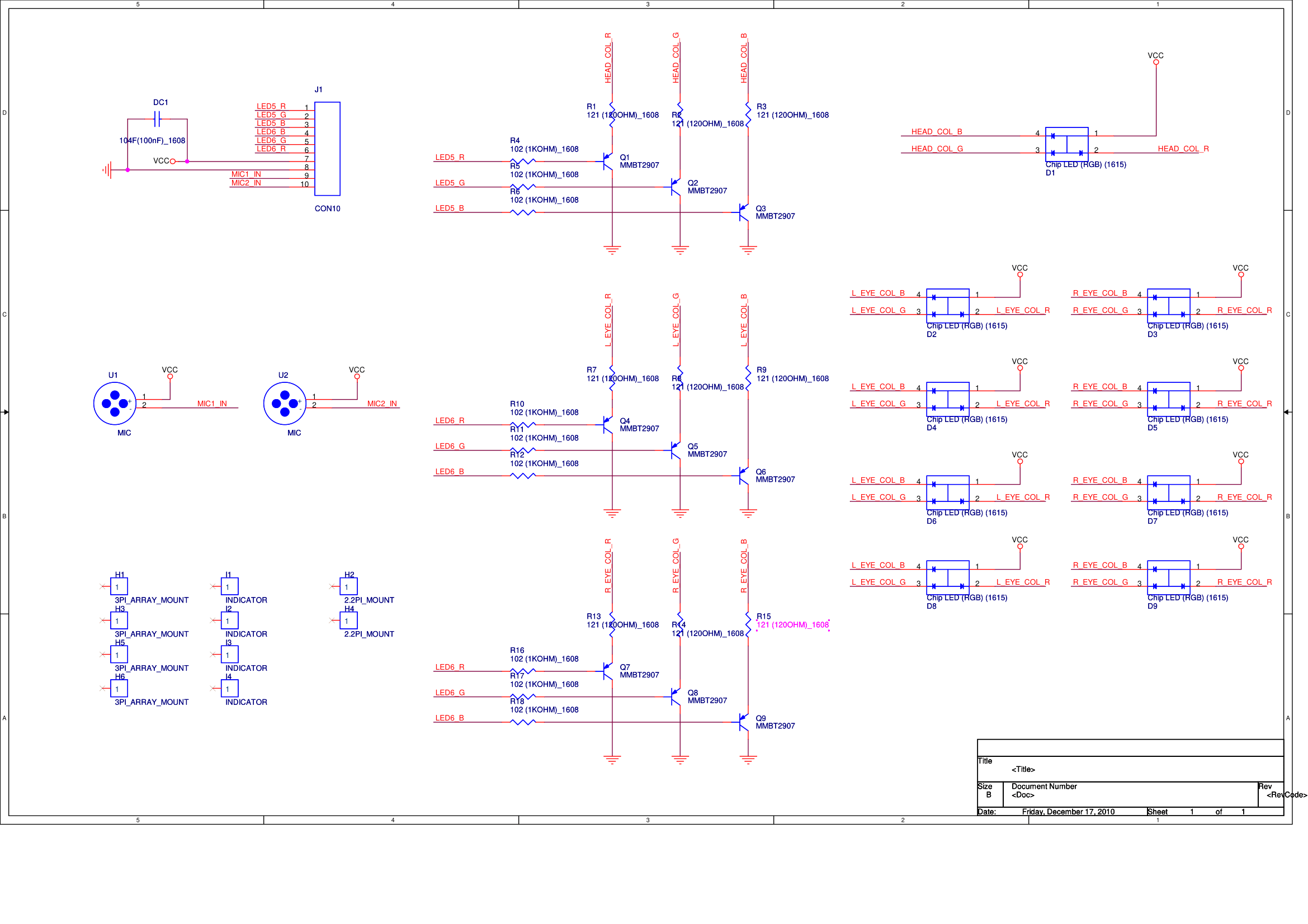
머리의 LED는 내가 알기론 한쪽 눈에 4개의 LED가 있고 하나의 전력으로 연결하고 해서 총 LED 갯수는 9개이고 제어 가능한건 3개일텐데..
이것도 마찬가지로 한쪽 눈알에서도 개별적으로 모든 LED를 각각 제어해서 회전하는 LED나 이런걸로 해보고 싶기도 하니 이것도 마찬가지로 WS2812B를 사용해서 할 듯 하다..
만약 그렇게 되면.. 필요한 선은 2개!
뒷판에 연결할꺼 1개와 머리에 연결할꺼 1개로..
추가로 쿨링팬은 그냥 PWM에 연결하면 될 것 같고..
제일 걱정은 과연 이 모든걸 연결했을 때.. 전력이 충분할까이다.. 모터까지 함께 구동해야하니깐.. 흐어어...
근데

오디오 라인은 어디에 꽃으라는거지..? 아래쪽에 안보이는 곳에 있나..?
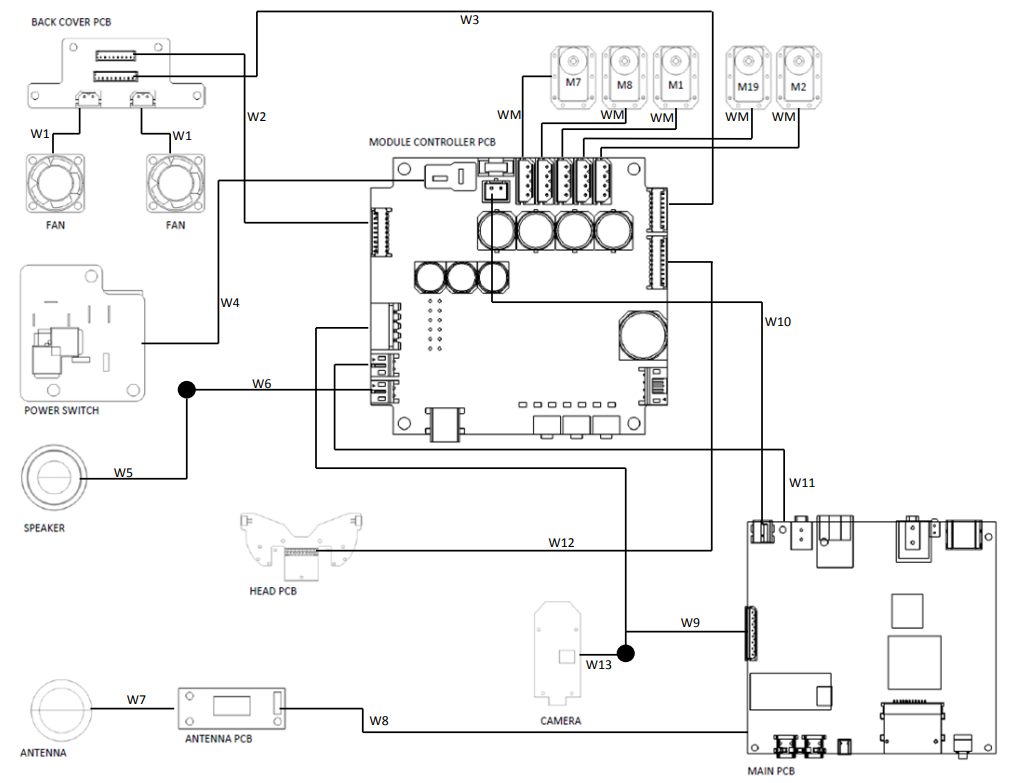
스피커와 카메라가 도데체 어떻게 연결되는거지..?
그리고 마지막으로
ROBOTIS OP2-FSR Set
ROBOTIS OP2-FSR Set 이다.
https://www.dynamixel.com/shop/item.php?it_id=902-0059-001
로보티즈
자율주행로봇 전문기업, 서비스로봇 하드웨어 및 소프트웨어 솔루션 공급, ROBOTIS 집개미&일개미, DYNAMIXEL, 터틀봇3
www.robotis.com
http://machinedesign.jp/robot/products/darwinop.html
グローバルロボット関連|有限会社杉浦機械設計事務所
DARwIn-OPは小型LinuxPCとHDカメラをはじめとした各種センサーを搭載し、演算、センシング能力をもった「歩くコンピュータ」です。Dennis Hong博士率いるバージニア工科大学RoMeLa (Robotics & Mechanisms
machinedesign.jp
이거인데.. 이거 같은 경우 장착할 수도 있고.. 안할 수도 있는 것이다.
일단 장착할 수도 있으니깐.. 핀은 만들어둬야 할 것 같은데..
저거같은 경우.. 자이로 3축, 가속도 3축, 압력센서, 온도센서로 되어있는 것 같다.
걷거나 뛸 때 필요할 듯 하지만.. 저걸 할려면 또 PCB를 만들거나 추가적으로 처리해야할꺼가.. 많아지니깐.. 저거는 핀만 만들어두고 해야할지는 나중에 고민해야할 것 같다..
그렇기에 일단 적어만 둔 것..!
PCB
다음으론 PCB인데..
아직 PCB를 만들지도 주문하지도 않았지만..
검색하다보니 좋은게 있어서.. 나중에 볼겸 적어놓는거다.
https://jlcpcb.com/help/article/PCB-Panelization
PCB Panelization
Some customers would like to merge more than 1 PCB in the same Gerber. We know you want to save money but this may make it hard to cut the board outline and more importantly, this will take a lot more time to pick up and package the PCB. Although by doing
jlcpcb.com
https://jlcpcb.com/blog/pcb-panelization-tips-and-techniques
PCB Panelization Explained: Tips and Techniques
PCB Panelization Explained: Tips and Techniques PCB panelization is a crucial process in modern electronics manufacturing, designed to streamline production and reduce costs. In this way smaller circuit boards are produced in bulk and joined to one another
jlcpcb.com
저번에 게임 컨트롤러 만들면서 PCB를 주문해봤었는데..
그때 주문할 때.. PCB 1장에 2개씩 했으면 비용이 더 적었을 텐데.. 따로 해서 비용이 더 나온적이 있었다..
그래서 더 저렴하게 만들 수 있도록 PCB 여러개를 하나로 합쳐서 저 위 링크에 있는 것 처럼 주문을 해야할 것 같은데..
암튼 저렇게 해서 PCB를 싸게 만들어야 할 것 같다.
어쨋든 그렇다..
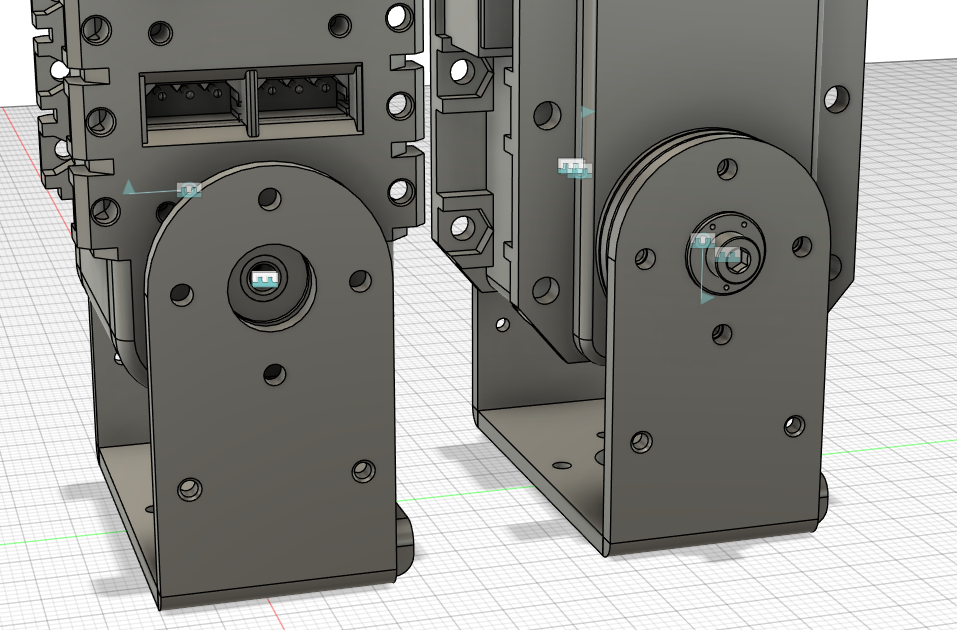
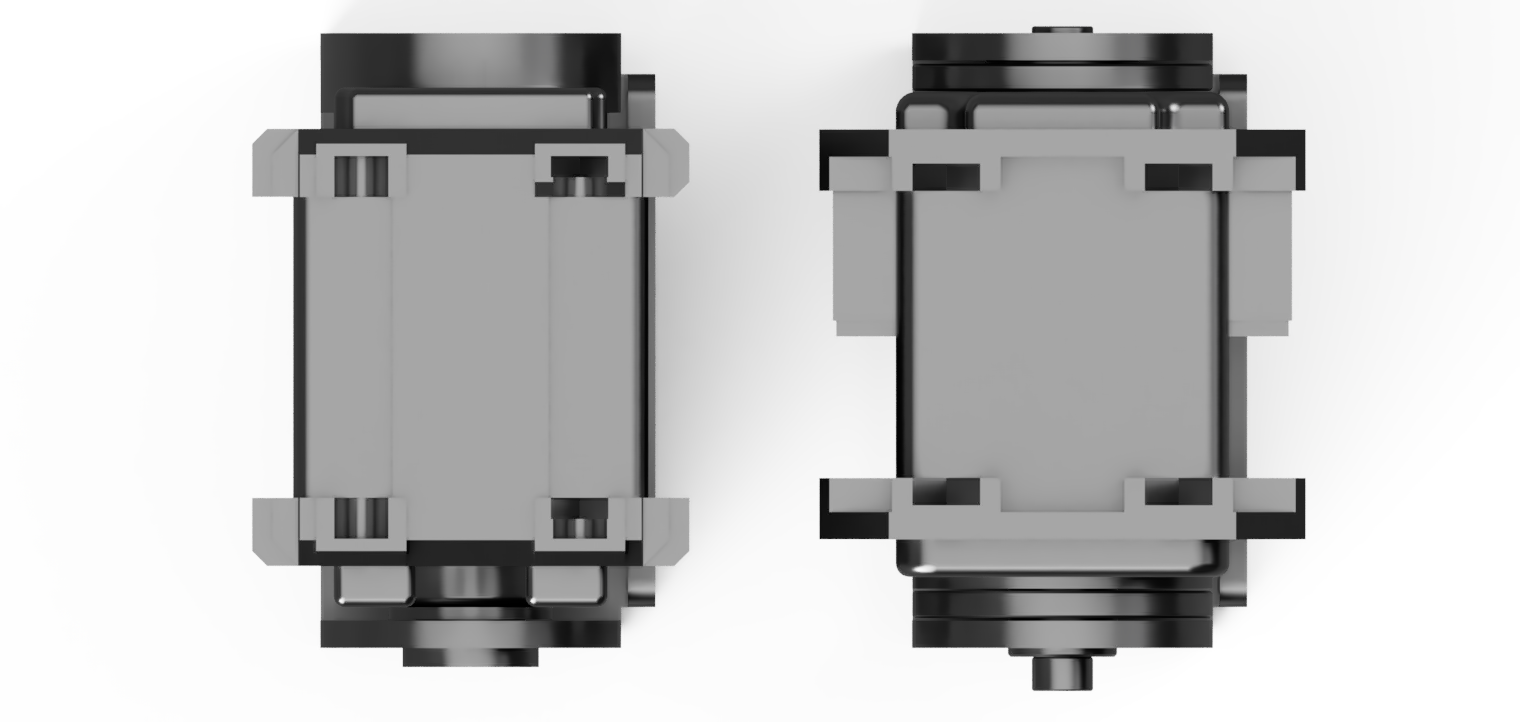
그리고 모터 2개도 구매해야하는데.. 52,800원인가 그렇던데.. 개당..
이전에는 3만원인가 말했던 것 같은데.. 그 때보다 가격이 올른건가..? 뭐 그냥 저걸로라도 사야지 뭐..
어쨋든.. 여기까지 조사를 했다..!!
점점 더 만들 수 있을지 고민이 되어간다..!!
돈만 많고 기술도 충분하다면 만드는데 충분할텐데.. 그러지가 않아서.. 시간도 부족하고..
좀 어려울 것 같다만.. 일단 최대한 도전해보겠다..!!
'로봇 > ROBOTIS DARWIN OP 2' 카테고리의 다른 글
| Darwin OP 2 제작 도전 [3. 컨트롤러 결정 - 1] (0) | 2025.05.04 |
|---|---|
| Darwin OP 2 제작 도전 [3. AX 12A 가상 조립 - 모터 비교] (0) | 2025.04.30 |
| Darwin OP 2 제작 도전 [2. 가상 조립 - Cover] (0) | 2025.04.30 |
| Darwin OP 2 제작 도전 [2. 가상 조립 - Full Assembly] (0) | 2025.04.30 |
| Darwin OP 2 제작 도전 [2. 가상 조립 - Head] (0) | 2025.04.30 |