
이번엔 Right Leg 부분이다..! 이번껀 미리 확인을 해봤는데.. 다행히 이전 처럼.. 끼우기가 힘든 곳은 별로 없는 것 같다..!
그리고.. 다른 설명서 부분도 봤는데.. 이 정도라면.. 충분히 프레임만 수정하면 이건 무조건 가능할 것 같다고 생각되는 정도이다..! (아마도..)
아무튼!
이번 부분을 시작하기 전에.. Flange Bearing이 내가 이전 글에서 적지 않았다는 것을 찾았다.. Flange Bearing은 이 부분에서 사용되게 되는데.. 이전 글을 적을 때 같이 찾지 않았었다.. 그래서 방금 이 파일을 찾느라 조금 힘들었다..

일단 이렇게 생겼다..
베어링하고 혼쪽에 도면이 있는지 확인해봤는데.. 베어링이라면서 없다..
그래서 다른 곳을 다 찾아보니.. 하나 찾았다..
Frame 도면 쪽에서 찾았는데.. 2개 모양이 저 작은 사진으로 봤을 때 가장 비슷했다.. 그런데 보면 2개 중에 뭔지를 찾아야 하는데.. 뭐 적혀있다. MX 28이라고.. 그리고 다른 부품들 이름을 봤을 때 대부분 07로 끝나는데.. 그걸 본다면 알 수 있다는 것..!
암튼 저 부품은.. https://www.robotis.com/shop/item.php?it_id=903-0163-100
FR07-F101K Set
MX-28 전용 프레임
www.robotis.com
여기에서 판매되고 있다.
그리고 도면 파일은 찾았으니.. 다운로드 해서.. 라이브러리에 넣어둔다!
일단 겉으로 보기에는 모양이 똑같다!
암튼.. 이번 부분은.. 대부분 설명서대로 진행할 수 있을 것 같은 부분들만 있다..!
그래서 다행이다..! 그렇기에 실제 조립과 다르게 하는 부분들만 적을 것이다..!
암튼 이번 파트의 설명서!
|
|
|
|
|
|
 |
 |
 |
이번 파트 부분에서는 대부분 조립대로 하면 되는거라서 딱히 말할 곳은 없지만.. 몇가지 않좋을 수 있는 부분이 있다..
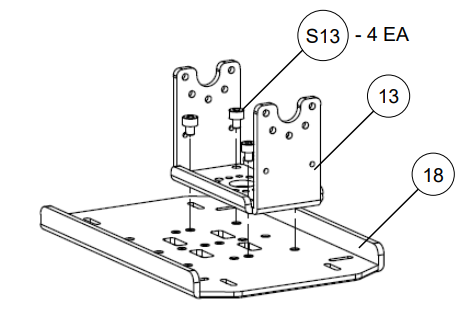
일단 이 부분은.. 로봇의 발에 해당하는 부분이다.. 저기에 보면 나사를 넣고 반대쪽에서 너트로 고정하지 못한다..
만약 고정해버리면 분명.. 긁힐 것이 뻔하니..
그래서 저 부분은 만약 만든다면.. 인서트 너트로 해야할 것 같다..
저정도는 인서트 너트로 하면 잘 붙으니깐 오히려 좋을 수도 있을 것 같다..!
그리고 하면서 특이한게 보이는데.. 부품 목록을 봐도 그렇고.. 하나 파워 스위치 쪽 부품 빼고는 전부 LR 구분이 없다..!!
발판을 봐도 왼쪽 오른쪽에서 가능하도록 여러개 뚫려있다..
바이올로이드 조립할 때도 느낀거긴 하지만.. 양쪽에서도 다 쓸 수 있도록 만드는 것.. 뭔가.. 대단하고 신기하다고 느낀다..
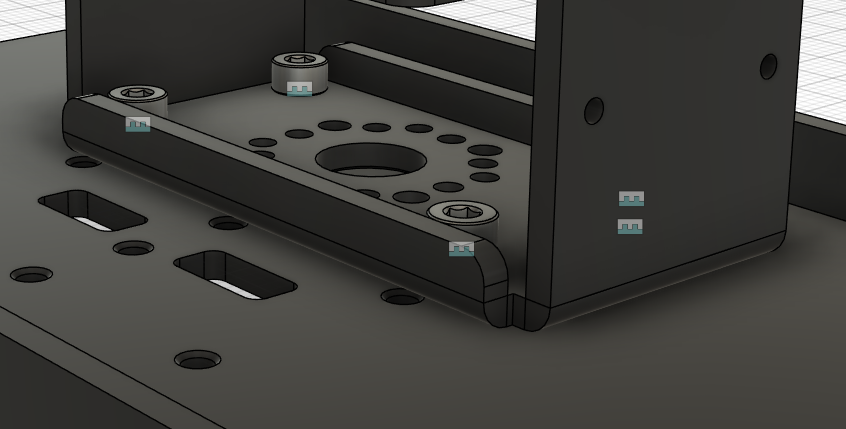
그리고 이런 부분도 있는데 이 부분도 마찬가지로 보면 너트로 고정하지 않는다..
그래서 이 부분은 도데체 어떻게 해야할지 고민이다.. 이쪽 부품은 작고 저렴하니깐.. 그냥 구매하는 것도 방법일 것 같고..
안되면 여기도 인서트 너트로 되게 만들어야 할 것 같다..
그리고..
이번엔 여기에서 문제가 생겼다..!
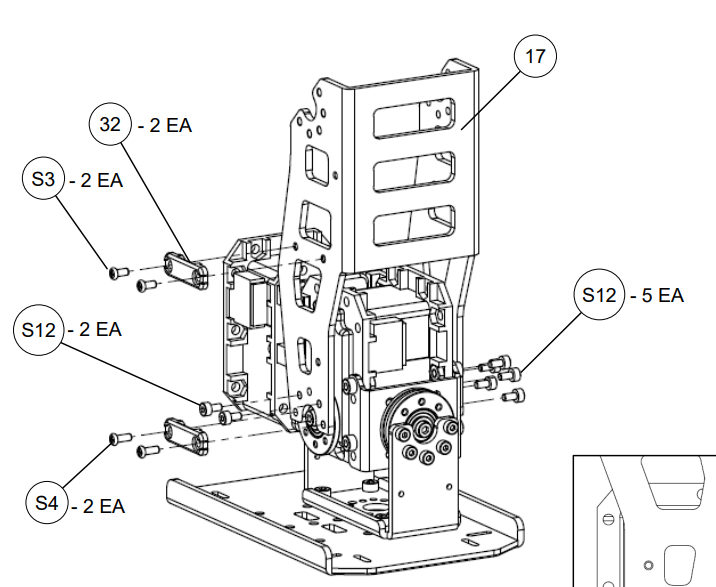
저 32번.. 아마 내가 기억하는걸로는 케이블 고정할 때 쓰는걸로 기억하는데.. 내가 저거에 않좋은 추억이 있는게.. 바이올로이드 조립할 때 저걸 프레임에 끼우는데 바이올로이드는 플라스틱이다.. 그래서 한번 조립하면.. 플라스틱이 갈려있다.. 그래서 항상 안끼워지고 풀려버려서 굉장히 짜증났던 기억이 있는데.. 철제라면 진짜 좋을지도..
아무튼 저걸 찾아야 한다..
일단 먼저 상품을 찾아봤는데.. 상품 목록에는 분명 있다. https://www.robotis.com/shop/item.php?it_id=903-0182-000
다이나믹셀 Cable Holder FP04-F55 20pcs
다이나믹셀과 프레임에 케이블을 고정
www.robotis.com
그런데 문제는 저기에는 왜 도면이 없는거지.. 도면이 분명 있을텐데.. 그래서 도면 다운로드 사이트에 보니깐..

여기에 있었다..!! 그래서 저걸로 적용!
그리고 끼워보는데..
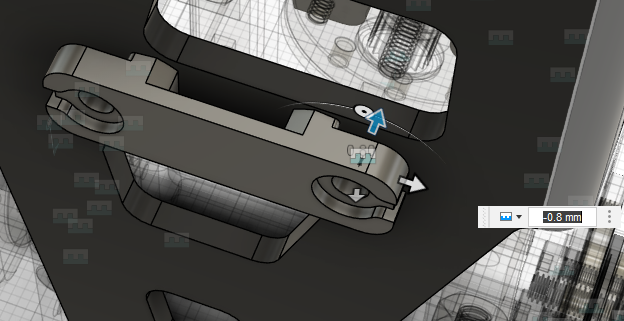
저게 원래 고무재질이다. 그래서 저기 안쪽으로 튀어나온 것 때문에 강하게 끼워버리면 휘면서 케이블 공간이 넓어지게 되어있다.. 그런데 가상에서는 그렇게 할려면 어려우니깐.. 나는 임시로 -0.8mm를 뒤로 하고 합쳐서 되었다..!
물론 저기에도.. 너트로 고정하는 방식이 아니기 때문에.. 프레임이 철제가 아닌 이상.. 고정하기가 어렵다..
그래서 이 부분도 인서트 너트로 고정하는 방식으로 바꿔야 할 것 같다..
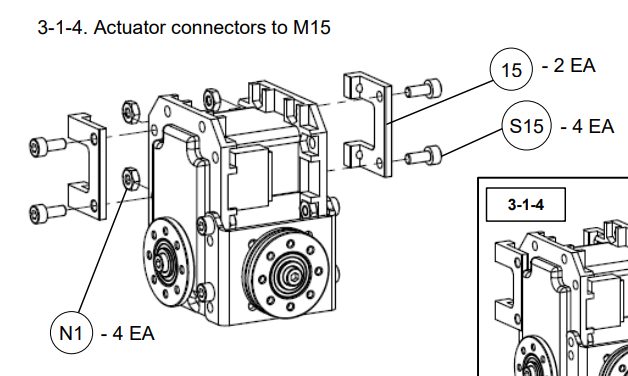
이번엔 여기..
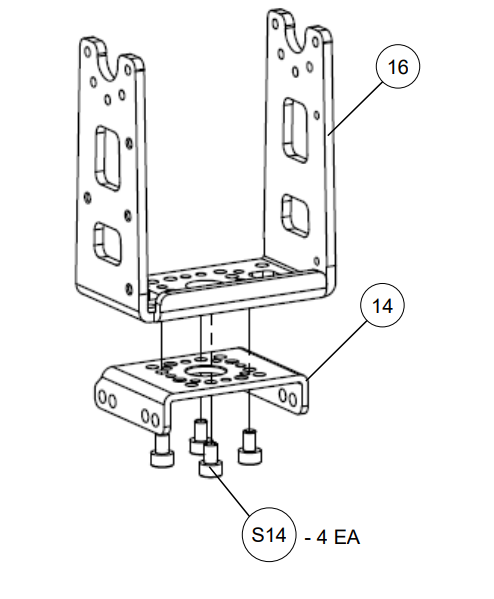
이 부분이다.. 사진에서 어느 구멍에 끼우는지도 잘 안보이고.. 저기에서도 너트 없이 프레임에 끼우는 방식이다..!!!
그렇기 때문에.. 여기에서는 S15인 M2.5 * 6mm를 이용해서 너트와 함께 끼운다..!
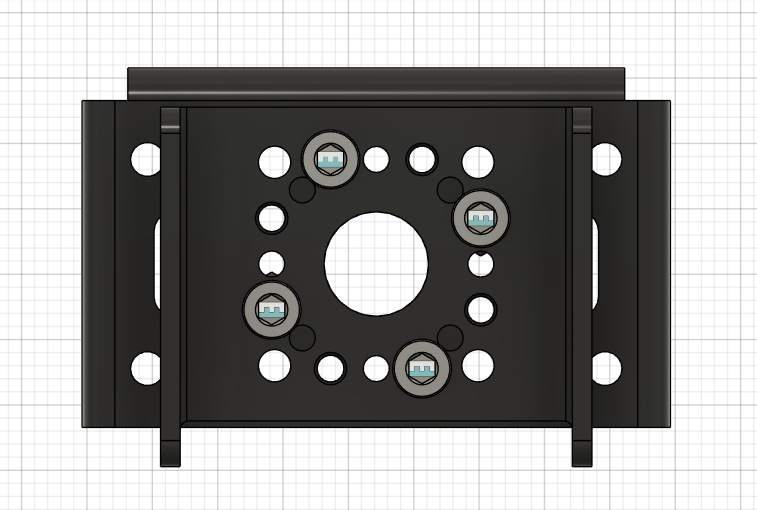
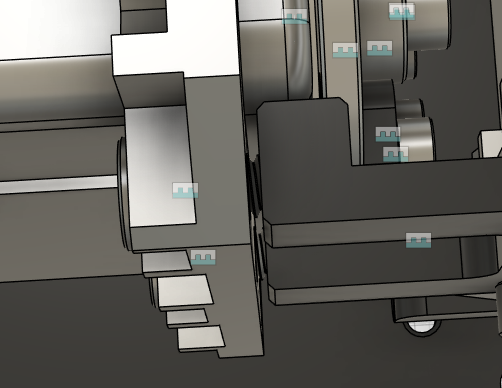
일단 난 최대한 확대하면서 확인해본 결과.. 저 부분에 연결하는 것으로 추측되기 때문에.. 이런식으로 연결했다.
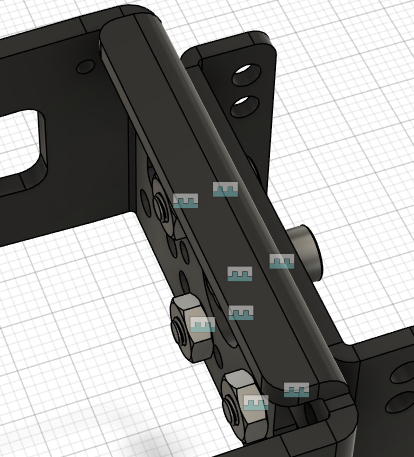
마찬가지로 반대쪽은 너트!
로봇이 움직일 때.. 너트를 건들 수도 있다고 생각은 되긴 하는데.. 아마 위 사진 처럼 약간의 덮개 같은게 있는데.. 거기까지는 아마 괜찮지 않을까.. 추측 중.. 뭐 괜찮겠지..
그리고.. 나머지도 다 조립해주면?!!
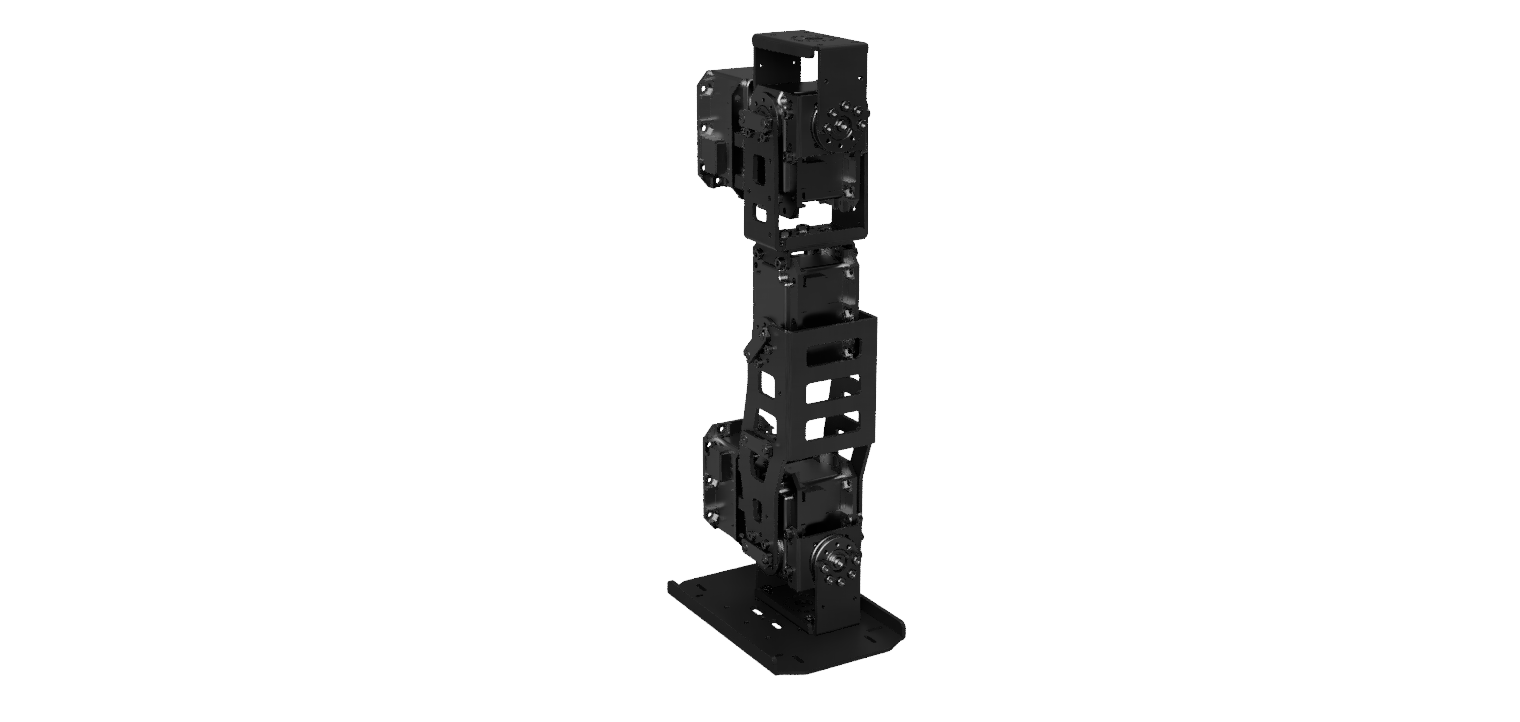
이렇게 조립이 끝난다!
솔직히.. 이번 조립은.. 너무 어려웠다.. 제일 양이 많은 것 같다.. (반대쪽은 어떻게 하지.. 복붙 하고 싶은데..)
뭐.. 어쨋든.. 가장 시간이 오래 걸리고.. 제일 어려운 다리 파트였던 것 같다.. 다리의 관절은 많다보니.. 내가 예전에 바이올로이드 조립을 했을 때도.. 이 많은 관절 때문에.. 제일 시간이 오래걸리기는 했었다..
아무튼.. 이번 것도 끝..!
'로봇 > ROBOTIS DARWIN OP 2' 카테고리의 다른 글
| Darwin OP 2 제작 도전 [2. 가상 조립 - Left Leg] (0) | 2025.04.03 |
|---|---|
| Darwin OP 2 제작 도전 [2. 가상 조립 - Lower Chest] (0) | 2025.04.01 |
| Darwin OP 2 제작 도전 [2. 가상 조립 - Upper Chest] (0) | 2025.04.01 |
| Darwin OP 2 제작 도전 [1. 자료 조사] (0) | 2025.04.01 |