나는 현재 대학교 휴학을 했기 때문에 해보고 싶은 프로젝트를 모두 해보기로 했다. 그러다 보니 한번에 여러개의 프로젝트를 하게 되었는데.. 그 때문에 과연 기간 내에 진짜로 제작할 수 있을지는 모르겠지만.. 일단 도전해볼려고 한다..!
일단 Darwin OP 2를 제작해보는 것인데.. 내가 Darwin OP 1을 처음 본 것이 2012년 여수 엑스포에서 로봇관의 축구하는 로봇에서 처음으로 봤었다. 아마 7살 이였을 텐데.. 아직도 기억에 남는다.. (근데 당시에 왜 Nao 로봇 있었으면서 안보여준거지..)
Darwin OP는 어릴 때 부터 굉장히 가지고 싶던 로봇이다.. 예전에 로봇을 어딘가 판매 사이트에서 판매하는걸 본적도 있는데.. 당시에 내가 본 가격은 2000만원이였다.. (초등학교 저학년 때 본 것..) 그래서 구매하지는 못했지만.. 언젠가 만들어보거나 구매해보기로 마음을 먹었었다.. 나중에 부자가 된다면..
그렇지만! 현재는 구매는 못해도 제작은 할 수 있을 것 같다..! 아마 100만원 이내로.. 가능하지 않을까 라는 생각.. 아무튼 그때 본 Darwin OP 1 (축구 로봇)이 아닌 Darwin OP 2를 제작해볼려 한다..!
자료 조사
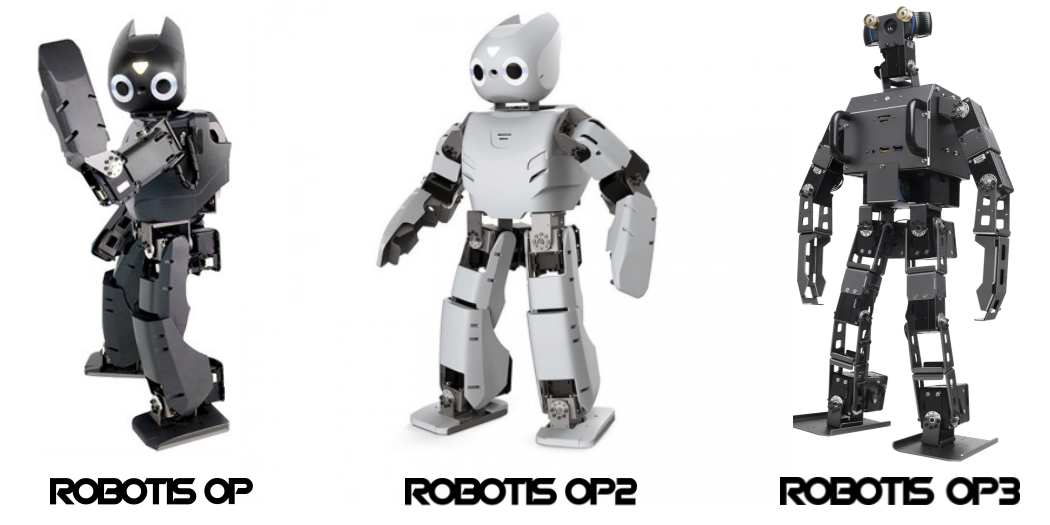
일단 내가 아는 정보로는 Darwin OP 1과 Darwin OP 2는 하드웨어 정도만 바뀌고 외형이나 프레임은 거의 차이가 없는 것으로 알고 있다.. (그런데 도데체 왜 OP 3는 저렇게 생긴걸까.. 음..)
그리고 모터는 Darwin OP 1이 MX 28, Darwin OP 2가 MX 28T로 각각 20개씩 쓰이는 것으로 알고 있다..!
가격은 대충 모터가 개당 26만원.. 그래서 이 프로젝트에는 사용하지 못한다..! 적어도 모터만 500만원 이상이 들게 된다..!
그렇기 때문에.. 나는 예전에 바이올로이드를 구매하면서 들어있던 AX 12A 모터를 이용할 것이다..! 참고로 AX 12A 모터는 총 18개 까지만 들어있어서 2개는 추가로 사야한다..
그런데 MX 28T를 그대로 AX 12A로 바로 변경할 수는 없다.. 왜냐하면..
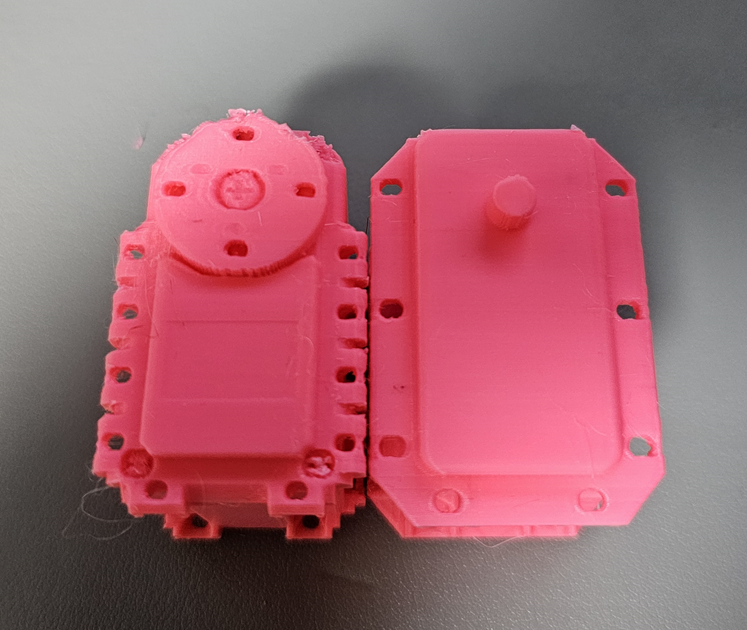
이건 Robotis 다운로드 센터에 있는 모터 3D 파일을 다운 받아서 3D 프린터로 출력해본 것인데..
눈으로 봐도 전혀 크기가 안맞는 것을 볼 수 있다.. 세로와 높이는 비슷한데.. 가로 크기가 좀 다르고 나사를 끼우는 부분도 전혀 다르게 생겼다.
그래서 실제로 만들 때는 아마도 프레임을 전체적으로 바꿔야 할 것이다..
물론 AX 12A에 추가로 뭔가를 장착해서 MX 28T 모양에 맞게 바꿀 수 있을까? 라는 생각도 하긴 했었다. 그런데 비교를 해보니 AX 12A의 커버를 뜯어서 수정하지 않는 이상 거의 불가능할 것 같다고 판단되었다.. 가로 크기가 안맞아서 나사가 들어가는 곳이 애매해진다.. 그리고 커버에 추가로 뭔가를 장착해서 한다면 약간 부실하기도 할 것이다..
그리고 제일 신경 쓰이는게 있는데.. 왜 모터가 비싼 MX 28T 일까 이다.. 성능을 보니 아마도 토크, 해상도 등 지원하는 것들이 더 좋기 때문에 그럴 것이라고 생각하기는 하는데.. 토크 문제라면.. 이 프로젝트를 하는 의미가 없어지긴 한다.. 왜냐하면 만들었는데 힘이 부족해서 움직이기가 힘들어져서 작동을 잘 안한다던가 할 수도 있으니깐..
그래도 다행인 것이 있다. 내가 알기론 Darwin OP 2의 프레임은 모두 철제로 알고 있는데 나는 3D 프린터로 출력할꺼라서 가볍다는 점이다!! 게다가 바이올로이드가 프레임이 플라스틱인데 잘 움직이니깐.. 아마도 진짜로 가능은 할 것 같다고 생각된다..!
그리고 한가지 최악인 점은.. 모터, 프레임, 프레임 스킨 등은 아직도 판매하거나 만들 수 있으니 상관이 없지만.. 더 이상 판매하지 않는건 하드웨어 들이다.. CM 740이나 다른 나머지 하드웨어들이 더 이상 판매하지를 않는다.. 뭐 그래도 이거라면 상관은 없을 듯 하다.. 어차피 프레임을 바꿀꺼니깐.. 다른 하드웨어를 넣으면 되서.. 아마도 괜찮지 않을까 싶다..!
암튼 우선 Darwin OP는 모든게 오픈소스로 되어있다. OP도 오픈 플랫폼이다..
데니스 홍이 개발한 후에 오픈소스로 풀어버린 것.. 굉장하긴 하다..
필요한 파일 다운로드
암튼 그렇기 때문에 Darwin OP에 대한 모든 것을 다운해야한다..! 모델 파일, 소프트웨어 등등 전부 찾아야 한다..
일단 우선 Darwin OP 사이트를 찾다보면.. https://darwinop.sourceforge.net/
https://darwinop.sourceforge.net/
darwinop.sourceforge.net
이런 사이트를 찾을 수 있다. 그냥 소개하는 홈페이지고 진짜는 안에 있다.
https://sourceforge.net/projects/darwinop/
ROBOTIS-OP (a.k.a. DARWIN-OP) project
Download ROBOTIS-OP (a.k.a. DARWIN-OP) project for free. ROBOTIS-OP (a.k.a. DARWIN-OP) project. For more information visit http://support.robotis.com/
sourceforge.net
이것이 Darwin OP의 대부분 자료를 다운받을 수 있는 곳이다. 그런데 한가지 문제가 있다.
이게 신기한게 내가 알기론 Darwin OP가 2010~2012년도 사이에 개발된 로봇으로 알고 있고 OP 3도 최근에 개발했어도.. 5년은 무조건 넘었는데.. 아직도 업데이트가 되고 있다.. 왜 업데이트가 되는진 도무지 모르겠다..
그런데.. 업데이트 되어도.. 딱히 쓸모있는 파일은 없다..
왜냐하면.. 저 링크의 다운로드를 받아도.. 최신 파일만 다운받게 되는데.. 그건 OP 3이기도 하고 들어가도 딱히 별거 없다..
그래서 예전에는 https://sourceforge.net/projects/darwinop/files/ 여기 링크에서 올라와있는 파일을 모두 수동으로 다운로드 하거나 https://sourceforge.net/projects/darwinop/rss?path=/ 여기 있는걸 자동으로 하루를 걸려 다운로드를 하게 했는데.. 그제서야 필요한 파일들이 다운로드가 되었다..

이렇게나 많이 다운로드를 했었다.. 대부분 중복 파일이긴 한데.. 뭐.. 버전 별로도 얻을 수 있어서 좋긴 하다..
근데 저렇게 힘들게 다운로드를 해놓고.. 나중에 구글을 검색하다가 좋은걸 발견했다.
https://github.com/ROBOTIS-GIT/ROBOTIS-OP-Series-Data
GitHub - ROBOTIS-GIT/ROBOTIS-OP-Series-Data: ROBOTIS-OP series datas
ROBOTIS-OP series datas. Contribute to ROBOTIS-GIT/ROBOTIS-OP-Series-Data development by creating an account on GitHub.
github.com
이것이다.. 내가 그동안 가지고 싶던 파일들이.. 여기 전부 있었다..
물론 https://github.com/ROBOTIS-GIT/ROBOTIS-OP2-Common https://github.com/ROBOTIS-GIT/ROBOTIS-OP2
다른 깃헙들도 있다. 저기는 아마도 Darwin OP에 사용되는 소프트웨어나 이런 것 같은데.. 뭐 지금은 중요하지 않다.. 일단 로봇 부터 모델링 하고 제작해야하니..!!
암튼 저 위 깃허브를 들어가보면 OP, OP2, OP3에 대한 파일들이 전부 있는데.. 나는 OP2만 필요하니 OP2로 들어가보면..

이렇게 있다. 여기에서 제일 필요한건 Hardware 폴더! 들어가보면 Electronics 폴더와 Mechanics 폴더가 있는데 내가 필요한건 Mechanics 폴더이다..! Electronics 폴더는 로봇의 컴퓨터나 센서 정보들이 들어가있는거..
암튼.. 저기에 들어가보면..!

드디어 필요했던 파일들을 볼 수 있다..!
여기에서 내가 진짜로 필요한건 "ROBOTIS OP2 Part Files.zip", "ROBOTIS-OP2_Skin_STP.zip", "DARwIn OP Assembly Manual.pdf" 정도 이다..
암튼 이렇게 자료 조사는 끝났다..!
이제는 가상으로 Darwin OP 2를 제작해보고.. 어떤 원리인지 등등을 확인한 후 AX 12A 전용 프레임으로 변경해보는 것이 이 프로젝트의 최종 목표다..!! (아마도 군대 가기 전까지 끝내는건 무리일 가능성이 제일 높다..)
특이한 점
그리고 한가지 특이한 점도 있다..
파일을 둘러보다가 "DARwIn OP Part Files.zip" 파일이 있는데.. 이걸 압축 풀어보면..

이렇게 2개의 폴더가 있다. 2D와 3D가 있다는 것이다.. 3D는 이해가 가는데.. 2D는 왜일까 싶어서 봤더니..
2D로 출력 가능하도록 만들어 뒀다는 것이다..
이걸 보자마자 여러 생각이 들었다. 데니스 홍이 Darwin OP를 개발하고 여러 연구소에서 요청이 들어와서 오픈 소스로 풀었다고 알고 있었는데.. 그것 때문에 2D 버전으로도 조립 가능하게 만든걸까? 아니면 3D 제조 비용이 비싸서 2D로도 제작할 수 있도록 만든 것인가? 등 여러 생각이 들었다..
아무튼.. 진짜 대단하다고 느꼈다. 나 같은 경우만 해도.. 예전부터 이건 내가 힘들게 습득했고 내가 알아낸거니깐 다른 사람들한테는 절대 안알려줄꺼야! 라고 생각했던 생각이 난다.. (이미 다른 곳에서 다 개발 됬을텐데.. 그런 생각을 한게 지금도 후회되기도 한다..)
암튼.. 힘들게 개발한걸 오픈소스로 풀었다는 것도 대단하지만.. 여기에서 제작하는 사람들을 위한 배려까지.. 이건 완전 나한테는 넘사벽인 것 같다.. (미래에는 나도 그럴 수 있을까..)
참고로 접히는 부분에는 규격에 맞게 틈이 정확하게 있고.. 심지어.. "DARwIn OP Fabrication Manual.pdf" 이 PDF 파일에는..

어떤 방법으로 휘어야 하는지.. 어떤 도구를 써야하는지.. 어떻게 부품을 만들어야 하는지.. 어떻게 조립해야하는지.. 2D 만을 위한 상세한 방법들이 나와있다..
어릴 때는 단순히 만들거나 사고 싶다라는 단순한 생각만 들었는데.. 이젠 찾아보면 찾아볼 수록.. 이 로봇을 개발하고 오픈소스로 푼 것이 얼마나 힘들고 얼마나 대단한지.. 이제야 알게 되었다..
나도 언젠가.. 이런 로봇 개발자가 될 수 있을까.. 흐음..
암튼..! 이제 자료조사는 전부 끝났으니.. 다음 부터는 가상으로 조립해볼 것이다..!
그 이후에는 AX 12A 모터로 대체하는 작업을 할 것인데.. 만약 아직도 내 기술이 부족해서 못할 것 같다고 판단이 되면.. 그냥 3D 프린터로 출력하게 목각 인형으로라도 가지고 놀아야 겠다..!!
아 마지막으로.. 내가 AX 12A로 만들고 싶어서 예전에 엄청 검색을 해봤는데.. MX 28T를 다른 AX 12A나 이런걸로 대체해서 만들 순 없는지에 대한 글은 몇개 보았는데.. 진짜로 AX 12A로 만든 글은 어디에서도 보지를 못했다.. 그나마 만들었다는 글은 3D 프린터로 프레임을 출력해서 저렴하게 만들었다는 글은 본적이 있는데.. 그래도 MX 28 모터를 사용했기 때문에.. 기본 500만원 이상은 나간다..
뭐 다른거라면 Poppy 로봇 커뮤니티에서 본걸로는 다른 회사의 서보모터에 무언가 장치를 부착해서 대체로 사용할 수 있도록 하는 글도 있던데.. 그 모터도 애초에 비싸다..!!
그래서 결국 내가 가지고 있는 AX 12A로 언젠가는 만들어보자 라고 생각했던 것..
암튼 그렇다.
끝!
'로봇 > ROBOTIS DARWIN OP 2' 카테고리의 다른 글
| Darwin OP 2 제작 도전 [2. 가상 조립 - Left Leg] (0) | 2025.04.03 |
|---|---|
| Darwin OP 2 제작 도전 [2. 가상 조립 - Right Leg] (0) | 2025.04.02 |
| Darwin OP 2 제작 도전 [2. 가상 조립 - Lower Chest] (0) | 2025.04.01 |
| Darwin OP 2 제작 도전 [2. 가상 조립 - Upper Chest] (0) | 2025.04.01 |