위 블로그에서 중간에 Bambulab 3D 프린터를 구매해서 만들어야 겠다고 한 후에.. 진짜로 이번에 구매해보았다!!
원래는 내가 군대를 갔다와서 구매를 할려고 했는데.. 그렇게 되면 장점과 단점이 있었다..
Bambulab 제품은 2년 마다 새 제품이 출시되는 듯 한데.. 군대 다녀와서 그걸 구매할 수 있다. (하지만 굉장히 비쌀 가능성이 있다.. 현재 출시한 H2D 보다..)
프린터를 사도 곧 군대에 가기에 제품을 2년 동안 사용하지 못한다. (어차피 지금 쓰는게 더 많이 쓰고 군대 다녀오면 바로 복학이라 기숙사에서 쓸 수도 없고.. 프린터는 구매해도 쓰기가 거의 어렵다..)
이런 것 때문에.. 망설였었다.. 2025년 초 쯤에도 구매할까 고민했었는데.. 군대 갔다오고 나서 구매하자고 했었는데..
내가 로봇을 만들려고 하다보면서.. 계획 보다 더 빠르게 모델링이 끝나서 로봇을 그냥 어느정도 하드웨어까지 만들고 군대에 갈까 생각 중이였다..
그리고.. 내가 이번에 졸업한지 2년도 안된 것 같은데.. 졸업한 고등학교에서.. 학생들에게 수업을 해야한다..
그런데 그 중에 하드웨어를 만들어야 하는 그런 것이 있는데.. 그 하드웨어를 만드는데 3D 프린터가 필요하다..
인공지능과에는 MakerBase 프린터가 있었지만.. 사용하기가 까다롭고.. 출력 퀄리티도 않좋다..
그래서 학생들이 모빌리티과(디바이스과)에 가서 허락 받고 학생들이 거기 3D 프린터도 사용을 해보았었는데.. 학생들 말로는 출력이 아예 안되는 수준이라 했다.. (사진 보면 그냥 필라멘트가 압출이 안됬던지 습기 차서 문제 생긴 것 같긴 하다만;;)
뭐 아무튼 그래서 내가 지금 3D 프린터를 구매하게 되면..
군대 가기 전까지 엄청 많이 사용할 수 있고..
로봇 제작이나 학교 프로젝트 제작 등을 할 수 있어서..
이번에 학교에서 하는 수업으로 약 100만원 정도 받게 되는데 아직 돈은 안받았지만.. 미리 받았다 생각하고 바로 질러버렸다 !!!
5월 12일에 구매했었는데..
일단 우선 내가 P1S Combo를 선택한 이유가 있다.
Bambulab 제품은 내가 알기로는 A1 MINI, A1, P1P, P1S, X1C, X1E, H2D 제품이 있던걸로 기억한다..
근데 일단 A1 MINI는 크기가 작아서 기각
A1은 크기는 P1S랑 똑같지만 챔버형이 아닌 오픈형이여서 내가 가지고 있던 기존 프린터와 다를 빠 없이 속도만 빠른거라 기각했다. 가격은 저렴하다만.. 챔버형이 훨씬 좋다.. 온도 유지를 하면 빌드 플레이트에서 출력물이 떨어질 경우도 적어지고 특정 필라멘트를 사용할 수 있기 때문이다.. (뭐 PLA만 쓸꺼지만..) 그리고 소음도 적다.
P1P는 애초에 한국에는 안판다.
X1C는 라이다로 유량 칼리브레이션, 실시간 카메라 등등 완전 좋은 옵션들이 있었지만.. 상당히 비싼 편이다..
X1E는 애초에 기업 용인걸로 안다.. X1C하고 비슷하긴 하던데.. 비싸다..
H2D는 출시된지 진짜 별로 안되었고.. 애초에 2개 노즐은 좋지만.. 방식이 좀 허술해서 별로다..
그리고 가격이 상당히 비싸다..
그래서 이런 문제들 때문에 P1S로 선택했다..!
P1S는 챔버형이고 물론 디스플레이가 허접하긴 하다만.. 내가 다한증 때문에 애초에 터지가 잘 안되다 보니 버튼형도 좋고..
X1C랑 별로 차이도 안나서 P1S로 구매한 것이다..!! 가격도 스마트폰 가격 정도라 살만했고..
근데 이제 AMS를 할지 안할지였는데..
AMS는 추가하면 가격이 너무 비싸서 안할까도 생각했는데.. 나중에 필요하면 따로 사야겠다 하고 봤더니.. 60만원에 판매하고 있었고..
콤보로 같이 사면 40만원 정도 가격이였다.. 그리고 애초에 내가 만들려는 부품들이 멀티 출력이 필요한 경우도 있었고.. 멀티 컬러를 체험해보고 싶었던게 가장 컸던 것 같다..
그래서 P1S Combo로 구매했었다..! 참고로 이 때는 이미 AMS 2 PRO도 출시했었는데.. 미국 공홈에서는 P1S에 AMS 2 PRO해서 100달러 정도 더 얹혀서 구매할 수 있게 만든 반면.. 한국이나 일본 등은 그런 옵션이 없었다.. (근데 고객센터에 물었을 때는 다른 국가는 있냐고 물어봤을 때 왜 없다 한거지.. 미국은 있으면서;;)
근데 뭐 어차피 필라멘트 공급 속도 더 빨라지는건 어차피 기본도 충분하게 만들었을테고..
필라멘트 건조 기능은 애초에 프린터 사용 안하고 있을 때만 켜진다고 누군가 했었던 것 같다..
그래서 그냥 포기하고 P1S Combo로 했던 것이다.. (참고로 나중에 타오바오에서 AMS 2 PRO 40만원에 팔던데.. 그냥 그걸 따로 살껄.. 후회하기도 한다..)
뭐 아무튼!
내가 구매한건 파이토스인데.. 그냥 여러 유튜버에서 파이토스 사용한데서 거기서 구매한 것 뿐이다..
Bambulab 공홈에서 구매하게 되면 배송이 늦게 오기도 하고 필라멘트를 7만원어치를 준다는데 솔직히 PLA면 좋은데 내가 별로 쓰지도 않는 필라멘트를 준데서 그냥 파이토스에서 구매한거긴 하다.. 구매도 어떻게 하면 할인도 6만원 가까이 해주고..
제일 좋은 옵션인 듯 하다..
그래서 구매한게 저 사진..!
아 그리고 아까 안적었는데.. 구매한 이유 중에 또 하나는 120만원에 할인 중인 것 때문이기도 하다.. Bambulab 홈페이지에서도 할인가로 판매되는거 보니.. 나중에 다시 가격이 오르는 듯 하다.. 미국 공홈은 이미 할인가가 아닌 기본가로 판매중이다..
일단 제일 놀라운건.. 밤 11시 40분에 시켰다.. 제품을.. (구매할 때 내꺼 이체 한도 때문에.. 네이버페이에 돈이 입금이 안되어서.. 엄마 카드 써서.. 엄마 카드로 돈을 보냈다;; 하하)
어쨋든 밤 11시 40분에 구매했는데 그로 부터.. 12시 23분.. 사진에서 보이는데로 출고가 되었다..
도데체 뭐지? 어떻게 그게 바로 배송되는거지..? 뭐 물류센터에서 배송한다고 해도.. 그 큰걸..?? 굉장히 놀람.. ㄷㄷ
개봉!
암튼 그렇게 해서 도착했다 !!!! 진짜 하루만에.. 그것도 밤에 시켰는데 다음날에 온..
혹시 궁금할 것 같아서 4면을 보여준다면..
이렇다.
진짜 어마무시하게 컸다.. 내 키가 185 정도 되는데.. 그에 허리까지..? 정도 되나..? 아무튼 엄청 컸다..
참고로 무게도 재봤는데.. 21.8KG이다.. 더럽게 무겁다..
진짜 상당하다.. 참고로 중간 사진에 이불 같은건 이불 맞다.. 내가 자는 자리라서..
암튼 저기 보면 QR 코드있는데.. 어떻게 개봉하라고 안내되어있는 설명서다..
근데 난 알빠노다 애초에 그냥 내가 알아서 개봉하는게 제일 맘 편하다.. 그래서 무시했다. (저거 영어도 읽어보지 않고 그냥 사진 찍고 넘기거긴 하다만;; 글 쓰면서 지금 앎.. ㅋㅋ)
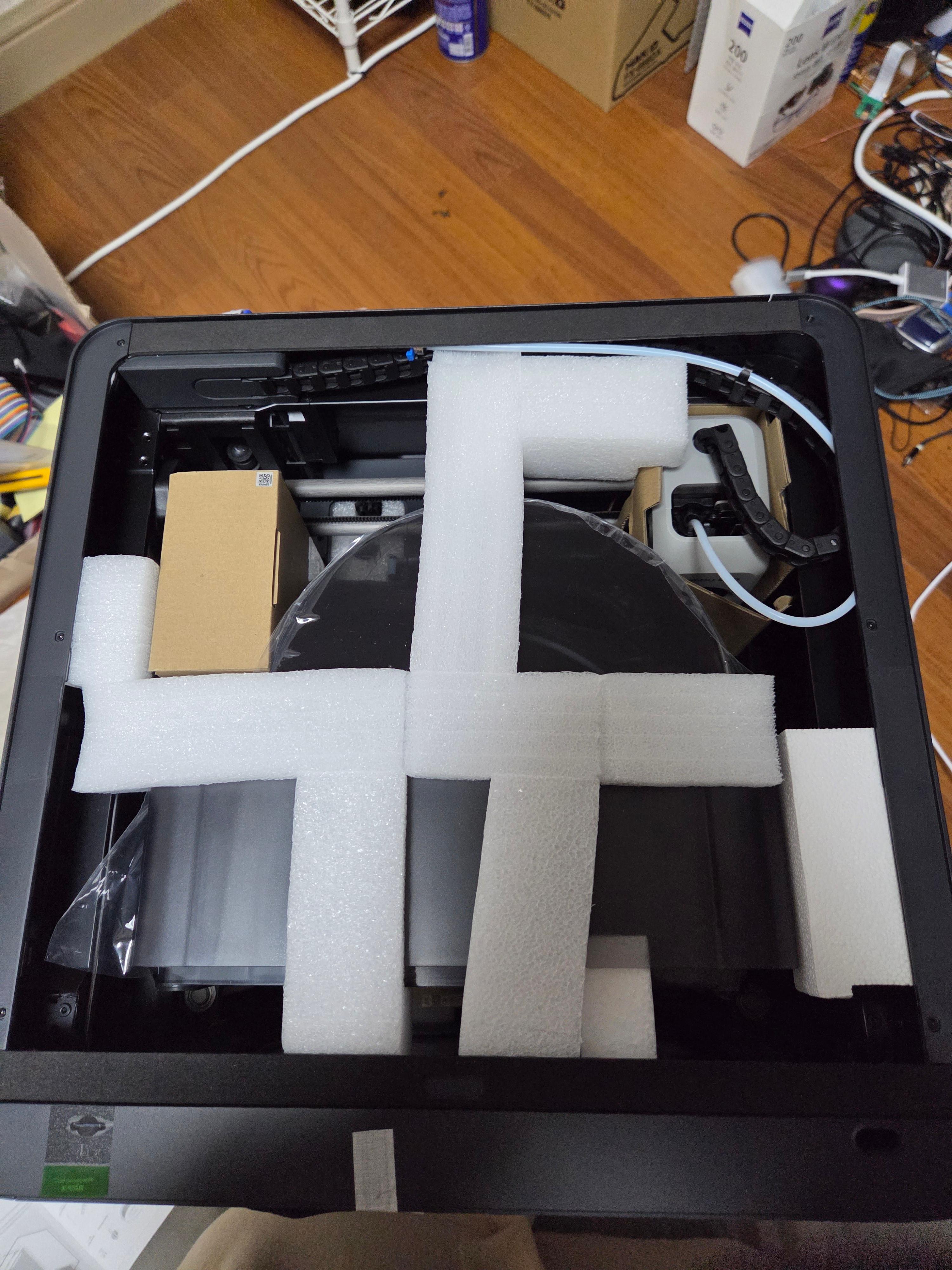
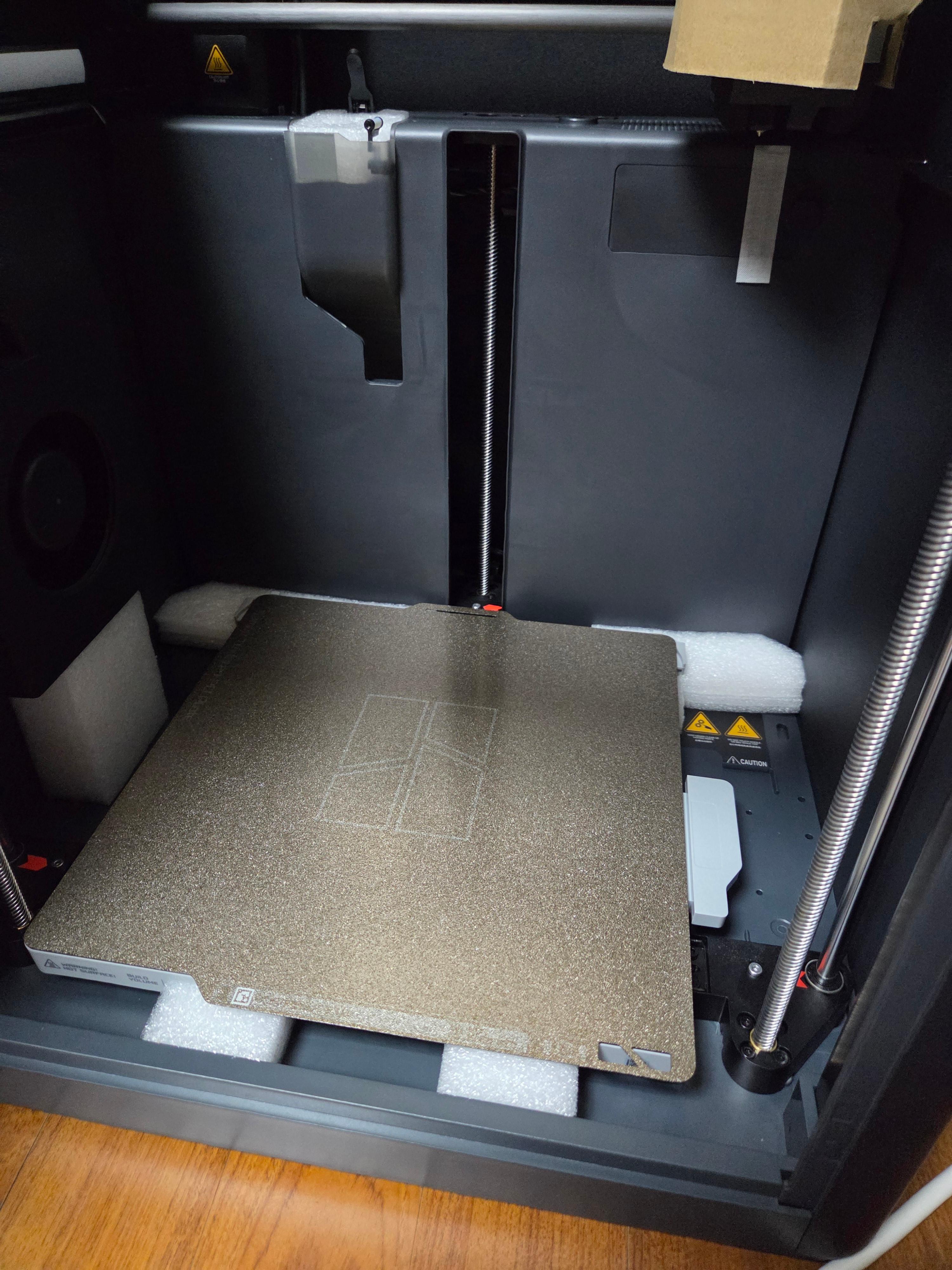
암튼 안에 들은걸 꺼내면 이래된다.. 진짜 크다..
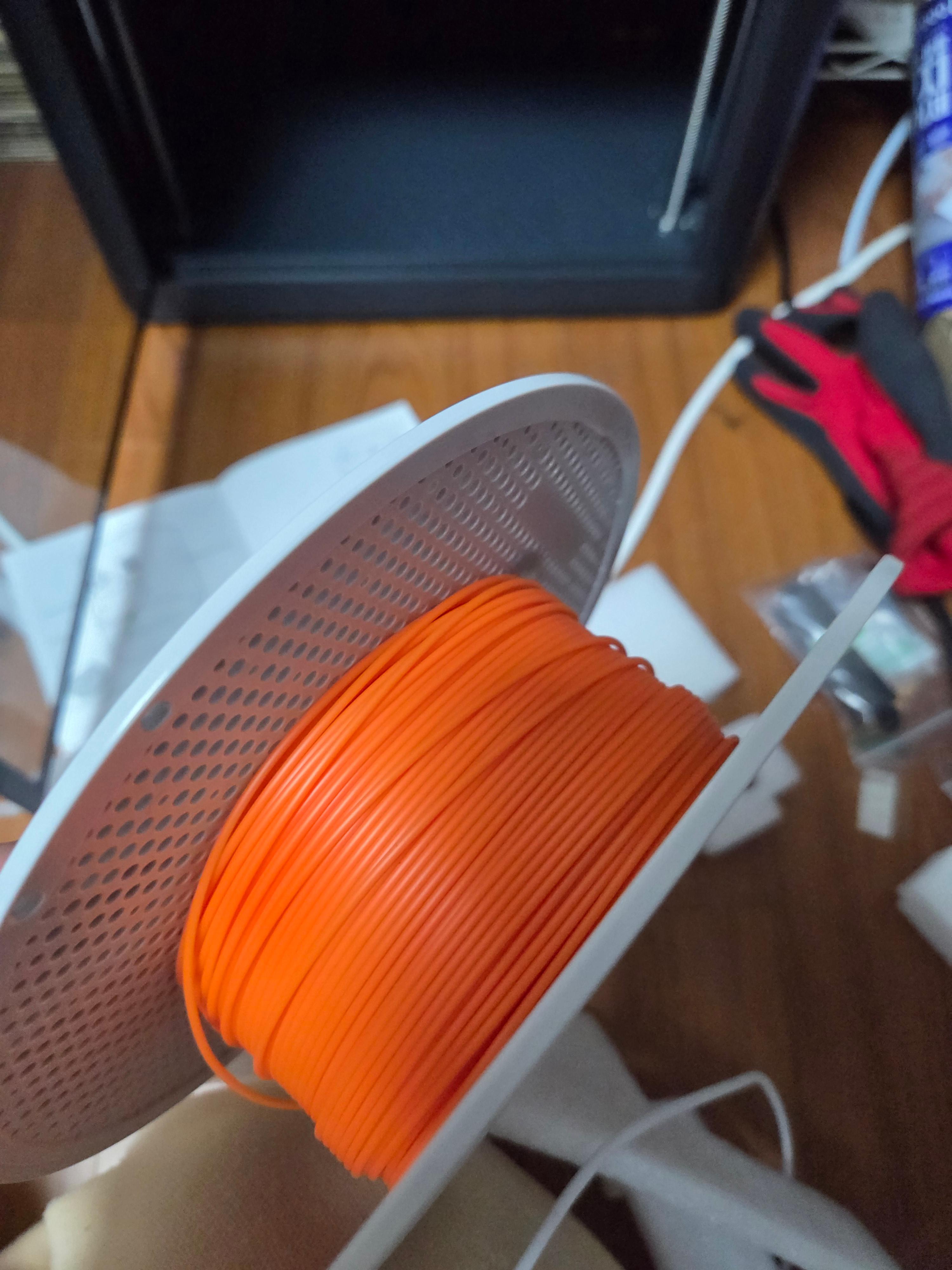
저걸 꺼낸 후에 상자 안에는.. 필라멘트가 있던데..
이렇게 PLA 초록색, PLA 주황색, PLA/PETG Support 필라멘트가 있다. 진짜 너무한건 0.2kg인가 0.25kg 밖에 안준다.. 각각
아니 그래 비싼걸 구매했는데.. 왜 저것 밖에 안주지..? 하는 생각 부터 들었다..
그래도 뭐 기존에 필라멘트는 여러개 가지고 있었으니 상관은 없다만..
암튼 최대한 열어봤다..
항상 비싼거 사면 오는 스티커도 있고.. 유리 덮개도 따로 포장되어있고.. 진짜 크다..
유리 덮개도 열어보면.. AMS도 있고..
암튼..
액세서리 박스, SD 카드 꽃는 곳.. (SD 카드 꽃는 곳엔 이미 SD 카드는 꽃혀있다. 근데 저 초록색 비닐 같은거 아래에 스티커가 붙어있는데.. 붙일꺼면 제대로 붙이지.. 삐딱하게 붙여진게 약간 아쉽..)
액세서리 박스에는 LCD 창과 전원 케이블과 추가 여분 부품들이 있다.
안쪽은 이래 AMS가 있다..
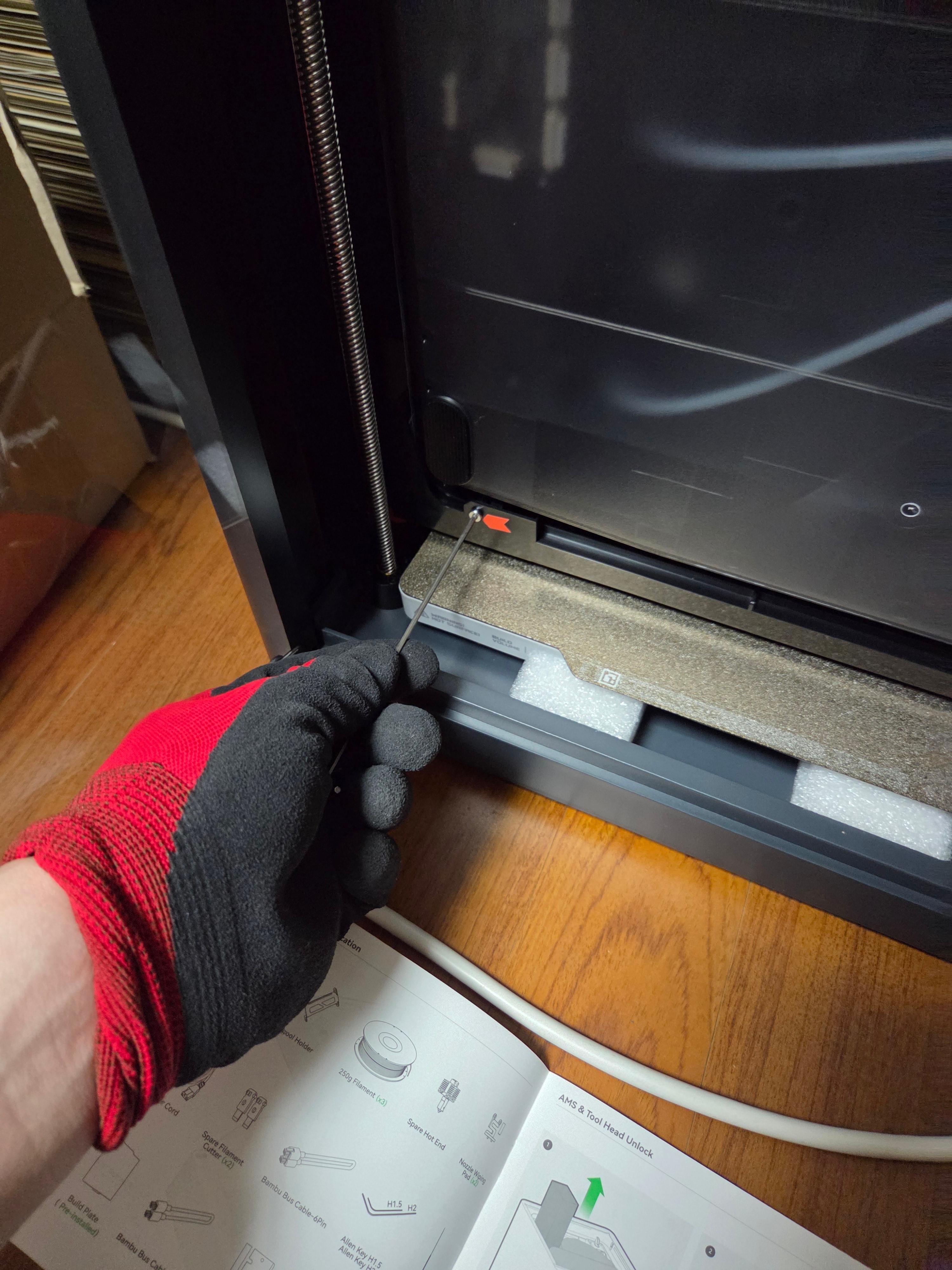
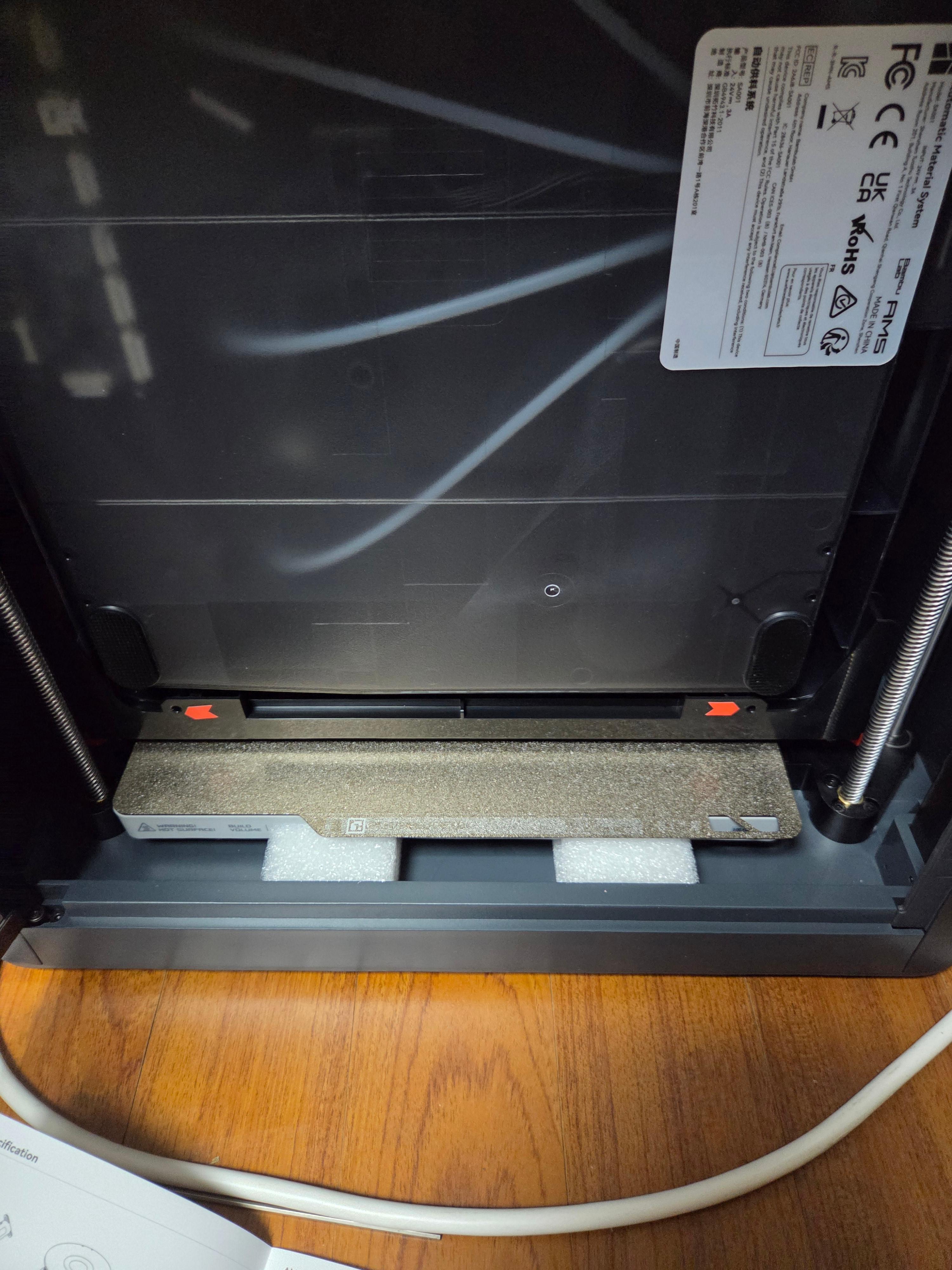
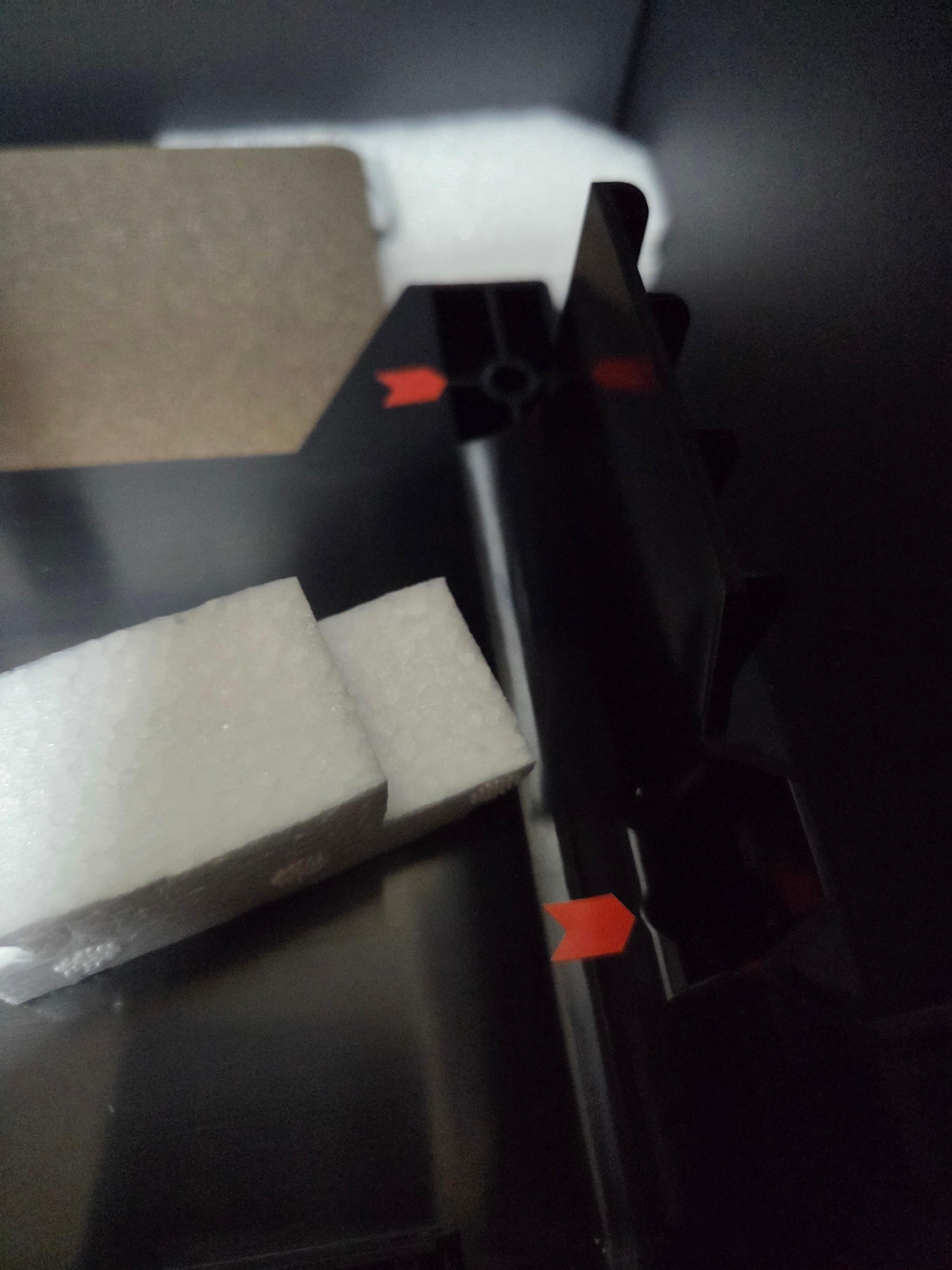
일단 AMS를 분리해야하니.. 관련 부품을 떼기 위해 전면 유리를 뗐다.
참고로 저 때 고등학교 학생들과 디스코드 통화로 같이 열고 있었던지라.. 하늘다람쥐 동물 잠옷 입고 있었다..
여기 나사를 풀게되면 AMS를 뽑을 수 있다.
그리고 빼서 확인해보니.. 캬아 인데..
이건 왜 들은거지..? AMS에 쓰라는 것 같긴 한데.. AMS에 기본으로 들어가있는걸로 아는데..?
뭐 아무튼..
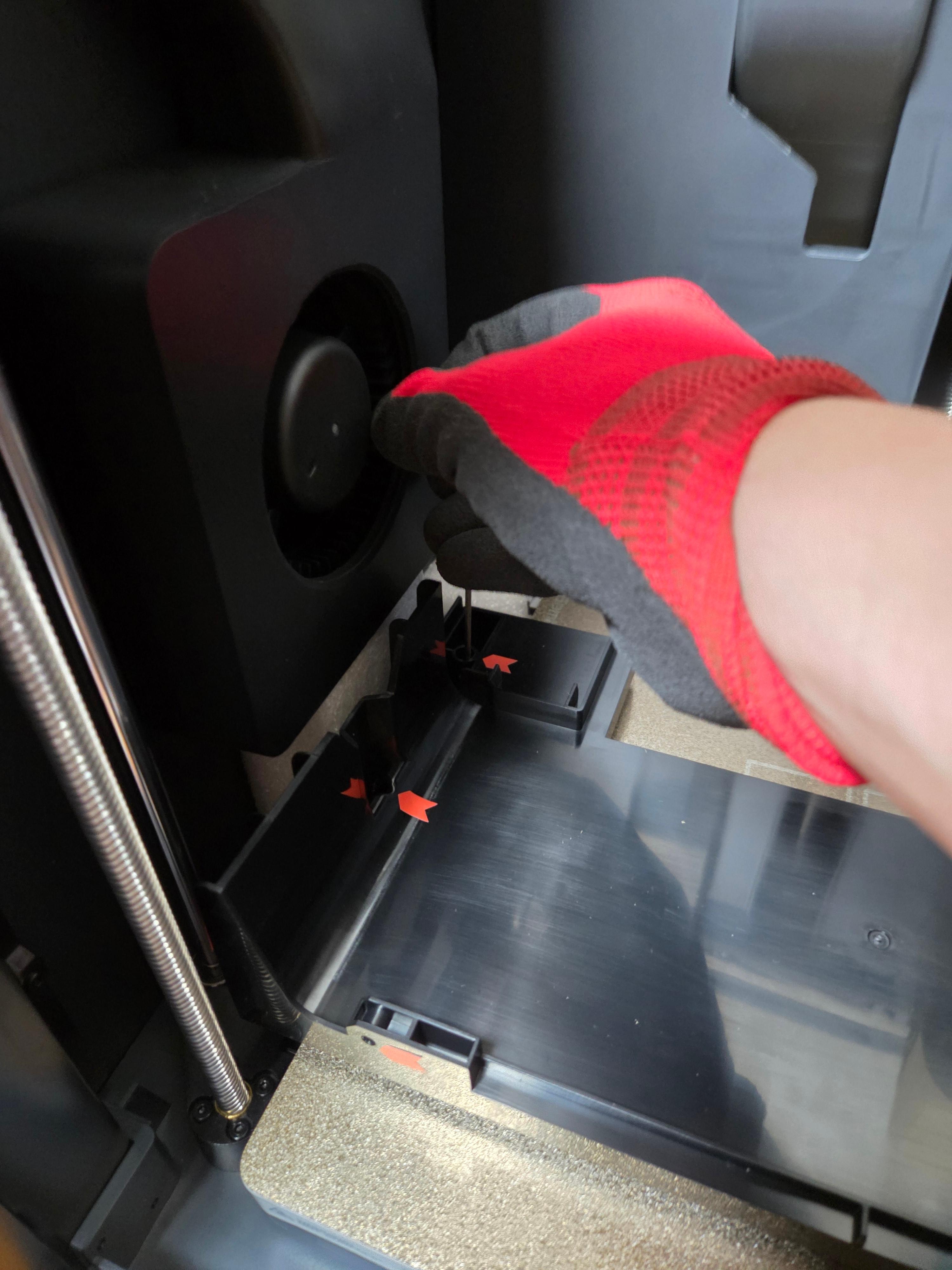
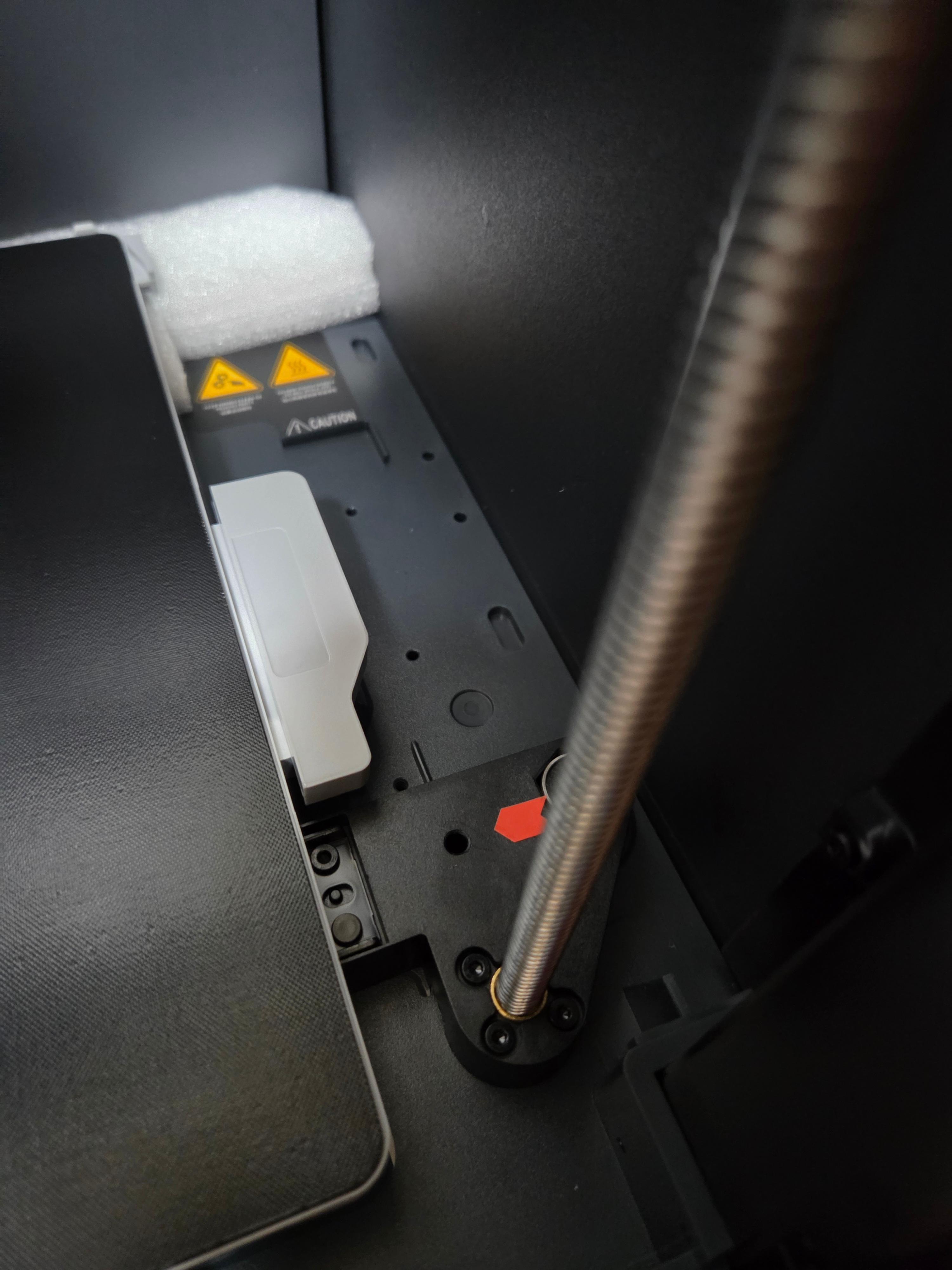
나머지 나사도 풀어서 뭔가를 제거해준다.. 저거 플라스틱은 AMS 때문에 있는 것 같은데.. 나중에 이사할 수도 있으니.. 간직해야겠다.. (아직 비닐도 안버렸다.. 혹시 나중에 이사갈 수도 있으니..)
나머지 나사도 제거!
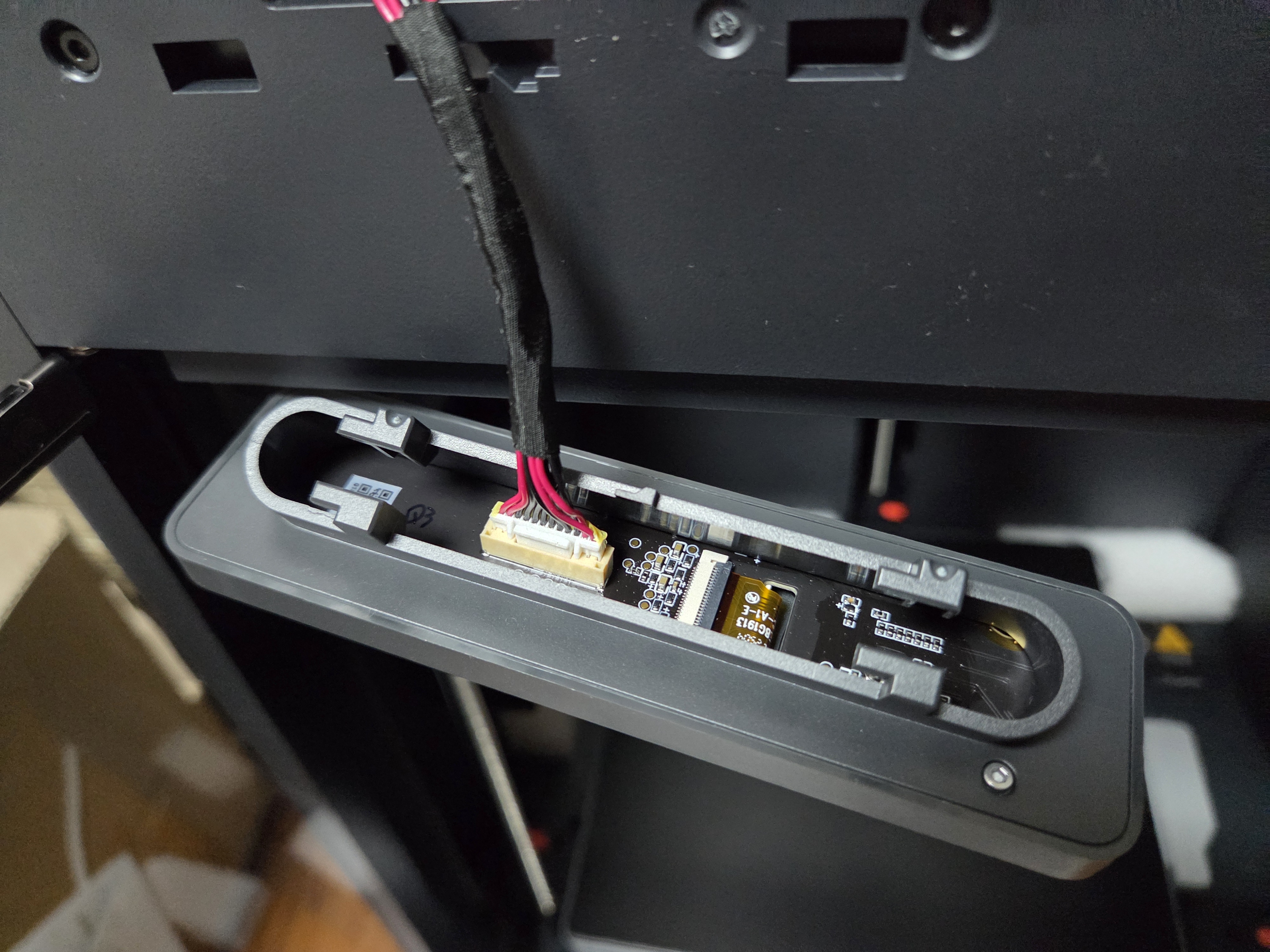
그 후 디스플레이도 달아주었다. (저 반사된.. 굿즈는 무시..)
저거 초록색 스티커는 떼어주고.. 저 뭔가 스티로폼도 떼어주고.. (스티로폼은 하나는 너무 안떼져서 출력할 때 빼줬다.)
그리고 파워 케이블에 안전하라고 마개도 있다.
그리고 드디어 연결..!!!
확실히 비싼 제품이라 그런가 다르다..
AMS는 이렇게 그냥 스티커 제거해주고 안에 부품 꺼내고.. 해서 끝났다.
아까 있었던 윗면 유리 덮개도 감싸고 있던거 떼서 덮어주고.. 캬아.. 진짜 깔끔하긴 하다..
아 그리고 스마트폰과 연결하는데.. 내가 스마트폰을 데이터에 연결했다 보니.. 초기에는 같은 와이파이에 연결해야하는데.. 그걸 모르고 했다가.. 몇십분을.. 왜 안되지 했었다.. ㅋㅋ
아무튼 캘리브레이션도 30분간 해주고.. 필라멘트도 까서 끼워주고..
했는데.. 참고로 난 처음에 오른쪽이 첫번째인줄 알고 끼웠더니.. 처음에 출력하는 3D Benchy를 출력할려고 보니 A1에 끼우라고 해서.. 맨 왼쪽으로 바꿔서 끼웠다..
암튼 그렇게해서.. 진짜 엄청난 스피드로 출력을 했다.. 참고로 출력할 때 오토레벨링을 하고 엄청나게 큰 진동으로 소음 억제 기능을 하는 것 같던데.. 소리 진짜 x라 크다..
지금까지도 여러번 출력하는데.. 그 소리가 진짜 너무 크다.. 바닥이 울릴 정도니깐..
해외 보니깐 GCode 수정해서 없앨 수 있다고는 하는데.. 귀찮아서 일단 놔두고.. 그냥 바닥 발판을 샀다..
암튼
속도를 보면 진짜 어마무시하게 빠르다..
이게 도데체 어케 가능한거지..? 처음으로 눈으로 본건데.. 진짜 기존 상식이 완전 다 깨질 정도였다..
게다가 사진은 안찍어서 보여줄 순 없다만.. 퀄리티도 내 기존 프린터로 출력한 것 보다 낫다.. 기존 프린터는 저것도 2시간 30분 걸리는데..
진짜 기존 상식이 완전 다 깨졌다..
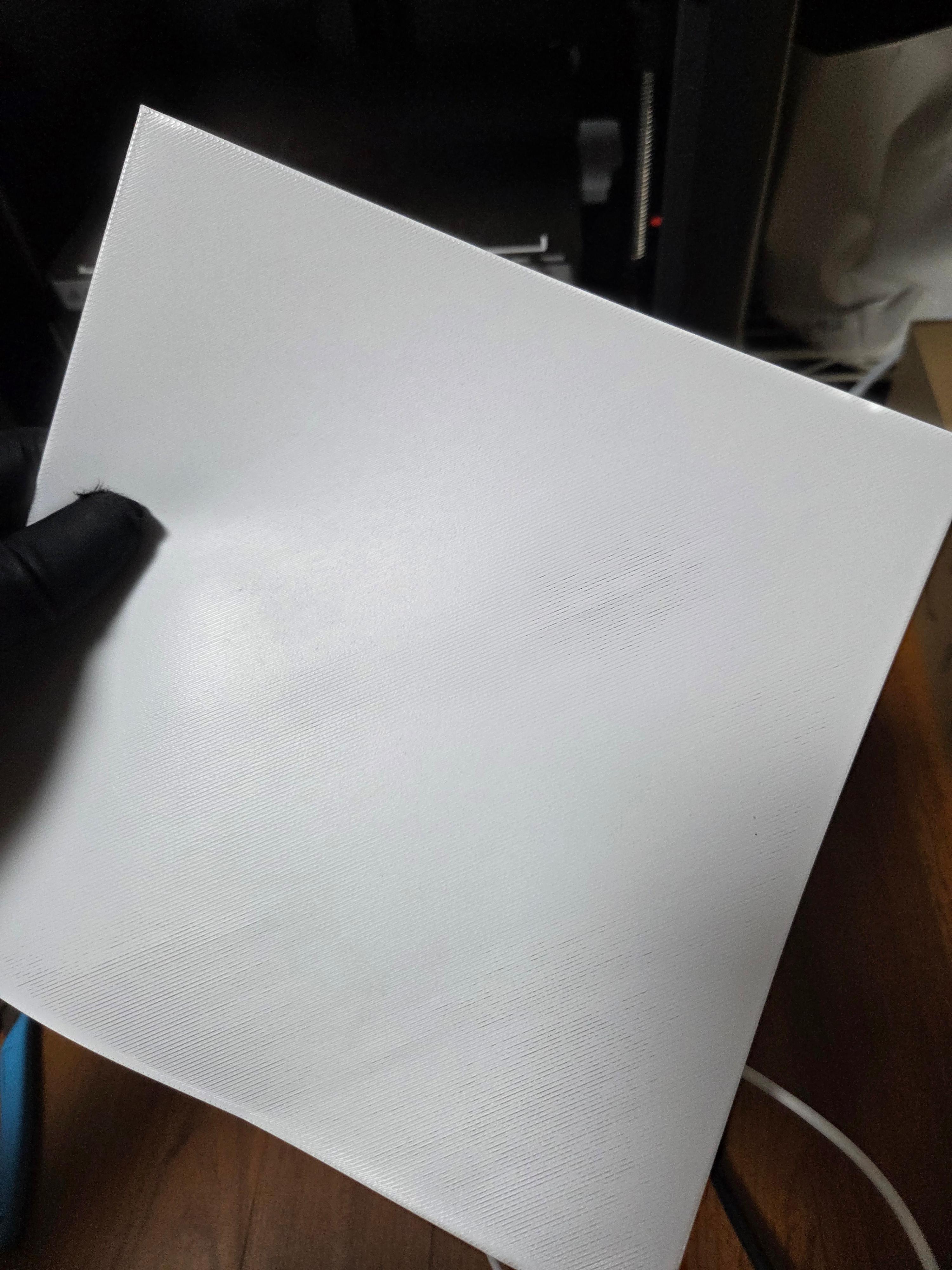
종이도 진짜 잘 출력했다. 저 필라멘트는 그냥 내가 기존에 가지고 있던거 끼운거다. RFID는 인식 안되지만 출력에는 문제가 없었다. ESun PLA인데 문제없이.. 잘 된다..
그리고 그 뒤에..
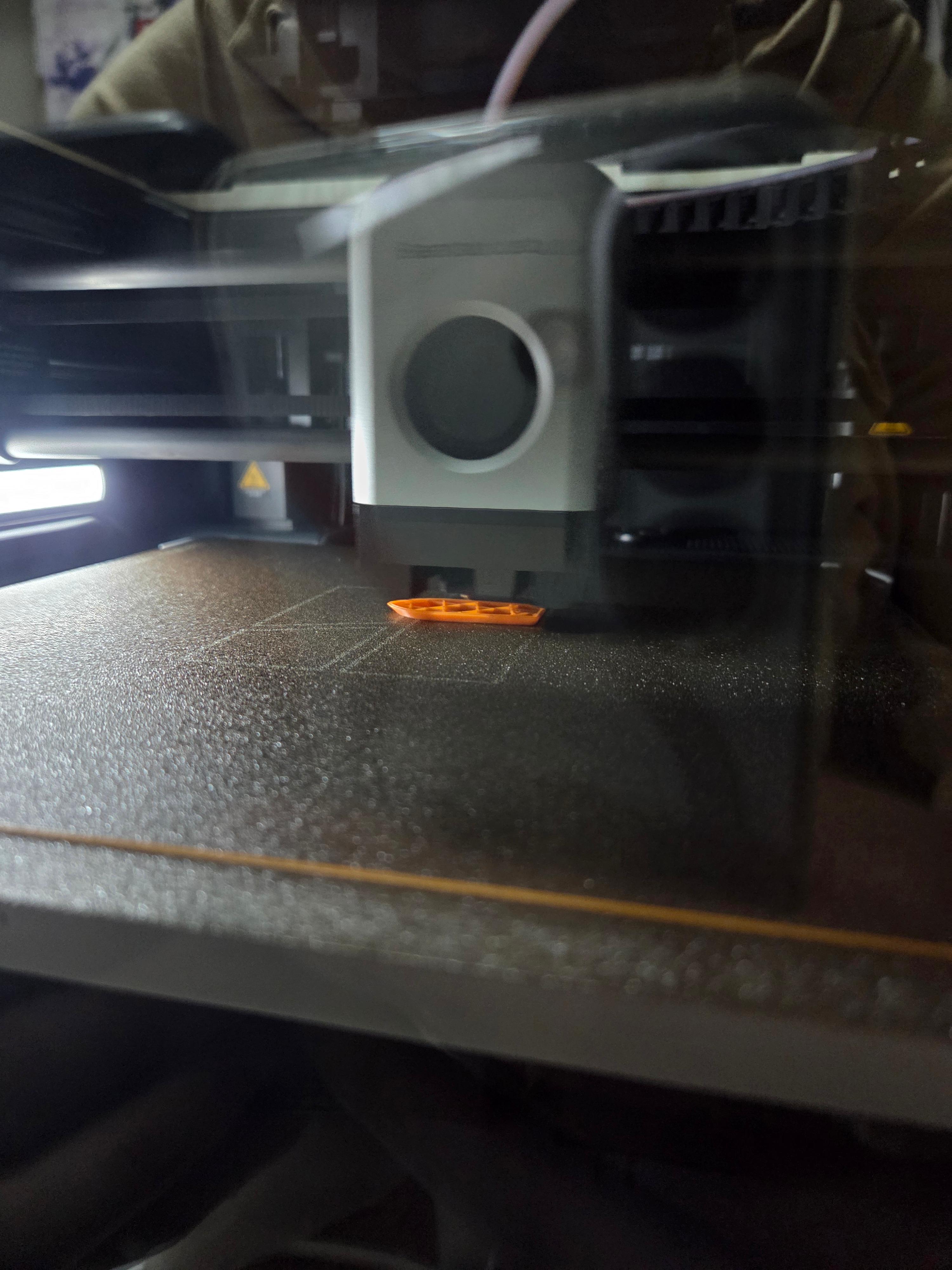
이런 것도 출력했었다. AMS를 하면 멀티 출력할 때 필라멘트를 엄청 바꾸는데.. 그 때마다 버려지는 통인데..
나중에 이것 때문에 문제가 생기기도 했는데.. 그건 다음에 다시 적어보겠다..!
암튼 진짜 출력 퀄리티도 말이 안되고.. 시간도 말이 안된다..
진짜 어마무시하게 빠르다..
내 기존 프린터가 30 * 30 * 40 짜리인데.. 이 프린터는 25.6 * 25.6 * 25.6에서 좀 더 적긴 하다만 암튼 저정도 출력할 수 있는데.. 솔직히 기존 프린터도 엄청 크게 출력은 잘 안하다 보니.. 저정도 큰게 필요할까 생각하기도 했었는데..
출력해보면서 알았다..
지금 이 크기는 한참 부족했던거란걸.. 출력이 너무 안정적으로 잘되고 속도도 빠르다보니깐.. 더 큰 것도 괜찮을 것 같다고 생각된다.. 근데 뭐 H2D 같은 큰건 비싸니깐 뭐 안사겠다만.. 큰게 확실히 좋을 것 같다.. 이 정도로 빠르면..
암튼.. 진짜 만족 중이며.. 엄청 쓰고 있다..
AMS 덕 분에.. 이전 프린터는 보우덴 방식이라 필라멘트도 끝까지 못 썼는데.. 이걸로 끝까지 쓸수 있게 되었다.. 그래서 신나서 내가 가진 거의 모든 필라멘트를.. 낭비하긴 했다;; 하하;;
암튼.. 프린터.. 진짜 잘 샀다고 생각된다..
핸드폰으로도 바로 연결되고.. 또 사용 안하면 자동으로 절전모드로 들어가서 전원도 직접 안꺼도 되고..
컴퓨터로 바로 출력도 가능하고.. 진짜 너무너무 좋은 것 같다..
암튼 진짜 좋다.. 난 진짜 Bambulab 프린터는 적극 추천한다..
참고로 웃긴건 내가 이걸 VRChat 하면서 일본인에게 프린터 산거 자랑한 후에 그 다음 날에 그 일본인이 A1 MINI 프린터를 바로 질렀었다.. ㅋㅋㅋㅋ
참고로 내가 이 프린터를 구매하기 전에.. 일본인 1명과 후배 1명한테도 난 Bambulab 프린터를 구매한적도 없었지만 추천해서 구매하게 만든 적도 있긴 하다. ㅋㅋ
우선.. 한가지 말하자면.. 나는 이 블로그에서 전에 Yolo V5를 학습하는 설명을 하다가 말았던 적이 있다..
2022년 (고2) 때 쓰던건데.. 중간에 그만 둬서.. 2025년 이번에 다시 써볼려 한다..!
YOLO 란?
YOLO 모델은 간단히 말하면 객체 인식 인공지능 모델 중 하나이다. (YOLO(You Only Look Once) 이건 그냥 모델의 이름;;)
YOLO는 2015년에 Yolo V1 출시로 지금까지 있으며, 현재 마지막으로 출시한건 Yolo V12이다.
특이한건 Yolo V12가 출시는 했으나 아직 Yolo 깃허브에는 V11로 등록이 되어있다.
그래서 이번껀 V11로 학습해볼 것이다. 다만 V11과 V12의 학습 방법의 차이는 그냥 이름만 변경하면 되는거라서 똑같이 진행하면 된다.
참고로.. 2022년 정도 까지만 해도 Yolo V5를 많이 사용해왔고.. 현재도 Yolo를 검색해보면 대부분 Yolo V5가 나온다..
내가 알기론 여러 기관에서도 Yolo V5를 많이 사용 한다고도 알고 있고.. 그 이유는 Yolo V5의 성능이 좋기도 하고 다른 버전에 비해 커뮤니티가 활발하기에 그렇다고 생각된다..
하지만 Yolo V11은 확실히 좋기는 하다.. 속도도 빨라졌고.. 모델 성능도 더 좋아진 것이 체감될 정도이다..
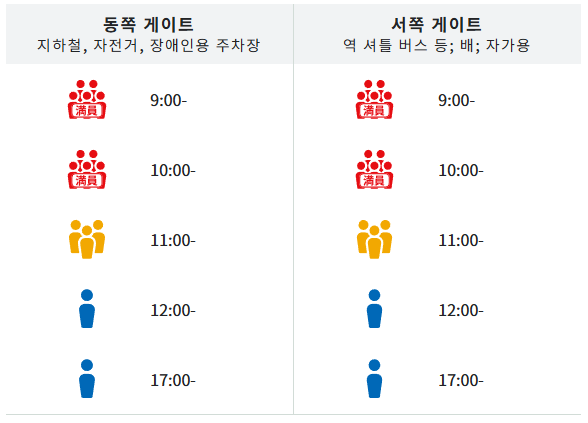
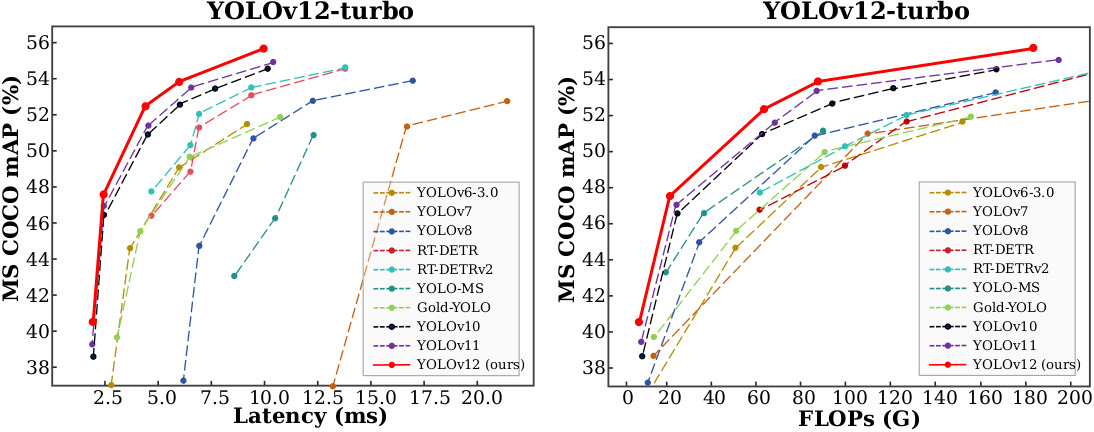
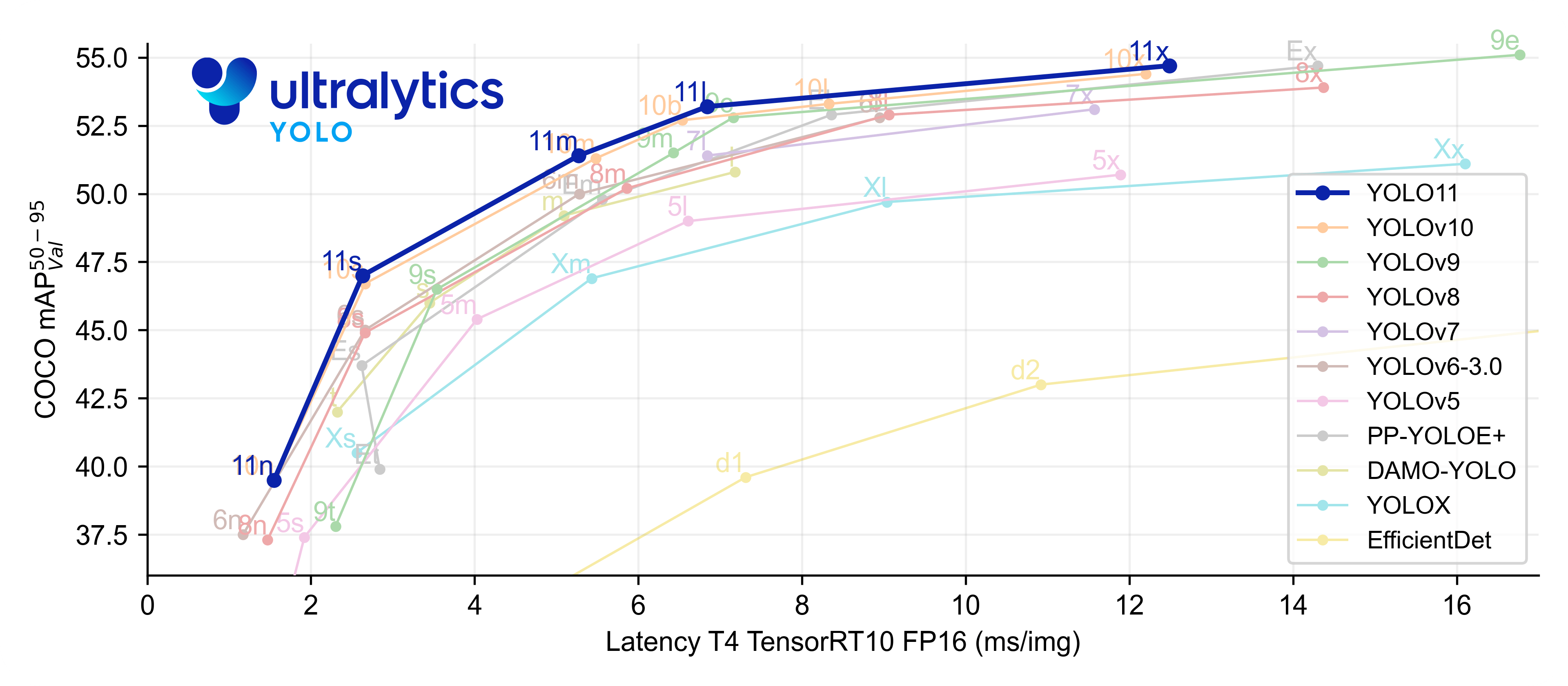
여기 표를 보면 알 수가 있는데.. 일단 첫번째 이미지는 그냥 Yolo V5는 없지만 Yolo V12는 있어서 넣은 사진이고 두번째 이미지는 Yolo V5는 있지만 Yolo V12는 없어서 같이 올렸다.
여기에서 Latency는 추론 속도이다. FLOPs는 딱히 알 필요는 없지만 연산 개수이다. 추론할 때 내부에서 몇번을 계산하는지.. 그냥 모델 크기로 이해해도 될 것 같다. Latency, FLOPs는 왼쪽으로 낮으면 좋다.
마지막으로 COCO mAP는 Yolo의 모델은 Coco 라는 데이터셋으로 학습이 되어있는데.. 그 데이터셋으로 객체 인식을 했을 때 얼마나 정확한지 라는 것이다. 높으면 좋다.
아무튼 그렇게 두고 보면 Yolo V12가 역시 좋긴 하다.. 하지만 아직 제대로 출시는 안한 것 같으니.. 이번에는 넘어가는데..
Yolo V11과 Yolo V5를 비교하면 확실히.. Yolo V11를 안쓰기에는 성능이 꽤 차이난다는 것이다.
모델 크기
그리고 저 위에 사진을 보면 각 모델 뒤에 n, s, m, l, x 이건 모델의 크기이다.
이게 각 모델의 크기이다.
Nano, Small, Medium, Large, X-Large의 앞 글자를 딴 것이다.
모델이 커질 수록 속도가 느리지만.. 정확도는 올라간다. 하지만 걱정하지 않아도 될껀.. X Large 모델까지 가는 경우는 간단한 프로젝트에선 별로 필요없다는 것이다. 보통은 Nano나 Medium 모델 정도 까지만 쓰이고 그 이외에는 진짜 제대로 예측해야한다..
몇십만장 데이터셋을 학습해서 해야한다.. 이정도일 때 정도이지.. 간단하게 예측하는 용도라면 X Large 까지 선택할 이유는 없다. 오히려 학습을 더 많이 해야하기도 하고 속도도 쓸데 없이 느리고.. 데이터셋이 충분하지 않다면.. 오히려 좋지 않다..
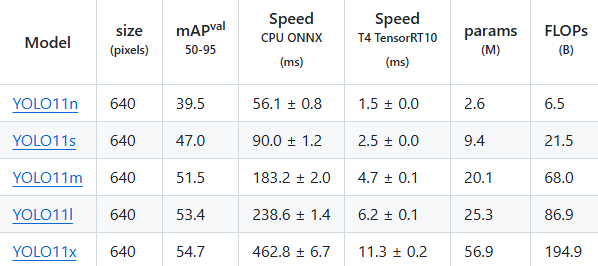
그렇기에 여기에서는 Nano로 진행할 것이다..!
참고로 저기에 보면 size라고 나와있는건.. 괄호 안에 pixels를 봤겠지만.. 말 그대로 픽셀의 개수이다..
모델의 용량이라고 생각하면 안된다.
Yolo는 다양한 픽셀을 받아서 추론할 수가 없다. 대부분의 모델도 그렇겠지만.. 이미 모델의 크기는 확정되어있기 때문에.. 딱 지정된 크기의 사진만 받아서 처리한다.
그렇기에 만약 내가 1920 * 1080의 사진을 추론할려고 하면.. Yolo V11 Nano 모델이 640 size이니 1920 * 1080px를 640 * 640px으로 변경한 후 모델로 넣어서 추론을 한다는 것이다. 마찬가지로 270 * 320px 이런 이미지를 넣으면 강제로 640 * 640px 이미지로 변경해서 추론을 한다.
작은 객체 탐지..?
이러면 한가지 의문이 들 수 있다.. 만약 큰 해상도의 이미지에서 작은 객체를 탐지할려는 경우.. 이미지가 축소되고 객체가 손실되어 작아지는 경우 탐지하기가 어려운거 아니야? 라고 생각할 수 있는데.. 정답이다.
Yolo 로는 작은 객체를 탐지하기가 매우 어렵다. 대부분의 인공지능 모델도 이걸 해결하기는 쉽지가 않다..
물론 모델의 이미지 입력 크기를 늘리면 되긴 한다.. 하지만 그렇게 되면 모델을 다시 처음부터 학습해야하기도 하고.. 작은 객체를 찾을 순 있겠지만 굉장히 느리고.. 기존에 640 * 640으로 맞춰 설계된건데.. 늘려서 학습하게 되면 구조가 또 잘 안맞아.. 오히려 정확도가 떨어질 수도 있다..
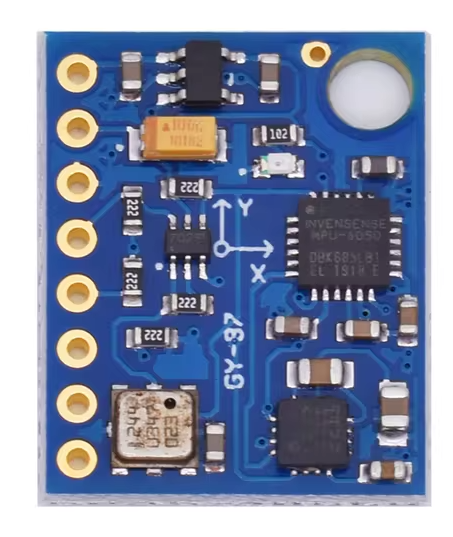
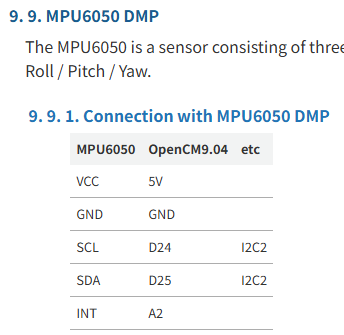
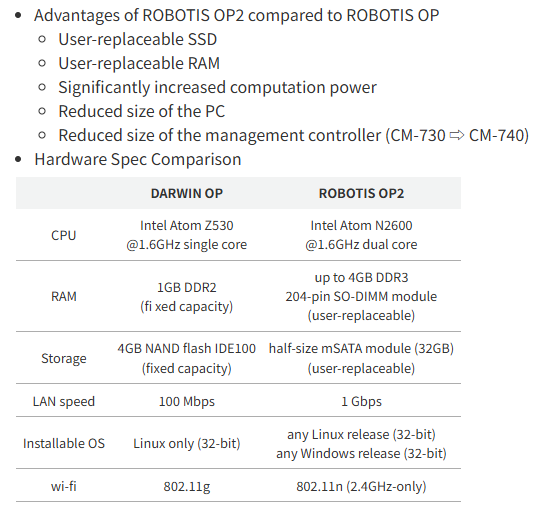
내가 아는 센서들은 이렇게 3개 정도이다. MPU6050은 자이로 3축, 가속도 3축으로 6축에 온도 센서이고 ICM 20948하고 GY 87은 자이로 3축, 가속도 3축, 지자기 3축으로 9축에 온도하고 고도 정도로 되어있다. (참고로 ICM 20948과 GY 87의 차이는 내가 알기론 측정 기판?이 3개나 1개냐 차이이다. ICM 20948이 1개인데.. 1개에서 모두 다 측정하다보니.. 비싸다.)
그렇기에 잘 선택해야한다. 근데 생각해보면.. 지자기 센서는 주변 자석에 영향을 받는다.. 아마 영향은 안받을꺼라고 생각되는데.. 모터나 주변 MPU, MCU 때문에 오차가 있을 수 있다고 생각된다.. 지자기 센서는 기존 로봇에는 없어서 사실 상관은 없지만.. 어디가 동쪽인지 북쪽인지 알아서 자동으로 어느 위치에 가야할지.. 알 수 있어서 좋을 것 같기는 하다.. 근데.. 센서에 영향이 있다면 달아도 소용이 없기 때문에.. 이건 포기해야할 것 같다..
그렇기에 일단 MPU6050으로 결정하는걸로!
MPU6050의 경우
저기 위에 걸린 링크에 설명이 되어있다.
그럼.. 다음으로..!
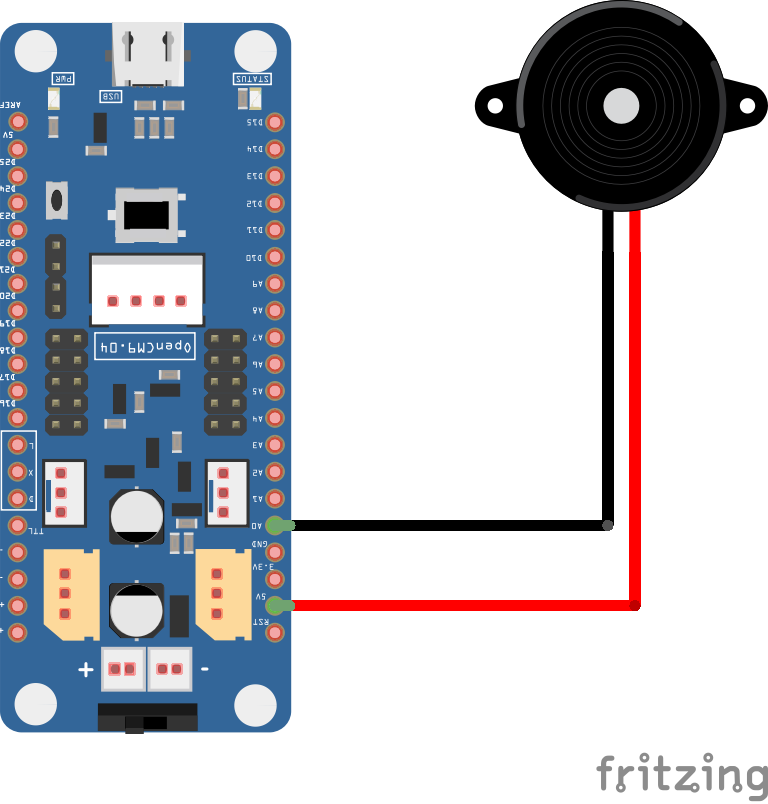
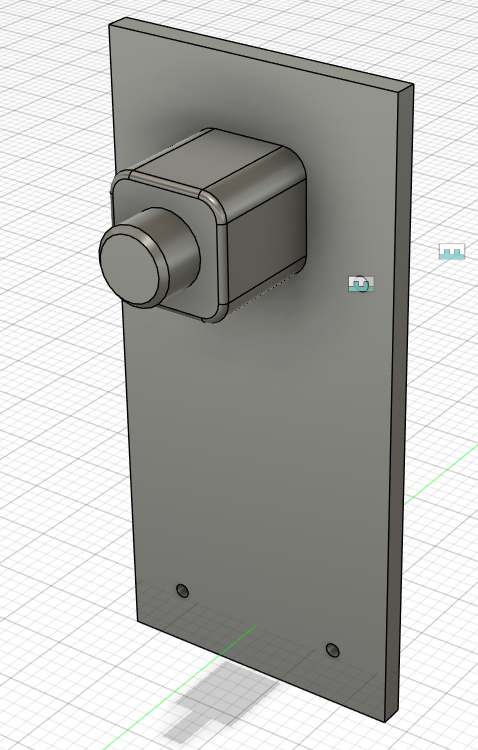
부저
부저다. 부저는 딱히 필요는 없을 것 같긴 한데.. 필요할 수도 있을 것 같긴 하다.
CM 740에 기본적으로 부저가 달려있다.. 그래서 아마도 필요하긴 할 것 같다. 뭐 전원 들어오면 들어왔다고 말할 때도 필요할 것 같긴 하니깐.. 아마 필요하지 않을까? 라고 생각된다.
부저의 경우 위에 링크에 있던건데..
이렇게 달면 된다고 한다..
가능하다면 PCB로 하면 굉장히 깔끔할 것 같긴 하다..
뭐 저건 저렇게 하고 또 다음으로
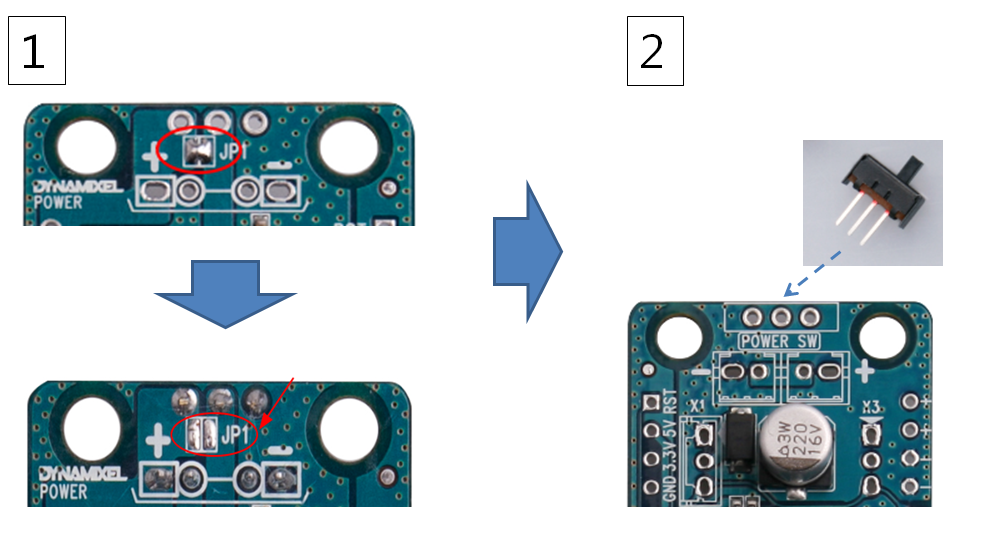
스위치
스위치이다. 스위치의 경우 Darwin OP 2 뒤에 달린 스위치와 연결해서 전원을 부팅하거나 할 것이다.
일단 OpenCM9에선 전원 스위치를 연결하기 쉽게 되어있다.
또 그 링크에 설명되어있는건데.. 이렇다. 기존 스위치를 떼고 3개 스위치를 연결하면 전원 선은 계속 연결한 상태에서 전원을 껐다 켰다 할 수 있다.
근데 저 방법도 있긴 하다만.. 지금 생각해보면.. 그냥 스위치 쪽에 어차피 배터리하고 전원 이런걸 2개 다 연결하는 방식이니깐.. 그 스위치 쪽에서 아예 전원을 공급하거나 안하거나로 해버리는게 더 나을지도 모르겠다..
만약 이렇게 되면 OpenCM9에는 전원을 계속 공급하도록 스위치를 켜야하는데.. 그렇게 되면 뭐 충격으로 꺼질 수도 있고.. 하니깐 저 위에 사진대로 JP1를 합선시키면 될 것 같다. 합선 시키면 계속 켜져있게 된다고 하는 것 같다.
다음은..
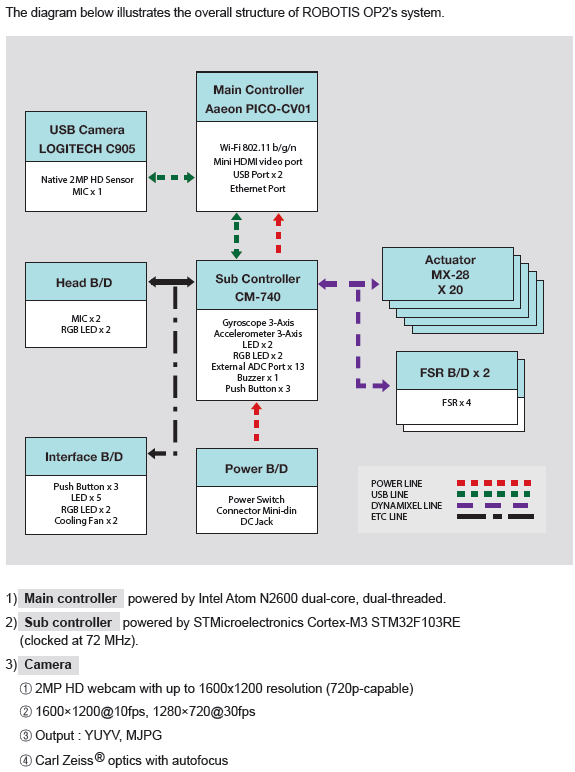
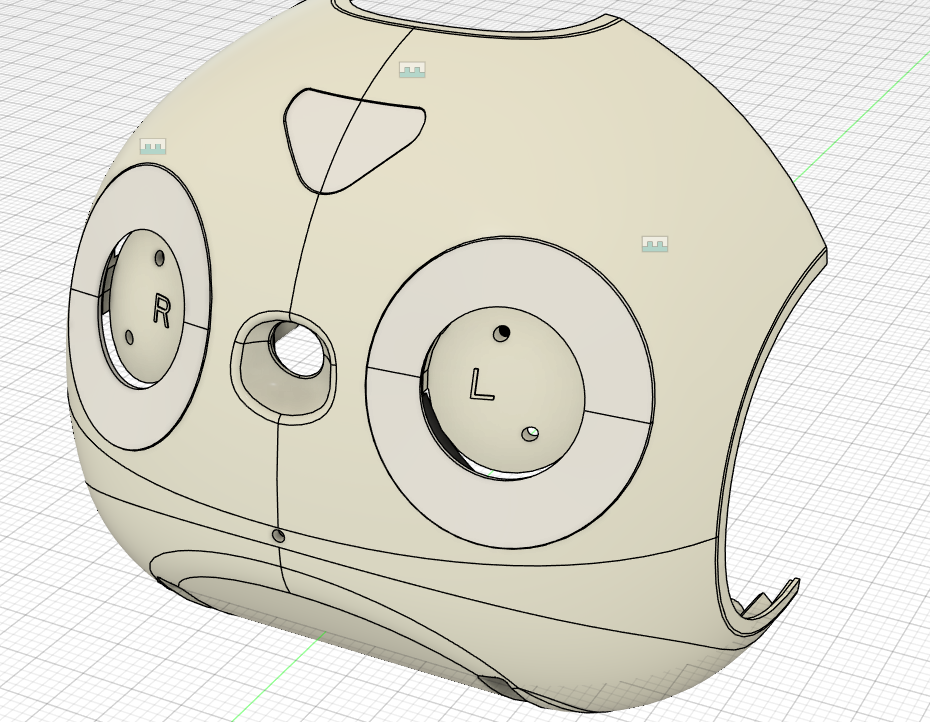
마이크 & 스피커 & 카메라
마이크와 스피커, 카메라이다!
우선 마이크의 경우는 머리에 있고 CM 740에 연결되어있다는데.. 왜 PC하고 마이크하고 연결을 하지 않은건지는 모르겠다.. 카메라에 달린 마이크는 이용하는건가..?
근데 왜 CM 740에 마이크를 연결한지는 모르겠다.. 음성 인식을 하거나 할려면 CM 740 보다는 PC에 하는게 좋았을텐데..
아마도 추측이지만.. 마이크가 머리에 있는걸 보니.. 간단한 Robi 같은 음성인식이거나 아니면 방향 인식 때문에 한게 아닐까 싶다..
만약 그런 이유라면.. 나도 방향 인식이나 간단한 인식 용도로 머리에 2개의 마이크를 달고 인공지능이나 여러 음성인식을 위한 마이크 1개를 카메라 쪽에 달아두는게 나을 것 같다.
라즈베리파이 같은 PC는 실시간 처리가 어려워서 마이크 방향 인식 하기에 부적합할테니..
그럼.. 다음으로 스피커이다!
스피커의 경우는 가슴쪽에 한개가 있던걸로 알고 있는데.. 이건 어차피 라즈베리파이의 오디오 잭에 연결할꺼니깐.. 여긴 그냥 넘어가도 될 것 같다.. 스피커는 작은걸로 아무거나 전력에 맞는걸로 할 듯 하다.
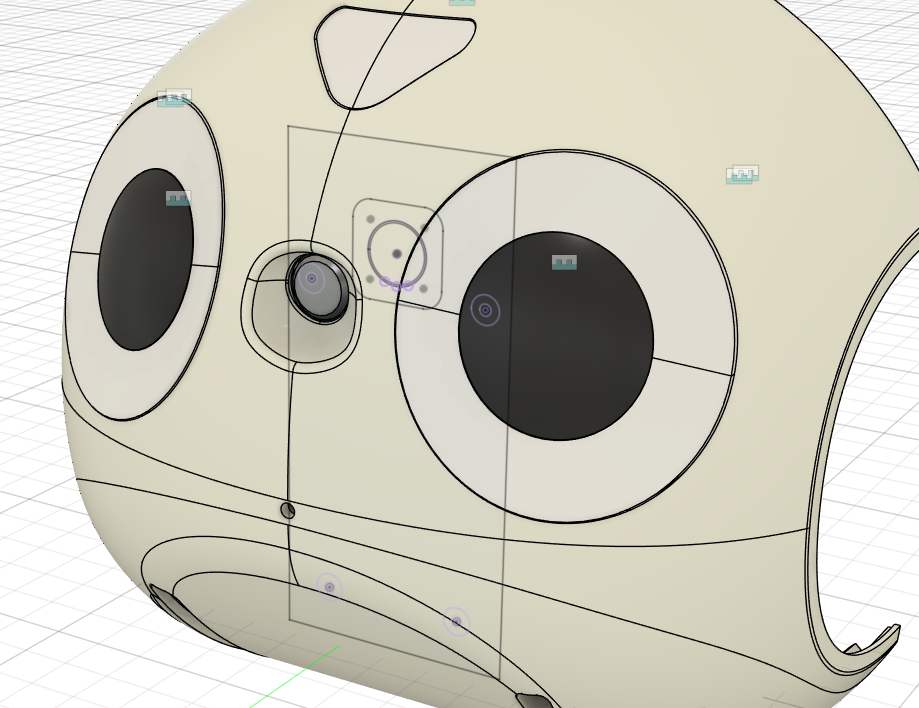
그럼 이번엔 카메라인데..
카메라가 가장 큰 문제이다..
일단 위 사진을 본다면 카메라의 경우 로지텍의 C905를 사용하는데..
이걸 사용한다고 한다.. 아마도 이거를 분해해서 머리쪽에 장착하는 듯 하다..
저런 카메라는.. 현재로선 구하기가 어렵다. 그래서 저 카메라는 못 사용하니.. 다른걸 찾아야 하는데.. 비슷한 크기의 카메라가 한쪽에 몰린 카메라를 사용하거나.. 그냥 라즈베리파이 카메라를 사용하거나.. 해야할 것 같다.. (라즈베리파이 카메라는 선이 특이해서.. 제대로 될일은 없겠다만..)
암튼 이것도 고민을 좀 많이 해야겠다..
잘 들어갈만한 카메라가 없을려나...
뭐 이건 나중에 고민해야겠다..
그럼 다음으로..
LED & 버튼 & 쿨링팬
LED나 버튼, 쿨링팬들인데
버튼은 3개, LED는 7개, RGB LED는 9개? 였던가이다. (메인 PC 파워 버튼의 경우 굳이 필요없을꺼 같다. 라즈베리파이는 전원선만 공급하면 바로 켜지니깐..)
뒷쪽에 버튼 3개는 OpenCM9에 어떻게든 연결하면 될 것 같고.. LED도 연결 잘 하면 될 것 같은데.. 나는 아마도 RGB LED로 할 것 같다.. 정보 표시용 말고도 추가적으로 화려한 LED 들도 표시해보고 싶기에.. 하는데 만약 그렇게 되면.. RGB를 표현하는데 핀 3개 * LED 갯수 7개를 해서 총 21개의 LED 핀이 필요하게 되는데.. 이 경우 OpenCM9에 모두 연결하는건 아마 힘들것이다..
그래서 나는 아마도 WS2812B 이런걸 사용하지 않을까 싶다.
1개의 선으로 모든 RGB LED를 제어하는게 가능해지니깐.. 저걸로 할 것 같다.
머리의 LED는 내가 알기론 한쪽 눈에 4개의 LED가 있고 하나의 전력으로 연결하고 해서 총 LED 갯수는 9개이고 제어 가능한건 3개일텐데..
이것도 마찬가지로 한쪽 눈알에서도 개별적으로 모든 LED를 각각 제어해서 회전하는 LED나 이런걸로 해보고 싶기도 하니 이것도 마찬가지로 WS2812B를 사용해서 할 듯 하다..
만약 그렇게 되면.. 필요한 선은 2개!
뒷판에 연결할꺼 1개와 머리에 연결할꺼 1개로..
추가로 쿨링팬은 그냥 PWM에 연결하면 될 것 같고..
제일 걱정은 과연 이 모든걸 연결했을 때.. 전력이 충분할까이다.. 모터까지 함께 구동해야하니깐.. 흐어어...
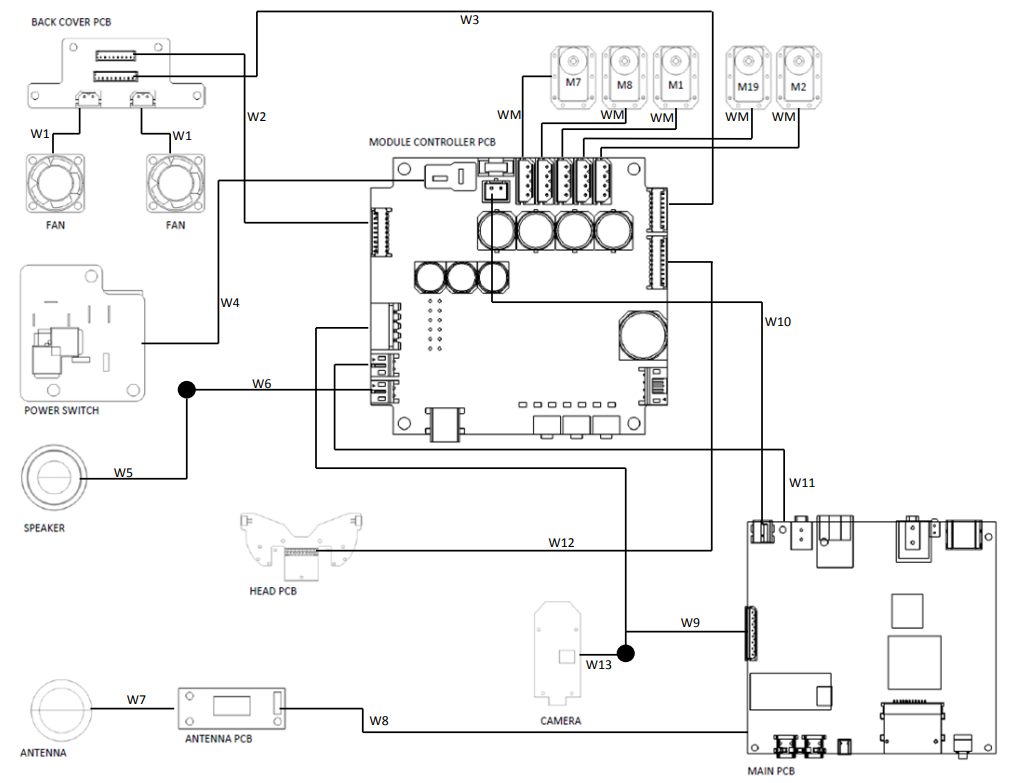
이번 글에선 로봇에 들어갈 컨트롤러(메인 컨트롤러, 서브 컨트롤러)에 대해서 글을 작성할 것이다!
나는 현재 로봇을 팔, 다리는 모두 만들었다. 근데 아직 가슴 부분은 못 만들었다. 이유는 가슴 부분은 컴퓨터의 외부 장치와 연결하는 커넥터? USB 같은게 직접적으로 닿아야 하기 때문에 아직 만들지 못하고 있다.. 참고로 글은 아직 안올렸지만.. 팔과 다리 프레임은 3일만에.. 프레임을 모두 다시 만들었다. 오차는 0.5mm 정도일려나..
근데.. 어쨋든 가슴 부분을 만들어야 하는데.. 한가지 문제가 생겼다.. 서브 컨트롤러, 메인 컨트롤러의 들어갈 부분의 총 크기가 27mm인 2.7cm 정도 밖에 안된다는 것이다.. 근데 저 제품들은 전부 단종되었고 구할 수도 없다. 뭐 어떻게 찾으면 구할 순 있겠지만.. 나중에는 고장나거나 했을 때 애매하고.. 똑같은걸 여러대 만들 수도 있으니깐.. 새로 판매하는 부품으로 만들어야 한다.
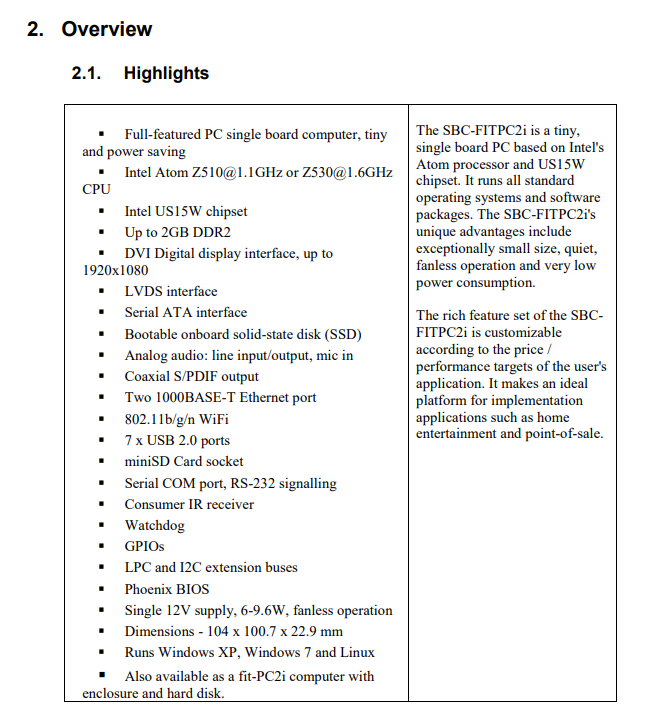
여기에서도 왜 SBC-FitPC2i를 사용한다고 하는지는 제대로 알 수 없다.. 아마도 가능성이라면.. 제품 Github에 들어가보면 Darwin OP 1과 Darwin OP 2의 정보가 같이 있는데 OP 2는 프레임만 따로 제공하고 아마도 나머지 문서들은 전부 OP 1이라서 그것 때문에 저걸로 적어놓은 것이거나..
아니면..! OP 2 메인보드는 실제로 판매하지 않고 OP 2 전용으로 나와서 판매는 안하니 이름을 어떻게 하기도 어려워서 그냥 OP 1에 있던 이름으로 했었던지.. 그러지 않았을까 싶다..
어라.. 지금 글을 쓸려고 정보를 찾아보던 중에.. Darwin OP 2의 메인보드를 알아냈다..
그리고 요즘 나오는 미니 PC가 더 가격이 싸고 좋기도 하기 때문에.. 사용하기는 어렵다..
Darwin OP 2 컴퓨터 정보와 대체재
그렇게 되면 다시 정리하면 Darwin OP 2에 사용되는 컴퓨터는!
Sub Controller : CM-740
Main Controller : Aaeon PICO-CV01
이렇게 정리할 수가 있다.
근데 문제는 저것들이 전부 단종되었다는 것이다..
그래서 대체재를 찾아야 하는데..
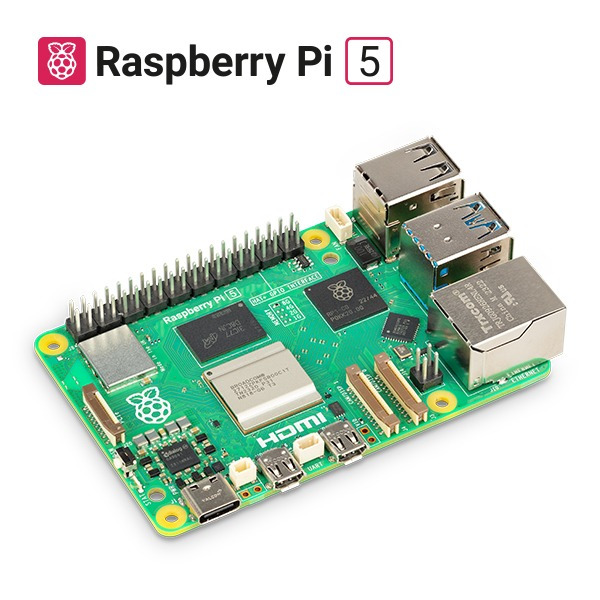
일단 생각해둔 것이.. 메인컨트롤러는 라즈베리파이로 하는 것이고..
서브 컨트롤러는 로보티즈에서 판매하는 제품을 쓰는 것이다.
그러기 위해 일단 메인컨트롤러가 라즈베리파이랑 성능이 어느정도 차이나는지 봐야 한다. 딱히 비교 할필요 없긴 한데.. 내가 하고 싶어서이다.
ChatGPT 한테 부탁했다.
항목
PICO-CV01 (N4200 기준)
Raspberry Pi 5 (8GB)
우위
우위 정도 (대략 %)
CPU
Intel Pentium N4200 (4C/4T, 1.1~2.5GHz)
ARM Cortex-A76 (4C, 2.4GHz)
Raspberry Pi 5
+20~30% (멀티/싱글 성능)
GPU
Intel HD Graphics 505
VideoCore VII (OpenGL ES 3.1, Vulkan 1.2)
Raspberry Pi 5
+30~50% (그래픽 성능 및 최신 지원)
RAM
DDR3L 4GB (최대)
LPDDR4X 8GB
Raspberry Pi 5
+100% 용량, +50~70% 속도
스토리지
eMMC, mSATA (옵션)
microSD + PCIe Gen2 SSD
Raspberry Pi 5
+30~50% 유연성, 속도는 SSD에 따라
USB
2x USB 3.0, 1x USB 2.0
2x USB 3.0, 2x USB 2.0
비슷함
-
디스플레이 출력
HDMI 1.4
2x micro-HDMI 2.0 (4K60 지원)
Raspberry Pi 5
+50% 이상 (해상도/프레임레이트)
네트워크
듀얼 GbE LAN
1x GbE LAN + Wi-Fi 5 + BLE 5.0
용도에 따라 다름
PICO-CV01 (유선), RPi5 (무선 포함)
GPIO/확장성
산업용 GPIO, RS232/RS485 등
40핀 GPIO + PCIe + CSI/DSI
용도에 따라 다름
산업용은 PICO-CV01, DIY는 Pi5
운영체제 호환성
Windows 10/11, x86 Linux
ARM Linux, 일부 Android 등
PICO-CV01 (x86 호환)
+100% 범용성 (x86 기반 OS)
소비 전력
6~12W
3~6W (Peak 시 12W)
Raspberry Pi 5 (효율)
-30~50% 전력 소비 (일반 사용 시)
크기
PICO-ITX (100x72mm)
85.6x56.5mm
Raspberry Pi 5 (더 작음)
-25% 크기
가격
약 $180~220 USD (옵션에 따라)
약 $80~100 USD
Raspberry Pi 5
-50% 가격
이렇다. 라즈베리파이 5가 그냥 압도해버린다.. (라즈베리파이는 Windows는 못 깔지만 애초에 Darwin OP가 리눅스를 사용한다.)
충분히 써도 될 것 같다. 문제는 높이인데.. 높이도 사실 상관없을 것 같다.. Darwin OP 2의 PC는 제일 높은 부품이 USB 2개 끼우는 그곳일텐데.. 라즈베리파이도 마찬가지로 제일 높은 부품이 USB 2개 그걸로 알고 있다.. 그래서 높이는 문제 없고.. 좀 더 작아서.. 한쪽으로 모으기도 쉽다는 것을 알 수 있다!
근데 한가지 걱정되는건.. 그거다..
외부 연결 커넥터가 한쪽으로 모여있지 않다는 것이다.. 지금 내 생각은 USB와 랜선 포트 쪽을 뒷면으로 해서 할 생각인데.. 전원선, HDMI 연결 커넥터 부분이 저 쪽으로 되어있어서.. 실제로 설치를 하면.. HDMI를 사용하지 못하게 될 것이다.
물론 방법이 완전 없는건 아니다.. 짧은 HDMI 연장 선을 구입해서 다는 것이다. 아마 나는 이 방법을 쓰지 않을까 싶다..
만약 연장선 사지 않고 해결할려면 아마도 라즈베리파이 CM4나 CM5를 사서 커스텀 PCB로 커넥터를 한쪽으로 모으는걸 해야하지 않을까 싶은데.. 굳이 그렇게 까지 하고 싶지는 않다.. 애초에 내가 PCB를 그렇게 만드는 방법을 모른다..
어쨋든 이렇게 되어서 장점이 생겼다!
쓸 수 있는 공간이 넓어졌다!
그럼 라즈베리파이 5 8GB 모델로 결정! (12만원이지만.. 뭐 이정도야 쓸 수 있지.. 머..)
아니면.. 그냥 4GB도 상관은 없을 것 같긴 한데.. 어카지.. (LLM 같은 것도 돌려보고 싶다..)
그럼 이제 서브 컨트롤러를 정해야한다..!
서브컨트롤러 대체제
일단 CM 740 처럼 자이로 센서 다 있고하는 부품은 이제 안파는 것 같다..
그래서 일반 컨트롤러를 구입하고 자이로 센서를 추가하거나 하는 방식으로 해야할 것 같다..
일단 왜 그런진 모르겠지만.. 로보티즈에서 지금 파는 저렴한 서브 컨트롤러들은 두께가 좀 두껍고.. 사용하기에 애매하다..
일단 서브 컨트롤러의 내가 가지고 있는 CM 530을 사용할 순 있겠지만.. 라즈베리파이와의 연결이 어렵고 두께도 두껍고 버튼들이 옮길 수가 없다..
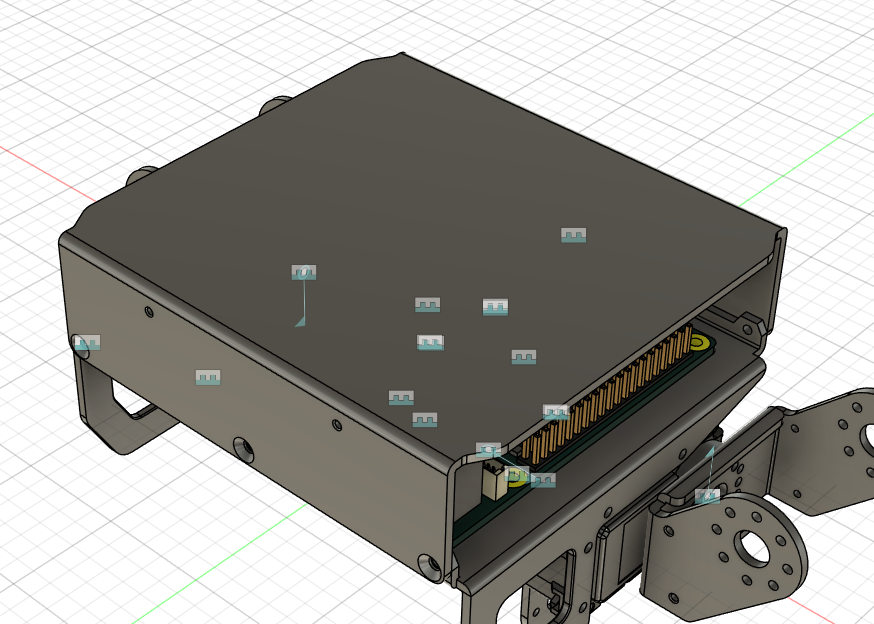
일단 너비는 상관없는데.. 높이가 가장 문제다.. PCB 확장판 위에 아두이노를 끼우는 것 같은거니.. 과연 저 안에 들어갈지가 가장 의문이다..
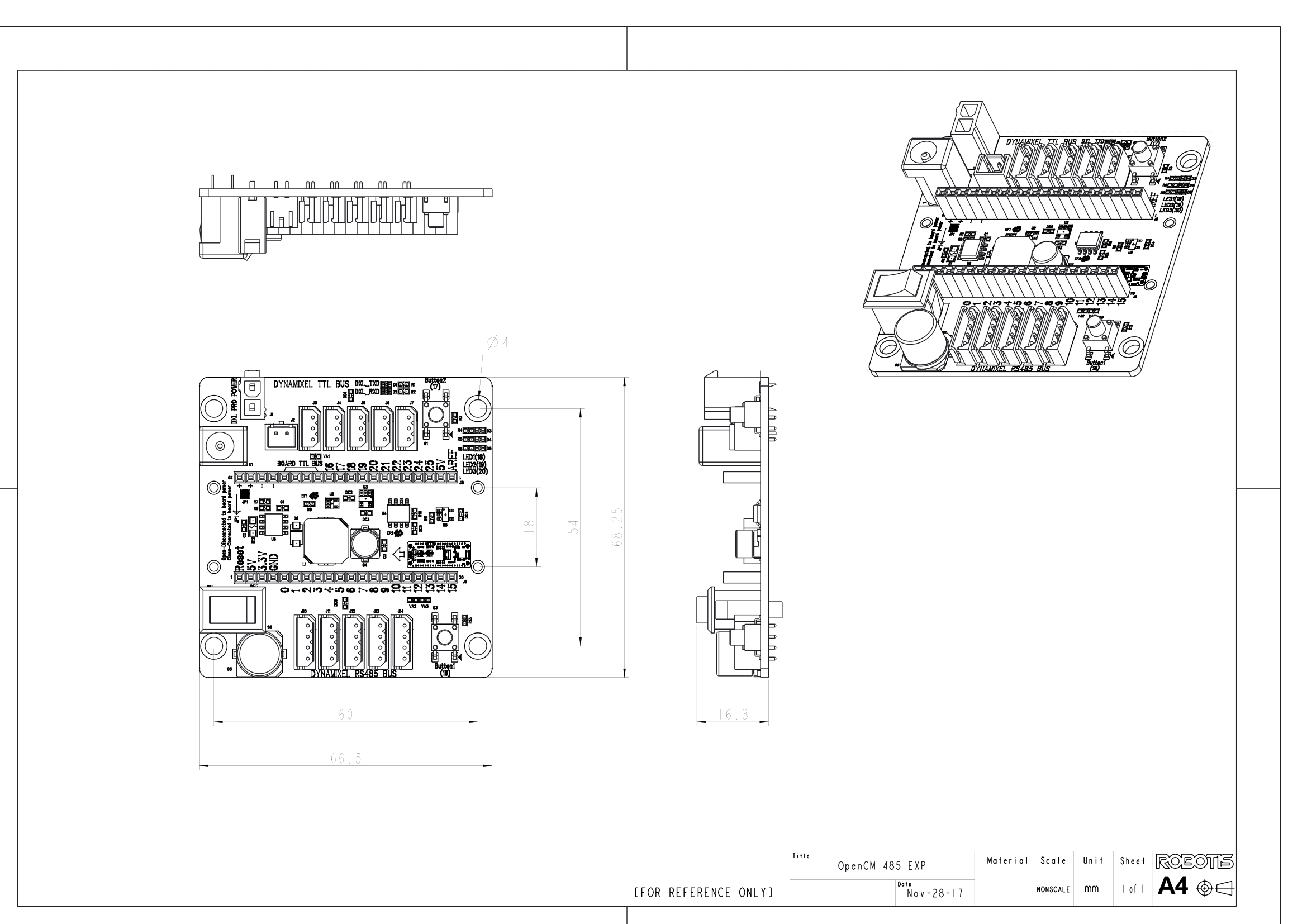
일단 간단하게 내가 찾은걸로 정리해본다면..
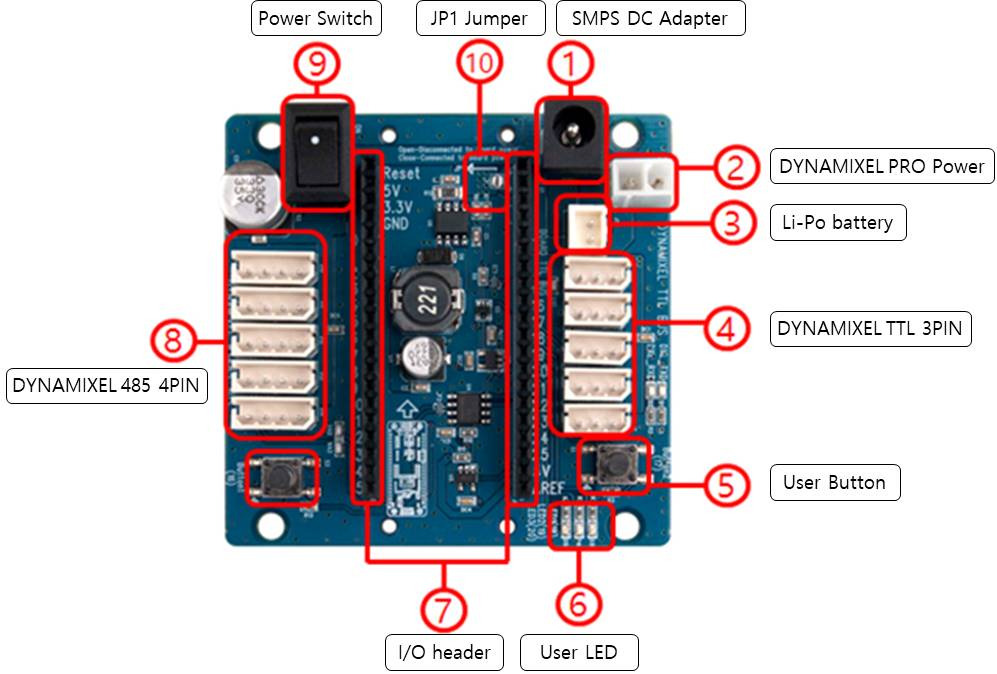
저 I/O header 위에 서브컨트롤러를 끼우는건데.. 그것 때문에 높이가 살짝 걱정된다.
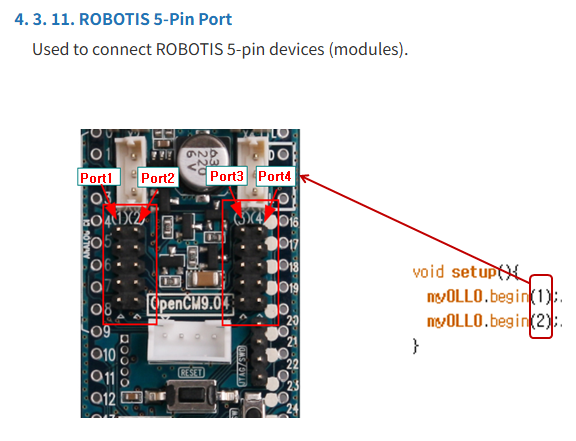
그리고 일단 AX-12A를 바로 끼울 수 있는 3핀 커넥터 5개를 제공한다는 것이다! 그래서 머리, 왼쪽 팔, 오른쪽 팔, 왼쪽 다리, 오른쪽 다리 이렇게 5개 사용하면 될 것 같다.
그리고 아쉬운 점 들은.. USER LED 위치가 이미 고정됬다는 것, 유저 버튼도 고정된 것.. 파워 스위치, DC 어댑터도 고정됬다는 점이다..
LED나 버튼들은 뭐.. 어차피 따로 달면 되니깐 상관은 없겠는데.. 가장 큰 문제는 파워 어댑터랑 스위치이다..
난 저거를 Darwin OP와 똑같이 아래에다가 배치하고 싶은데.. 그게 안되니깐.. 어케 할지 고민인데.. 아마 지금 생각나는건 PCB를 만들어서 그걸 아래에 배치하고 저 확장보드의 전원은 항상 키고 확장보드의 Dynamixel PRO Power 커넥터에 만든 PCB와의 전원선을 연결해서 만든 PCB에서 스위치를 껐다 키면서 제어하는게 맞지 않을까 싶다..
뭐 그리고.. 아마 부족하진 않겠지만.. 추가로 커넥터가 필요하면 아래껄 쓰면 될 것 같다..
아 참고로 U2D2도 찾아봤었는데.. 그거의 경우 그냥 펌웨어 업로드 하는게 아닌.. USB로 다이나믹셀 제품 전체를 제어하는건데.. 그거 같은 경우 실시간 처리가 어렵기 때문에.. U2D2는 못 쓸 것 같다.. 보통 로봇들은 MPU + MCU 구조로 하니깐.. 근데 어쨋든 MPU 만으로는 제어가 즉각적으로 되긴 힘들기 때문에 MPU + MCU 구조로 OpenCM9를 쓰는 것이 가장 적합할 것 같다..
최대한 자세히 찾을 수록 좋고.. 그거에 맞춰서 모델을 수정할 수 있기 때문에 반드시 거의 모든 차이점을 찾아야 한다..
일단 다행인점은 같은 회사의 모터이기 때문에.. 호환되는 것들이 꽤 많다..
일단 난 이미 다른 점을 거의 다 찾았기에 이거에 대해 글을 남겨볼려 한다.
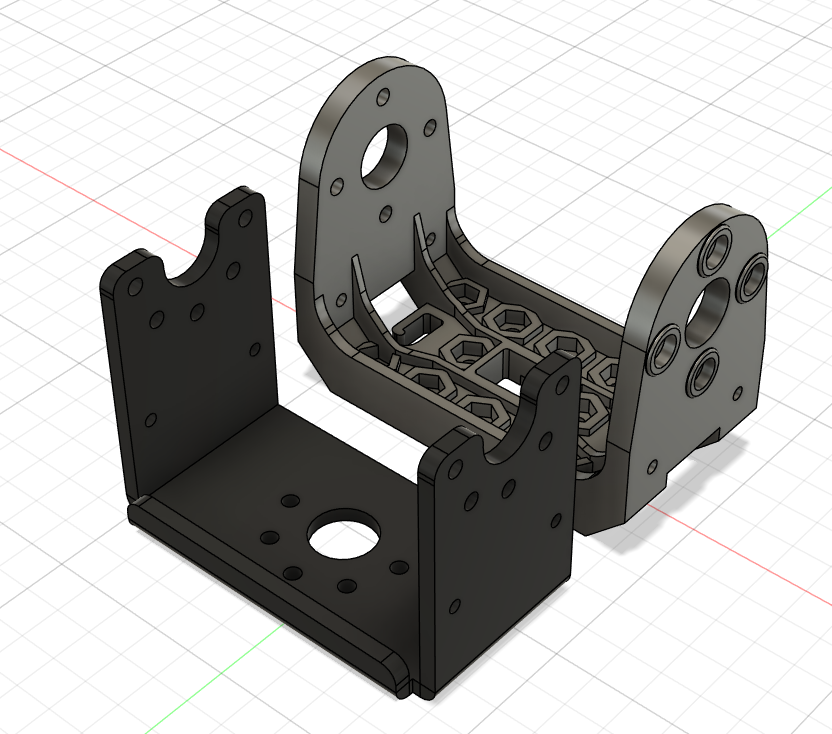
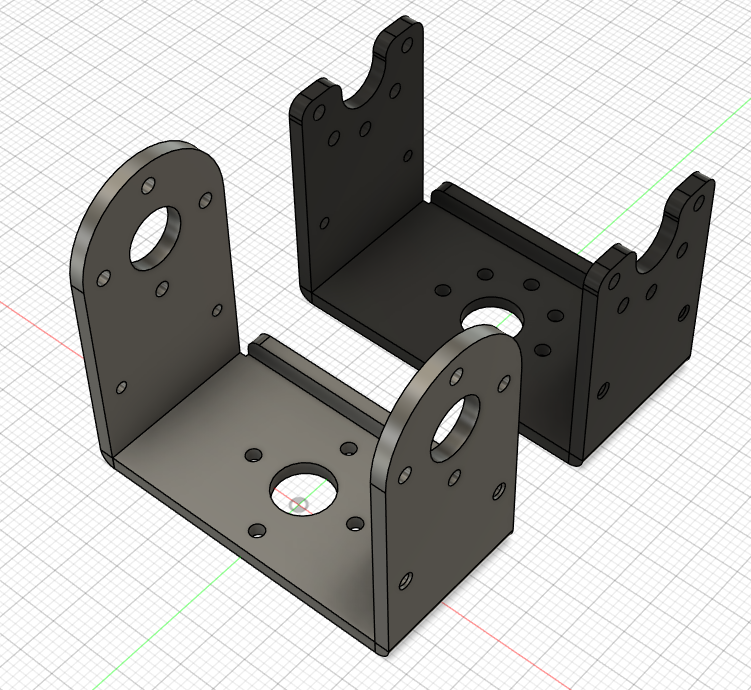
우선 차이점을 찾기 전에 쉽게 찾기 위해 기본 프레임 부터 AX 12A에 맞게 만들어봤다.
그래서 난 처음에는 그냥 바이올로이드 조립할 때 썼던 FP04 제품의 Step 파일을 다운받아서 비교해봤다.
검은색이 Darwin OP의 프레임이고 회색이 바이올로이드의 프레임이다.
모터를 함께 확인해서 본 결과.. 일단 모터 회전하는 그 베어링인지 혼인지 그거가 MX 28T는 8개인 반면 AX 12A는 4개 뿐이라는 것이다..
그렇기에 문제가 생기는 것이 2가지가 생각났다.
첫번째는 고정하는 구멍이 별로 없어서 검은색 프레임 처럼 반쪽만 그 디스크에 끼워버리면 3개 나사 밖에 사용을 하지 않으므로 쉽게 박살나거나 풀려버릴 가능성이 있다는 것이다.
두번째는 검은색 프레임은 45도 회전해서 고정할 수 있게 되어있는 반면 회색 프레임은 무조건 4개라서 90도 씩으로 밖에 회전을 못한다. 뭐 어차피 이에 대한건 사실 상관없다. 문제가 생기면 구멍을 더 만들면 되는거고.. 왠만해선 디스크를 회전시켜서 끼우거나 하면 되는거라 아마 문제는 안될꺼다.
그리고 검은색은 하단에 동그란 구멍으로 다른 베어링이나 이런걸 끼울 수 있게 되어있는 반면.. 회색껀 그냥 사각형으로 되어있다.
뭐 쓰임새가 달른 것 뿐이긴 한데.. 저것도 맞춰야 하는게 좋으니.. 그냥 수정하면 되긴 하는데.. 한가지 특이한건 반원으로만 구멍이 있다는 것이다. 근데 위에서 말했듯이 고정력을 단단히 해야하기 때문에 원형 모두를 뚫어야 할 것 같다.
그리고.. 가장 큰 차이점은 두께인 것 같다..
검은색 프레임은 철이고 회색 프레임은 플라스틱이다 보니 두께가 다른 것 같은데.. 그거에 맞춰서 회색은 여러가지 박살나기 쉬운 것도 보강되어있다.
일단 뭐.. 검은색 프레임대로 만들겠지만.. 분명히 보강이 필요하긴 하다.. 보강을 안하면 약해서 바로 부서질 것이 뻔하다.. 아니면 3D 프린터 출력물이 아닌 외주 맡기거나 하면 강하겠지만.. 근데 나한텐 그럴 돈은 없으니..
일단 검은색 프레임대로 만들고.. 모든 가상조립 까지 끝난 후에.. 다른 부품이 방해받지 않는 선에서.. 최대한 보강할 부분을 보강하면 될 것 같다.
마찬가지로 두께도 검은색 프레임대로 할 것이다.
솔직히 이렇게 안하고.. 그냥 회색 프레임 가지고 여러번 조립하다 보면 비슷하게 Darwin OP를 만들 수 있긴 할텐데.. 그렇게 하면.. 그냥 다른 제품이 되버리고.. 내가 가지고 싶던 Darwin OP가 아니게 되버리니.. 최대한 검은색 프레임 대로 만들려는 것이다..
일단 위에 말한 정보대로 새로 부품을 만들었다.
솔직히 Fusion 몰라도 이런건 쉽게 만들 수 있을 것이다.. 그냥 검사로 규격 재서 그대로 만들면 되는거라;;
어쨋든 최대한 똑같이 만들고.. 반영해야할 문제를 최대한 반영했다.
내가 잰 규격들은 대충 이렇다.
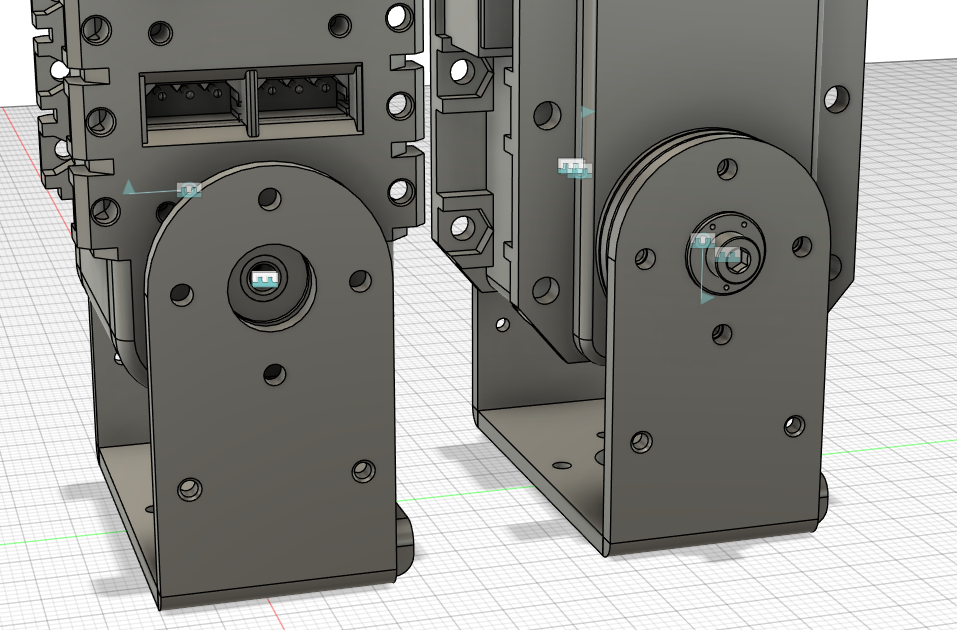
그리고 이번에는 모터를 고정하는 차이를 알아야 한다.
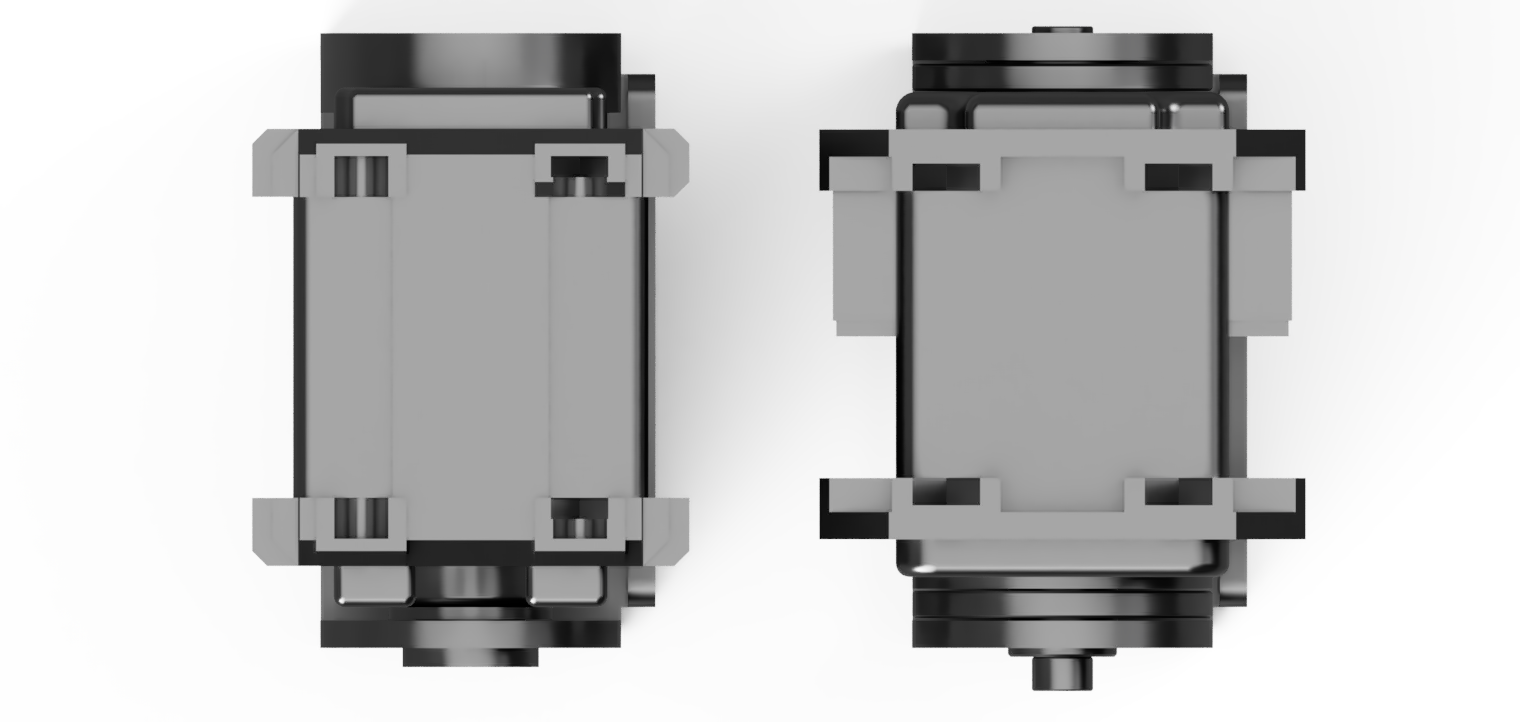
MX 28T는 견고하게 앞뒤로 정확하게 고정하는 반면.. AX 12A는 앞쪽만 견고하게 고정하고 나머지는 나사 1개로 고정하는 방식으로 되어있다.
그래서 일단 차이를 알기 위해서.. 새로 만든 부품에 2개의 모터를 각각 결합해봤다.
일단 앞쪽은 문제 없이 끼울 수 있을 것 같다.
문제는 뒤쪽이다..
요 부분.. 엄연히.. 다르다..
이거에 뭐 베어링이나 혼을 추가로 장착해서 끼우는 것도 어렵다.. 맞는 부품이 없기에.. 물론 3D 프린터 부품으로 할순 있겠지만.. 나사를 고정하는 방식이 어려워지기 때문에.. 바이올로이드에서 고정하는 방식대로 해야할 것 같다.
바이올로이드의 경우 그냥 나사 1개 큰걸로 중앙에다가 와셔하고 이런걸로 고정하는 방식인데..
내가 미리 해본 결과.. 크기가 안맞다..
그래서 그냥 그.. 와셔하고 부쉬인가? 그거를 원래는 약할까봐.. 추가로 구매해서 할려고 했는데.. 이렇게 크기가 안맞아버리니.. 이것도 3D 프린터 출력물로 대체해야할 것 같다.. 근데.. 이 부분은 잘 회전해야하기 때문에.. 좀 정교할 필요가 있다..
매끄럽게 출력한다거나.. 근데.. 내 3D 프린터로는 그게 어렵다..
아마도 이걸 실제로 만들 때는 그냥 새로운 Bambulab 3D 프린터를 구입해서 아마 만들 것 같긴 하다.. 그래서 문제가 그나마 줄어들긴 하겠지만.. 그것도 매끈하지 않을 껀 마찬가지이기 때문에.. 만약 정 안되면 DLP나 SLA 프린트 서비스를 통해서.. 부품을 받거나 해야할 것 같다.. 뭐 일반 3D 프린터 출력물로 된다면 오히려 좋고..
그래서 수정했던 프레임에 맞춰서 와셔하고 부쉬 크기도 변경했다.
그랬더니.. 이렇게 완벽하게 됬다!
아마.. 이렇게 고정해도 문제는 없겠지만.. 혹시나라도.. 문제가 발생할 순 있다..
근데 뭐.. 어쩔 수 없다.. 내 실력의 한계이기 때문.. 그래서 그냥 일단 이대로 해보는걸로..
참고로 저 와셔하고 부쉬 크기는 그냥 조금씩만 크기를 줄인 것 뿐이다.
그렇게 해서.. 프레임이나 이런걸 제대로 준비했으니.. 제대로 비교해보자면..!
우선.. 이대로 보자면.. 몇가지 문제점이 보인다.
모터의 맨 아래쪽의 나사 구멍 2개 부분은 위치가 거의 동일해서 상관없을 것 같은데.. 자세히 보면.. 약간 사이 간격이 달라보인다..
그리고 아아아주 살짝 세로 축으로 약간 차이가 나는 것 같다.. 뭐 근데 세로 축이 저정도 살짝 차이나는건 상관 없을 것 같긴 한데..
문제는 사이 간격이다..
실제로 규격을 재보니.. 2개 원의 중심의 거리를 재본 결과..
MX 28T : 17mm
AX 12A : 16mm
로 1mm 정도 차이난다.. 일단 이렇게 되었다는건 거의 전체 프레임을 수정해야하는건 확실해졌다.. 옆에껀 어차피 수정해야하는거고..
그리고 혹시나 해서 나사 구멍도 재봤는데.. 나사가 실제로 들어갈 수 있는 구멍은..
MX 28T : 2.7mm
AX 12A : 2.2mm
으로 살짝 차이난다.. 근데 어차피 저정도 차이는 별거 아니다.. 그냥 나사만 바꾸면 되는거라서.. (저거 반지름 아니고 지름이다.)
그리고 옆쪽 비교인데.. 옆쪽은 솔직히 비교 안해도 될 것 같다. 눈으로 봐도 너무 차이가 난다..
그냥 저건 프레임 수정할 때 규격에 맞춰서 어떻게든 수정하면 되는 문제일 것 같기에.. 따로 적진 않겠다..
그리고.. 한가지 선 끼우는 방식도 다른데.. 그것도 어케 맞추지 하는 걱정이 들긴하는데.. 어떻게든 맞춰봐야지 뭐..
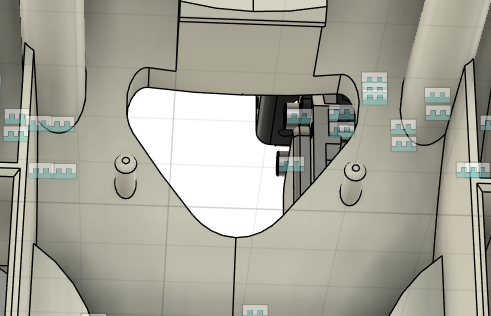
그리고.. 지금 제일 걱정인 하단 부분이다.. 왼쪽이 AX 12A이고 오른쪽이 MX 28T이다..
하하하하... 눈으로 봐도 다른 점은.. 길이다..
AX 12A가 좀 더 두껍다.
그.. 프레임을 붙이는 부분이라 해야하나.. 그 부분이 더 두꺼워서.. 모델 수정이 좀 어려워질 수도 있을 것 같다라는 생각이 든다..
이렇게 저 사이의 간격을 비교해본다면..
MX 28T (앞쪽) : 7.05mm
AX 12A (앞쪽) : 7.00mm
MX 28T (뒤쪽) : 7.95mm
AX 12A (뒤쪽) : 6.00mm
으로.. 약 2mm 정도 더 AX 12A가 더 두껍다는걸 알 수 있게 된다..
근데 다행인건.. 대부분 저 옆쪽을 사용해서 연결하는건.. 모터와 모터를 연결할려고 사용하는 부품이 꽤 많은데.. 그 덕분에.. 수정이 많이 어렵지는 않을 것 같다.. 그리고 다행인건.. 프레임은 상관없는데.. 커버를 저거 때문에.. 수정해야한다 했으면.. 아마.. 포기할 가능성이 높았을 것이다..
왜냐면.. 커버는 곡선 때문에.. 수정하기가 좀 빡칠 것 같다..
지금 걱정되는건..
이 부분도 있는데.. 뭐.. 이 부분은 다행히도 바이올로이드에서도 같은 방식으로 조립하는 방법이 있어.. 그걸로 참고하면 될 것 같긴 해서.. 그나마 다행이고..
이 프레임이 엄청 얇은.. 이거를 도데체 어떻게 보강해서 잘 안부서지게 만드냐도 걱정이고..
할게 확실히 너무 많아지는 것 같다..
뭐 일단 최대한 해보겠지만....
그리고! 위에서도 말했듯이 모터에 끼우는 나사 크기가 다르기 때문에.. 나사들을 바로 어떤걸 끼운다 이걸 정할 수가 없다.. 인서트 너트가 필요한 곳에는 인서트 너트도 배치해야하고.. 여러 수정할게 많아지기 때문에..
최대한 프레임을 결합해서 맞춘 후..
마지막에 나사랑 인서트 너트랑 골라서 배치해야할 곳에 배치해야할 것 같다..
그리고 일단 아마도 이거 후 글 부터는 진짜로 올라올지는 장담을 못하겠지만.. 최대한 도전은 해볼 것이다..
그리고 중간에 포기하거나 군대를 가야할 수도 있다..
그래도.. 되는데까지.. 해봐야할 것 같다..
아무튼 이번 모터 비교로 많은 정보를 알았다..!!
최대한 이것에 맞춰서 만들면 될 것 같긴 하고..
그리고 원래 나는 메모장에 글로 정리를 하는데.. 이번꺼는 어려워서 티스토리로 글을 남겨보고 있다..
티스토리 글을 쓰는게 더 오래 걸려서.. 좀 별로긴 한데.. 확실하게 남길 수 있으니.. 어쨋든.. 이걸로 아마 되는대로 계속 올릴 것 같긴 하다..
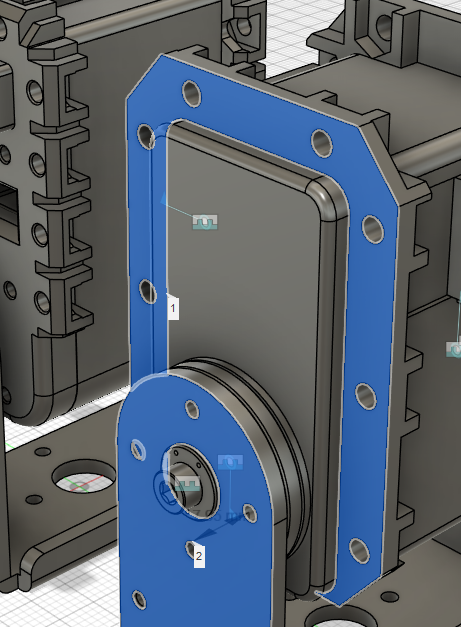
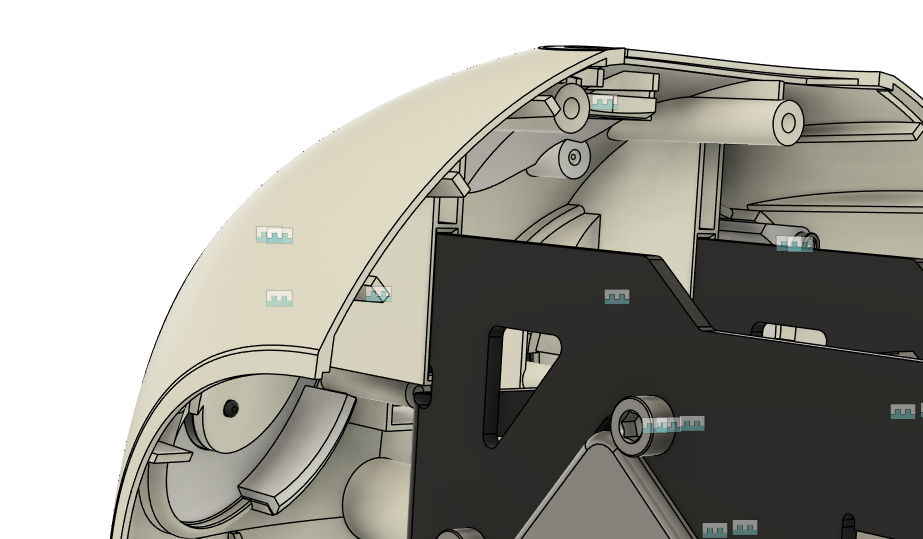
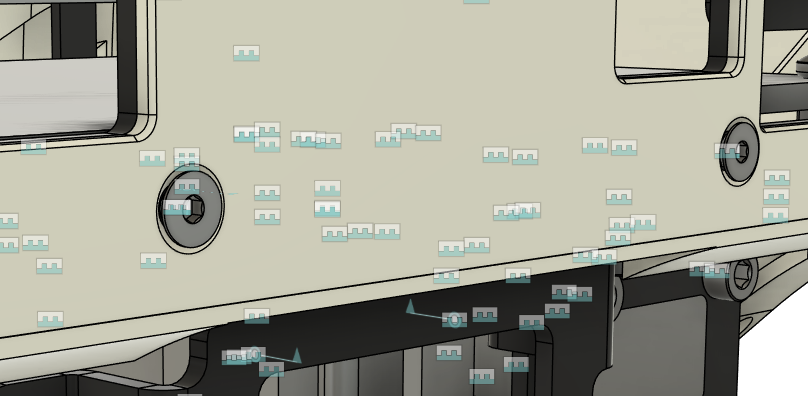
그리고.. 백 판을 먼저 본체에 고정을 해야할 것 같다.. 아래 처럼 해서 먼저 백판을 고정시켰다.
나사 구멍에 맞췄다.
그 후 서로 백판과 앞판의 나사 구멍을 맞춰서 고정시켜줬다.
그리고 위에 나사 구멍 맞춰서 끼웠다.
그 후 나사를 끼워주면 몸통 부분도 완성이다.
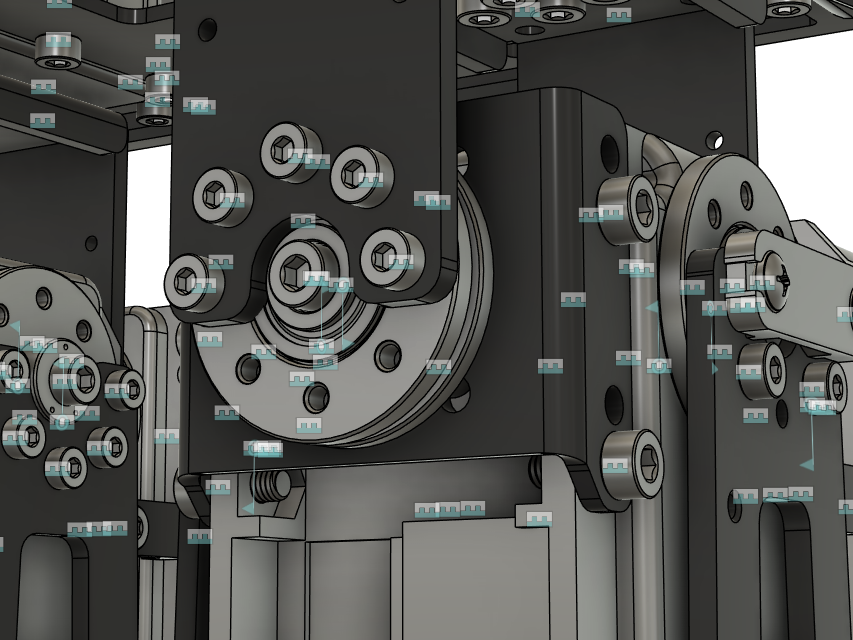
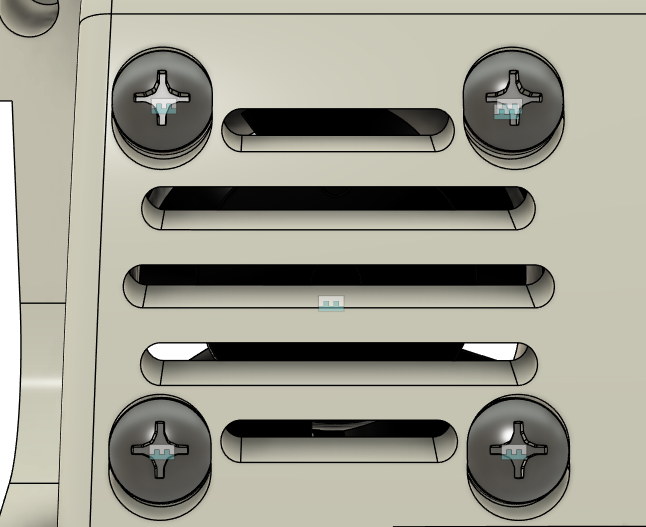
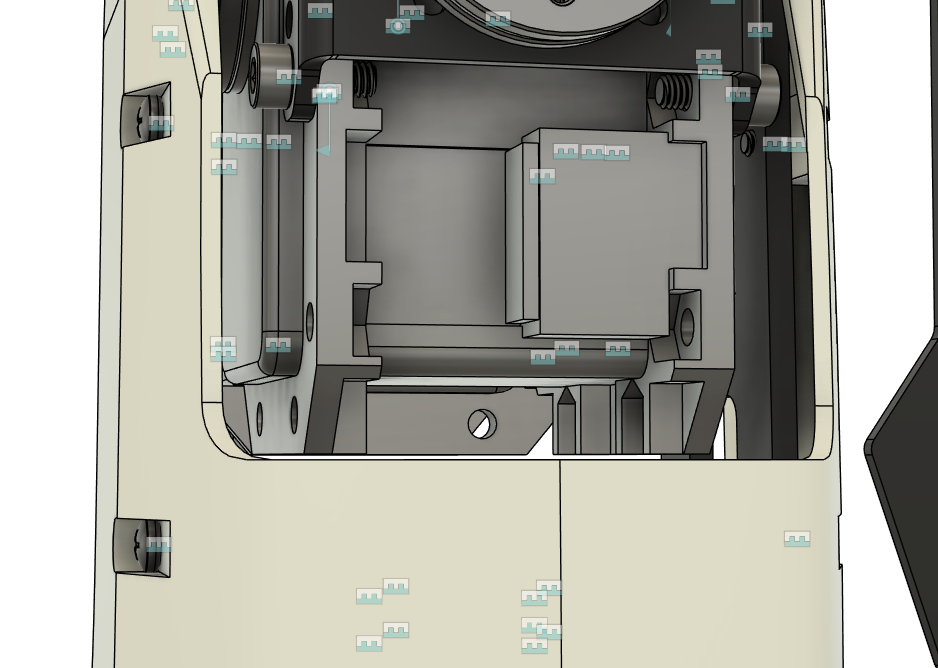
근데 또 문제가 생겼다..
나사 끼우는 부분을 보면.. Flat 나사다.. 그래서 S20을 추가해서 S2 처럼 M2지만 6mm로 했다. 원래는 4mm가 맞지만.. 6mm로 하는 이유는.. 나사선을 만들 수 없기 때문에..
그렇게 해서 이렇게 했다. 약간 띄어진 느낌이 있지만.. 뭐 이건 넘어가고..
이제 한가지 생각해야할껀.. 너트다.. 만약 여기에서 진짜 반대에서 너트로 끼워버리면.. 발생하는 문제는.. 커버라서 마무리 단계이기 때문에 너트를 고정한 채로 저걸 고정할려면 너트 구멍을 만들거나 하는게 아니라면 하기가 어려울 것 같다..
또한 나중에 문제가 생겨서 풀 때도 부수지 않는 이상.. 풀려고 하면 계속 너트도 같이 돌아서 문제가 생기고 말 것이다..
그래서 만약 한다면.. 아마 저기는 인서트 너트로 고정할 수 있도록 모델을 수정해야할 것 같다..
암튼 그렇게 해서 몸통 부분도 완성했다.
그리고 참고로 스피커 부분은 안했다. 해야하기는 하는데.. 저것도 마찬가지로 부품을 만든다 하더라도.. 끼우는 방법을 몰라서.. 암튼..
저건 나중에 완성할 때.. 하는걸로 하고.. 일단 넘어가야될 것 같다.
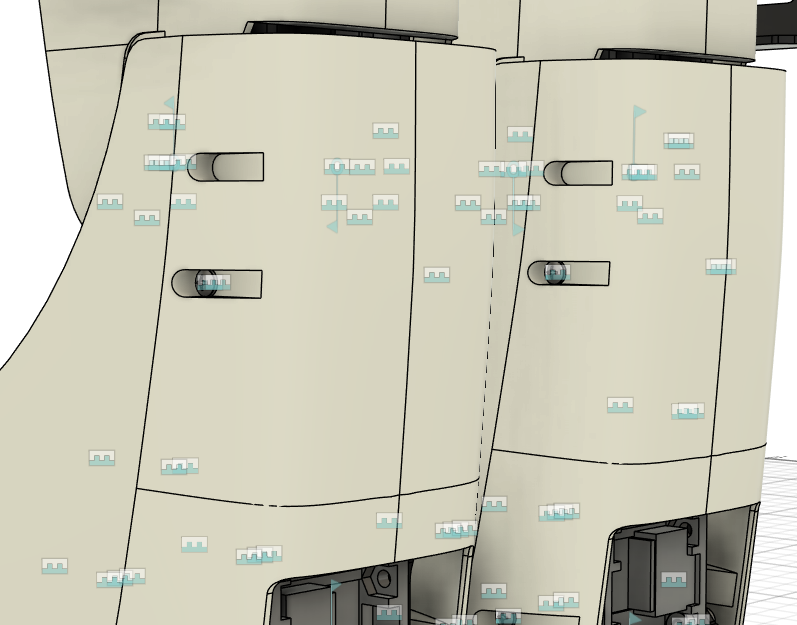
이제 다리를 조립해보고 있는데..
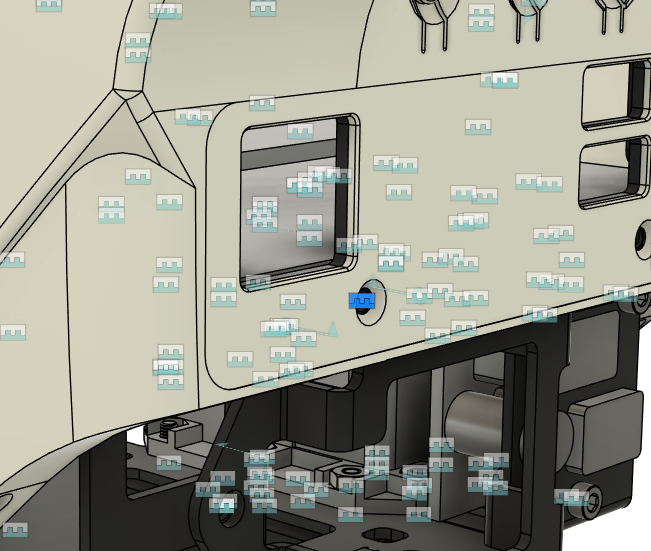
또 문제가 생겼다.. 여기서도 프레임에 나사선이 있어야 하는데.. 없으니깐.. 인서트 너트로 해야하는데.. 이렇게 되면 애초에 처음부터 모든 프레임에 인서트 너트를 넣고 할 수도 있었다고 생각은 되지만.. 또 생각해보면 나사로 고정하는건 강하게 하는거고.. 인서트 너트로 저렇게 고정하는건 강하게 고정하는건 아니라서.. 커버 부품에는 적합할 것 같다.. 참고로 저기에는 너트로 고정하고 풀고도 쉽긴 하겠지만.. 문제는 모터가 걸릴 수도 있을 것 같다.. 그렇기 때문에 인서트 너트로 고정할 수 있게 프레임을 수정하고 해야할 것 같긴 한데.. 일단.. 뭐.. 이렇게 해야할 것 같다.. 나중에 인서트 너트 납작한거라도 구해서 해보는걸로..
여긴 발쪽 부분인데.. 여기도 마찬가지로 인서트 너트로 해야할 것 같다..
이쪽 부분도 마찬가지로 인서트 너트로 해야할 것 같고..
마찬가지로.. 이 팔 부분도 인서트 너트로 해야할 것 같다...
뭐 어쨋든 인서트 너트로 하는건 나중에 모델 수정할 때 참고하면 되는거고..
전부다 완성한 결과는!
우선.. 굉장한 결합 부분..
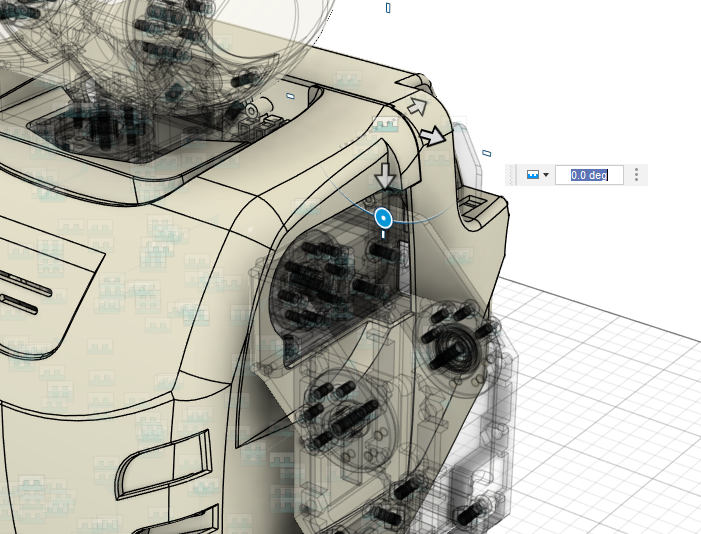
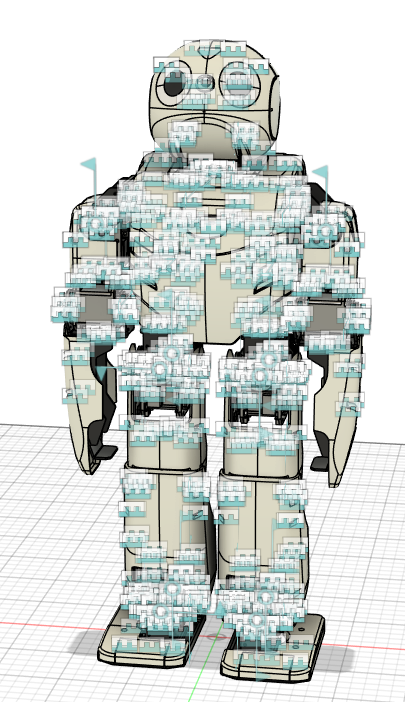
그리고 마지막으로!
굉장히 귀여운 Darwin OP 2 가상 조립 완성!!!!!!!!
진짜 Fusion의 렌더링 기능.. 빠르고 확실히 좋다..
진짜 너무 귀엽게 생겼다..
인터넷에 있는 것들은.. 거의 대충 3D로 만들어졌거나 실제 제품을 촬영한 것 뿐인던데..!! 거의 완벽하게 똑같은 것을 3D와 이미지로 만들어본게 되버렸다!
암튼..!!
아직 실제로 만들어보기 전이지만.. 굉장히 뿌듯하다!
어쨋든.. 이번 커버를 만들면서 알게된건 수정해야할 부분이 많아졌다는 것이다..
인서트 너트를 박아야 할 부분을 찾긴 찾았는데.. 어떻게 박아야 할지.. 굉장히 막막하긴 하다..