이제부턴 가상으로 조립을 해볼 것이다..!
이걸 하는 이유는 MX 28T 모터를 AX 12A로 대체하기 전에 구조나 원리를 파악하며 어디에서 수정해야할지 알아야 하기 때문이다.
암튼 그런 이유로 일단 필요한 부품들을 확인한다..!
일단 이전 글에서 다운 받았던 파일에는 MX 28T 모터에 관련된 부품들은 없다. 프레임이나 스킨 뿐..
그리고 필요한 나사들이나 이런 것들도 없다..
그래서 그에 대한 것들을 일단 다운할 것이다..! 이게 조립하는 것 보다 제일 어려웠던 것 같다..
필요한 부품 3D 파일 다운로드

일단 조립 메뉴얼 PDF를 보면 이곳이 있다. 여기에 있는 전부는 따로 파일로 제공되지 않기 때문에 따로 파일을 찾아서 다운로드 해야한다. 그리고 나중에도 얘기하겠지만.. 이 설명서는 Darwin OP 1 설명서이다. 그래서 OP 2랑은 약간 다른 점이 있다.
암튼 필요한 파일 중에서 볼트, 너트 들을 https://www.mcmaster.com/ 여기나 구글에 검색해서 찾아보았다.

그렇게 해서 이렇게 필요한걸 다운로드 했다. 참고로 저기에 SU1, SU2, SU3는 아무리 찾아봐도 내가 원하는 규격이 없어서.. 그냥 만들기가 쉬운거라 Fusion 360으로 만들었다. 그리고 S1 저거는.. 무슨 나사인지 적혀있지 않고.. 작은 나사이다 보니.. 잘 없다.. 그래서 그냥 일단 Hex 나사로 다운로드 하기는 했다..
암튼 저것보다 더 중요한게 있는데.. 모터에 장착할 베어링과 혼 이다.. 기본적으로 Robotis에서 제공하는 MX 28T의 3D 파일에는 혼과 베어링이 없다.. 그래서 직접 추가해야한다..
그런데 이게 제일 찾기가 헷갈리고 어려웠다.. 적혀있지를 않아서..
일단 최대한 찾아보면..
ROBOTIS e-Manual
emanual.robotis.com
여기에 어떤 베어링과 혼이 사용되었는지 확인할 수 있다.
https://www.robotis.com/shop/item.php?it_id=903-0164-000
HN07-N101 Set
RX-24F/28/MX-28 전용 기본 혼Horn)
www.robotis.com

https://www.robotis.com/shop/item.php?it_id=903-0165-000
HN07-I101 Set
RX/MX-28 전용 아이들러 베어링 세트
www.robotis.com

그리고 상품 페이지에서 그 제품들의 부품을 확인해보면 저렇게 어떤 부품들이 사용되었는지 알 수 있다.
그리고 그 파일들은 https://www.robotis.com/service/downloadpage.php?ca_id=7020
로보티즈
자율주행로봇 전문기업, 서비스로봇 하드웨어 및 소프트웨어 솔루션 공급, ROBOTIS 집개미&일개미, DYNAMIXEL, 터틀봇3
www.robotis.com
여기에서 찾을 수 있다. 베어링 쪽에도 다운로드 할 수 있는게 있으니.. 거기도 확인해야한다..
암튼 저 구성품들을 보고 필요한 파일들을 찾아서 다운로드 하면 된다. 추가적으로 BEARING MF106ZZ 파일은 찾을 수가 없는데.. 이건 그냥 웹페이지에서 다운로드 하면 된다..
그렇게 해서 다운로드 해보면
이렇게 얻을 수 있다..!
그리고 Fusion에 모두 업로드 한다.. 그러면 준비 완료!
Upper Chest 가상 조립

일단 모터에 혼과 베어링 부터 장착한다.
 |
 |
이렇게 장착한다. 조립하는건 딱히 어렵지 않아서.. 대충 대충 넘어갈 것이다.
암튼 베어링과 혼 쪽에는 돌아가게 해야하는 부분은 있어서 그곳은 회전으로 돌아가게 했다.
그리고 이제 Upper Chest 부분을 조립한다..! 조립할 때는 전부 설명서와 똑같이 나사와 너트를 이용해서 조립을 하고 추가적으로 모델링이나 필요한 것들이 있을 때만 그거에 대한 것들을 설명할 것이다..!
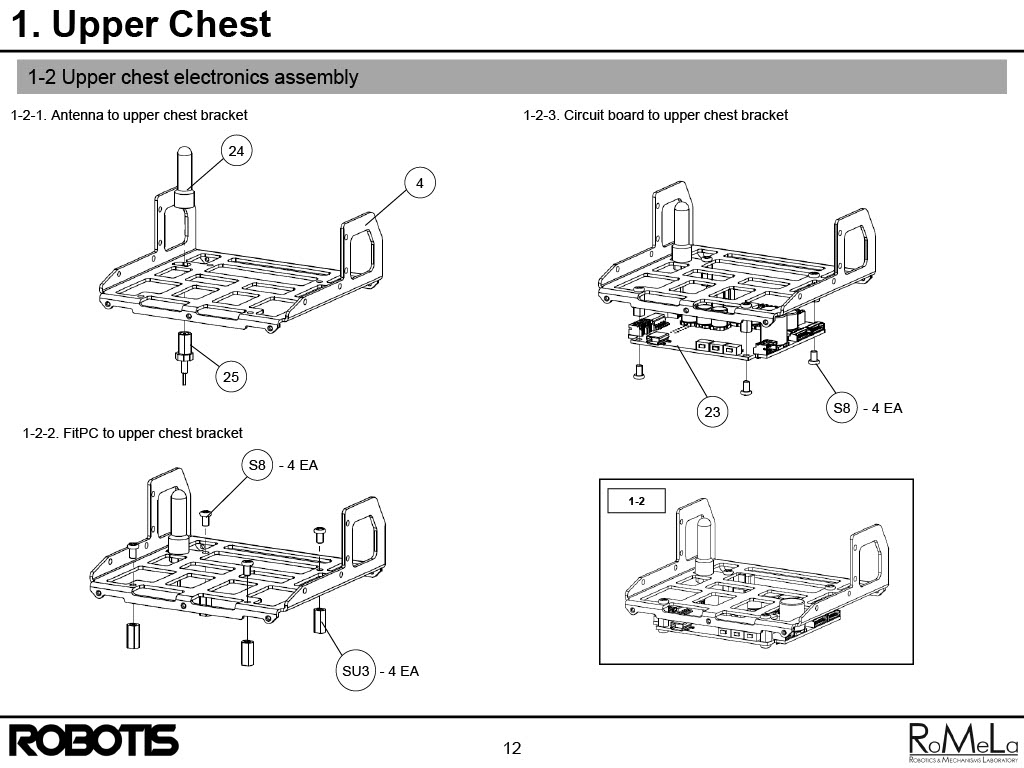
암튼.. 설명서는!
 |
 |
 |
 |
 |
이렇다.
굉장히 간단하다..
암튼 저것에 대한걸 전부 조립하게 되면.. 이렇게 나온다..!

보이는 것 처럼 나사와 너트들도 전부 장착했다. 장착할 때 설명서에는 그림으로만 나오는게 하나 있는데.. 3개의 모터에서는 모터의 베어링 쪽은 사용되지 않으므로 베어링 부분은 제거해야한다. 하지만 Fusion에선 이미 조립한걸 제거할려면 귀찮은걸 해야해서 그냥 모습만 안보이게로 바꿨다.
암튼 여기에서 따로 한 것은.. 서브 컨트롤러이다. Darwin OP 2에는 CM 740 이라는 컨트롤러를 사용하는데.. Darwin OP 1은 CM 730을 사용한다. CM 740과 CM 730의 차이는 성능 차이도 있지만 모양 차이도 있다.
 CM 730 |
 CM 740 |
이렇게 모양이 다르다. 그렇기에 설명서에 보면

이렇게 1-2-2 그림에서 보드 끼우는 곳이 넓게 보이는 반면.. 실제로는

좁다. 암튼 그 이유는 위에서 말한 것 처럼 보드의 크기가 달라서 그렇다.
그리고 추가적으로 센서나 보드나 이런 것들은 3D 파일이 없다..
그런데 나는 최대한 비슷하게 만드는걸 목표로 하기 때문에 그냥 대충 크기 맞춰서 만들었다.

이렇게..

그렇게 해서 이렇게 2mm로 해서 만들었다.
그리고 안테나와 안테나 커넥터 들도 있는데.. 그거는 만들기가 어렵기도 하고 안쪽이라 잘 안보이기에 그냥 만들지는 않았다.
아무튼 그렇게 해서 Upper Chest 부분은 완성했다...!!

암튼.. 그렇게 해서 완성하면 이렇게 나온다..
물론 모터에 연결된 부품들도 같이 회전도 된다..!
암튼 그렇게 해서 끝!
'로봇 > ROBOTIS DARWIN OP 2' 카테고리의 다른 글
| Darwin OP 2 제작 도전 [2. 가상 조립 - Left Leg] (0) | 2025.04.03 |
|---|---|
| Darwin OP 2 제작 도전 [2. 가상 조립 - Right Leg] (0) | 2025.04.02 |
| Darwin OP 2 제작 도전 [2. 가상 조립 - Lower Chest] (0) | 2025.04.01 |
| Darwin OP 2 제작 도전 [1. 자료 조사] (0) | 2025.04.01 |