이번엔 Lower Chest 쪽을 가상으로 조립해보는 것이다..!
이 부분이 현재 조립을 해보면서 글을 쓰고 있는데.. 제일 어려울 것 같아서이다..
현재 도데체 내가 왜 Darwin OP 2를 골랐던걸까.. 후회하게 되는 타이밍이다..
Dawrin OP 2의 경우 찾아보니 거의 정보가 나오지가 않는다.. 그래도 일단.. 어떻게든 조립해봐야 겠다.. 정 안되면.. 다시 OP 1으로 바꿔야할지도..
아무튼 이번에 조립할 부분은 이 파트다!
 |
 |
 |
 |
 |
이번에는.. 조립 해보면서 글을 쓰고 있기 때문에.. 글이 이상할지도 모른다..!
아무튼 일단 먼저 왜 이게 어려운가를 설명해보자면..
Darwin OP 1은 정보가 많은데.. Darwin OP 2의 정보는 거의 없다..
일단 가장 중요한 메인 PC 사이즈와 파워 스위치의 사이즈 정보를 알아야 한다.. 근데 OP 1과 OP 2는 겉 모습은 거의 차이가 없지만 성능들이 업그레이드 되었기 때문에 장착된 PC나 보드들이 다르다..!
그리고 메인 PC 같은 정보는 사이즈를 그나마 알 수 있는 반면에.. 파워 스위치, 스피커, 마이크 등 이런건 이름을 알려주지 않고 진짜로 그냥 파워 스위치, 스피커, 마이크 이런식으로만 적혀있기 때문에.. 찾기가 더 어려워진다..
아무튼 최대한 정보를 찾아보면.. 일단 Darwin OP 1 정보의 경우..
http://machinedesign.jp/robot/products/darwinop.html
グローバルロボット関連|有限会社杉浦機械設計事務所
DARwIn-OPは小型LinuxPCとHDカメラをはじめとした各種センサーを搭載し、演算、センシング能力をもった「歩くコンピュータ」です。Dennis Hong博士率いるバージニア工科大学RoMeLa (Robotics & Mechanisms
machinedesign.jp
https://www.innovativeelectronics.com/index.php?pg=ie_pdet&idp=362
Innovative Electronics
Product Name fit-PC2i Features CPU Intel Atom Z530 1.6GHz Memory 1GB DDR2-533 on-board Storage 4GB SSD storage miniSD socket Display & Graphics Intel GMA500 graphics acceleration DVI Digital output up to 1920x1200 through HDMI connector Audio Line-out, lin
www.innovativeelectronics.com
이런 사이트에서 정보를 얻을 수 있었다.
일단 Darwin OP 1에 사용된 PC는 Fit-PC2i 이고 컨트롤러는 CM-730이다.
이제 Darwin OP 2에 있는걸 찾아야 하는데.. 컨트롤러는 CM-740이 쓰인건 알고 있고.. 도데체 PC가 뭐가 사용되었는지 도무지 모르겠다..

홈페이지에 성능 차이는 나와있는데.. 어떤건지도 안나와있다..
내가 이걸 찾는 이유는..

5번 프레임에서 도데체 어느 곳에 Main PC를 끼우는지를 모르겠다.. 조립 설명서에는 Darwin OP 1으로 설명되어서.. 설명과는 다르다..
현재 내가 추측하기로는.. Flat 나사 끼우는 저 6개의 구멍에다가 끼우는 것 같다고는 생각되는데.. 아직 확실하지는 않다..
참고로..

이거는 Darwin OP 1의 5번 프레임이다. Flat 나사를 끼우는 구멍도 없다..
조금.. 망한 느낌이 들긴 한다..
일단 그래서 내가 추측하기로는.. Darwin OP 2의 Main PC는 Darwin OP 1 처럼 시중에 판매되는 제품을 쓴 것이 아닌.. 개발한 곳에서 주문제작을 하여 개발하지 않을까 싶다..
그래서.. 일단 그렇게 된다면.. 실제 사이즈를 구하지 못하니.. 대충 어림잡아서 만들어야 한다..

일단 그나마 알 수 있는 정보는 이것이다.. https://www.robotis.com/model/page.php?co_id=prd_op2
로보티즈
자율주행로봇 전문기업, 서비스로봇 하드웨어 및 소프트웨어 솔루션 공급, ROBOTIS 집개미&일개미, DYNAMIXEL, 터틀봇3
www.robotis.com
이 사이트에서 얻은 것인데.. 저 사진이 메인 PC인 것 같다.
일단 눈으로 보이는 것은 정면에 2개 후면에 1개 나사가 보이고.. 나머지 나사들은 가려져있다..
그래도 알 수 있는건 직사각형이라는 것이고.. 각 4개의 나사를 사용하는걸로 추정이 된다..
그럼으로.. 아마도..

이곳이 PC를 장착하는 부분이 아닐까 싶다..
그러면 여기로 해서 스페이서 등을 먼저 끼운 후에 크기를 어림잡아서 보드 위치를 만들면 될 것 같다..
그리고 원래는 S6를 사용해서 고정하는 것이지만.. 이 부분에서는 Flat 나사를 사용하는 것 같다. 그럼으로 S10을 이용해서 해볼 것이다..! 어차피 둘다 길이는 4mm이다.

그렇게 하면.. 일단 이렇게 조립을 해볼 수 있다.. 그리고 저 나사 부분에 맞춰서 이번엔 메인 PC 부분을 어림잡아서 만들 것이다.
그 후

이렇게 스케치를 하고.. 2mm로 늘려서 만들어주면!

이렇게 조립할 수 있다..!
그러면 다음!
이번껀 파워 스위치 부분을 조립해볼 것이다. 원래 파워 스위치가 먼저 나와있긴 한데.. 메인보드가 중요해서 그걸 먼저 찾다보니.. 순서가 엇갈리긴 했지만.. 아무튼..
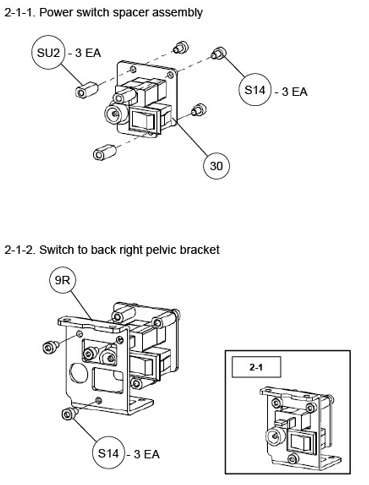
파워 스위치의 경우 9R 프레임을 이용한다고 한다.. 그래서 9R 프레임을 열어봤는데.. 어라?

분명 파일 이름은 9R 이라 되어있는데.. 모습이 전혀 다르다..
그래서 생각한게.. 설마.. 이것도 모양이 바뀌었나..? 하다가 예전에 대구 엑스코에 가서 봤던 Darwin OP 2가 생각난다.. 그 사진을 봤다.

음.. 여기에는 정상적으로.. 있다.. 그러면 설마 9L에 뭔가 있나..? 해서 봤는데..

진짜였다.. 음.. 왜 이름을 다르게 적어놓은거지..
아무튼 이것도 아까 했던 것과 비슷하게 스페이서 먼저 끼우고 프레임을 대충 어림잡아서 맞춰본다.. 파워 스위치의 규격이 제대로 나와있지 않기 때문에..
 |
 |
그렇게 해서.. 이렇게 만들었다..! 이 부분은 조금 나중에 완성했을 때 겉모습에서 보이는 부분이기 때문에.. 비슷하게 돌출 시켰다. 아무튼.. 저 판때기 부분도 2mm로 잡아서 하고 붙였다.
그리고 이제 5번 프레임과 모터를 붙일 차례다..
그런데 설명서에 이상한 점이 하나 있다..

나사를 끼울 때 너트를 끼우는 부분에 볼트로 고정시키는 장면이 나온다..
아마 이 방법이 가능할려면 5번 프레임의 모터 끼우는 저 부분에 나사선이 있거나 해야한다. 아니면 반대쪽에 너트를 끼운다거나.. 그런데 그런 장면이 없다..
아마도 잘못 된 방법으로 설명서를 만들었거나.. 5번 프레임에 나사선이 있거나.. 둘중 하나일 것 같다.. 아마 나사선이 있을 것 같다고 생각된다..
근데 나의 경우는 무조건 프레임들은 3D 프린터로 출력하기에 나사선을 넣을 수는 있으니.. 따로 출력 후 나사선을 넣거나 넣는다 하더라도 쉽게 부숴질 것이다.. (저건 철제라서 상관없겠지만..)
그래서 나는 이 부분을 그냥 너트 끼우는 곳에 너트 끼우고 반대편에서 나사를 끼우는 방법으로 했다.

이런식으로 했다. 나사 같은 경우 원래는 S17를 이용하지만.. S17의 경우 10mm 이다.. 약간 부족하다.. 그래서 S18를 새로 추가했다. Hex M2.5 * 12로 12mm 짜리를 추가해서 끼웠더니.. 완벽하게 딱 맞다..
그리고 나중에 진짜 조립해야할 때는 보드는 나중에 끼우고 저걸 먼저 끼워야 하긴 할 것 같다..
물론 이렇게 한다면 단점은 약간이라도 풀리거나 하면 거의 완전 분해 후에 끼워야 한다는 단점이 있지만.. 어쩔 수 없다..
아니면 인서트 너트를 끼우는 방법도 있긴 할텐데.. 저쪽에는 약할 것이다.. 암튼 그런 이유로.. 하기가 어렵다는 점..
그래서 저런 방식으로 맞췄다.
마찬가지로 여기서도 베어링 부분은 필요없기 때문에 모터에서 베어링 부분은 숨겼다..

그리고 이 부분이다.. 여기서부터.. 좀 망했다고 느꼈다..
왜냐하면.. 이전에서 말했던.. 프레임에 나사선이 있다고 했던게.. 진짜라는 것을..
일단 S14 구멍을 확인해보니.. 나사보다 약간 작다.. 즉.. 나사선이 있거나 아니면 끼우면서 강하게 조여서 나사선을 강제로 만들면서 끼운다던가.. 해야하는 것 같다..
그리고 보드를 고정시키는 부분과 겹쳐버려서 진짜로 겹쳤다..

뭐.. 어쩔 수 없다.. 이 부분은 나중에 프레임을 수정할 때 내가 사용할 보드 사이즈에 맞춰서 수정하면 되는 부분이니깐.. 딱히 상관은 없지만.. 조금 불편하다.. 암튼 원래 저기에는 너트를 끼우는건 아니긴 한데.. 프레임을 플라스틱으로 출력하는 경우 나사선을 만들기 어려우니.. 저런식으로 너트로 고정할 수 있도록 했다. (굉장히 불편해하는 중..)

그리고 이 부분도.. 마찬가지이다.. 일단 S10의 경우 Flat M2.5 * 4mm 나사이다.. 근데 저것도 프레임의 나사선에 끼우도록 되어있으므로 나사 길이가 맞지 않는다..
그래서 S19를 추가했다. S19 Flat M2.5 * 6mm로 .. 그래서 6mm 나사를 끼우니깐 완벽하게 맞았다.. 물론 반대편에 너트도 끼웠다.
이걸 하다보니.. 생각난게.. 어차피 Darwin OP 1 처럼 그냥 CNC로 철을 잘라서 만들까 생각했는데.. 만약 그렇게 되면.. 조립은 쉽겠지만.. Darwin OP 2 용은 2D로 제공되지도 않고.. 무거우면 또 움직이질 않을테니.. 그냥 모델을 수정해서 3D 프린터로 출력하는 방안으로 밖에 할 수가 없을 듯 하긴 하다..
암튼 그렇게 해서

이 부분도 끼웠다.
이전에 본게.. 너트 사용량이 적던데.. 설마.. 내가 생각하는 그런 일이 엄청 벌어지진 않겠지..? 라고 생각하는데.. 제발.. 정 안되면 인서트 너트라도 찾아야지 뭐..
암튼 모터 부분은 설명서에 적힌 것 처럼 끼우고..

이 부분을 조립해야하는데.. 이 부분 같은 경우 저 동그란건 내가 위에 올린 사진을 봤을 때는 그냥 손잡이로 돌려서 배터리 넣는 부분에서 배터리를 바꿀 수 있게 한 것 같다. 근데 어쨋든 저 동그란 나사 같은건 같이 포함되어있지는 않고.. 일반 프레임만 포함되어있는데.. 암튼 저걸 끼우면

이런식으로 된다..
이 부분은 처음 알았다.. 배터리를 쉽게 안정적이게 바꿀 수 있도록 고정한 것을..
암튼 그렇게 하면

Lower Chest 부분은 완성이 된다..!
그러면 암튼 이 부분은 끝!
짧게 쓸려 했는데.. 너무 기네..
'로봇 > ROBOTIS DARWIN OP 2' 카테고리의 다른 글
| Darwin OP 2 제작 도전 [2. 가상 조립 - Left Leg] (0) | 2025.04.03 |
|---|---|
| Darwin OP 2 제작 도전 [2. 가상 조립 - Right Leg] (0) | 2025.04.02 |
| Darwin OP 2 제작 도전 [2. 가상 조립 - Upper Chest] (0) | 2025.04.01 |
| Darwin OP 2 제작 도전 [1. 자료 조사] (0) | 2025.04.01 |