
이번 글에선 로봇에 들어갈 컨트롤러(메인 컨트롤러, 서브 컨트롤러)에 대해서 글을 작성할 것이다!
나는 현재 로봇을 팔, 다리는 모두 만들었다. 근데 아직 가슴 부분은 못 만들었다. 이유는 가슴 부분은 컴퓨터의 외부 장치와 연결하는 커넥터? USB 같은게 직접적으로 닿아야 하기 때문에 아직 만들지 못하고 있다.. 참고로 글은 아직 안올렸지만.. 팔과 다리 프레임은 3일만에.. 프레임을 모두 다시 만들었다. 오차는 0.5mm 정도일려나..

근데.. 어쨋든 가슴 부분을 만들어야 하는데.. 한가지 문제가 생겼다.. 서브 컨트롤러, 메인 컨트롤러의 들어갈 부분의 총 크기가 27mm인 2.7cm 정도 밖에 안된다는 것이다.. 근데 저 제품들은 전부 단종되었고 구할 수도 없다. 뭐 어떻게 찾으면 구할 순 있겠지만.. 나중에는 고장나거나 했을 때 애매하고.. 똑같은걸 여러대 만들 수도 있으니깐.. 새로 판매하는 부품으로 만들어야 한다.
그래서 일단 Darwin OP에 들어가는 보드를 다시 확인해봤다!
https://emanual.robotis.com/docs/en/platform/op2/getting_started/
Introduction
emanual.robotis.com
일단 이곳에 자세히 나와있다.
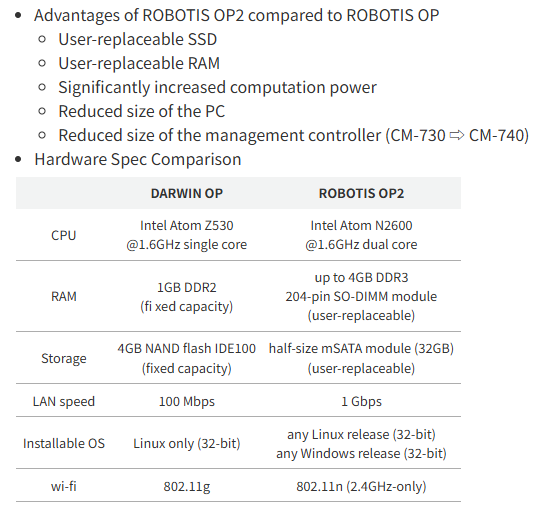
이 부분인데.. 나는 Darwin OP 2를 만들 것이기 때문에 확인을 해볼려 했지만.. 아쉽게도 Darwin OP 2의 PC나 이런 정보들이 안나와서.. Darwin OP 1으로 찾아야 한다.
Darwin OP 1의 경우 CM 730을 사용하고..
PC는 https://www.compulab.com/products/sbcs/sbc-fitpc2i/
SBC-FITPC2i Single Board Computer | Compulab
Product Highlights Full-featured PC single board computer, tiny and power saving Intel Atom Z530 CPU @ 1.6 GHz Intel US15W chipset Up to 2GB DDR2 Optional 4GB flash disk DVI & LVDS display interfaces, up to 1920x1080 SATA HDD interface PXE (Ethernet) and U
www.compulab.com
이걸 사용하는걸로 알고 있다.
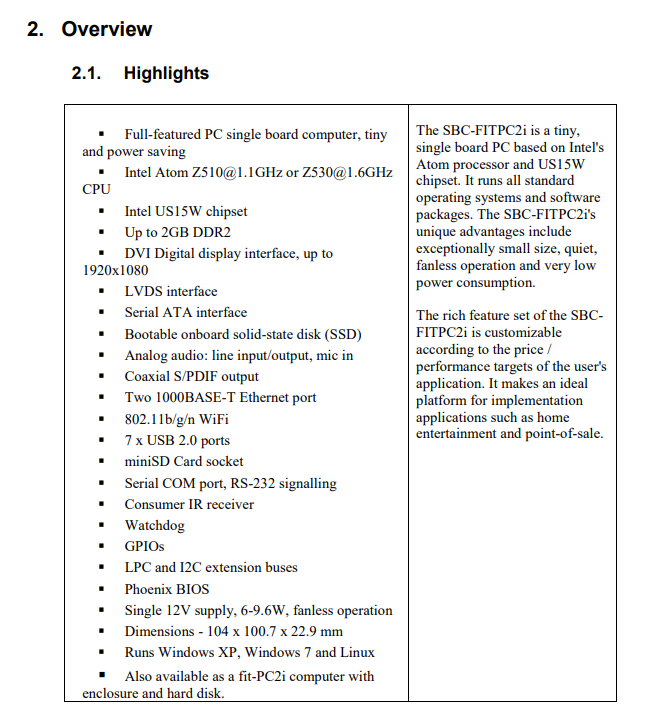
PDF 문서 찾아보면 이런 것도 찾아볼 수 있는데 여기에 보면 SBC FITPC2i를 사용한다고 되어있다.
참고로 Darwin OP 2도 한번 다시 찾아봤는데.. 이런건 찾을 수 있었다.
https://www.innovativeelectronics.com/index.php?pg=ie_pdet&idp=496
Innovative Electronics
Spesifikasi Robotis OP2: Main controller berbasis komputer (built-in PC) SBC-fitPC2i: Processor Intel Atom Dual Core N2600 @ 1.6 GHz. Chipset Intel US15W. RAM 4 GB DDR3. Internal Disk Storage 32 GB mSata module. miniSD untuk External Storage. Phoeni
www.innovativeelectronics.com
여기에서도 왜 SBC-FitPC2i를 사용한다고 하는지는 제대로 알 수 없다.. 아마도 가능성이라면.. 제품 Github에 들어가보면 Darwin OP 1과 Darwin OP 2의 정보가 같이 있는데 OP 2는 프레임만 따로 제공하고 아마도 나머지 문서들은 전부 OP 1이라서 그것 때문에 저걸로 적어놓은 것이거나..
아니면..! OP 2 메인보드는 실제로 판매하지 않고 OP 2 전용으로 나와서 판매는 안하니 이름을 어떻게 하기도 어려워서 그냥 OP 1에 있던 이름으로 했었던지.. 그러지 않았을까 싶다..
어라.. 지금 글을 쓸려고 정보를 찾아보던 중에.. Darwin OP 2의 메인보드를 알아냈다..
https://emanual.robotis.com/docs/en/platform/op2/getting_started/#system-block-diagram
Introduction
emanual.robotis.com

여기를 보면 나와있는데..
Aaeon PICO-CV01를 사용한다고 나와있다..
https://www.aaeon.com/en/product/detail/pico-itx-boards-pico-cv01

이 제품이다..
드디어 찾았다.....
근데 찾았어도.. 어차피 이 제품도 단종되었을 꺼기 때문에.. 사용할 순 없다..
그리고 요즘 나오는 미니 PC가 더 가격이 싸고 좋기도 하기 때문에.. 사용하기는 어렵다..
Darwin OP 2 컴퓨터 정보와 대체재
그렇게 되면 다시 정리하면 Darwin OP 2에 사용되는 컴퓨터는!
- Sub Controller : CM-740
- Main Controller : Aaeon PICO-CV01
이렇게 정리할 수가 있다.
근데 문제는 저것들이 전부 단종되었다는 것이다..
그래서 대체재를 찾아야 하는데..
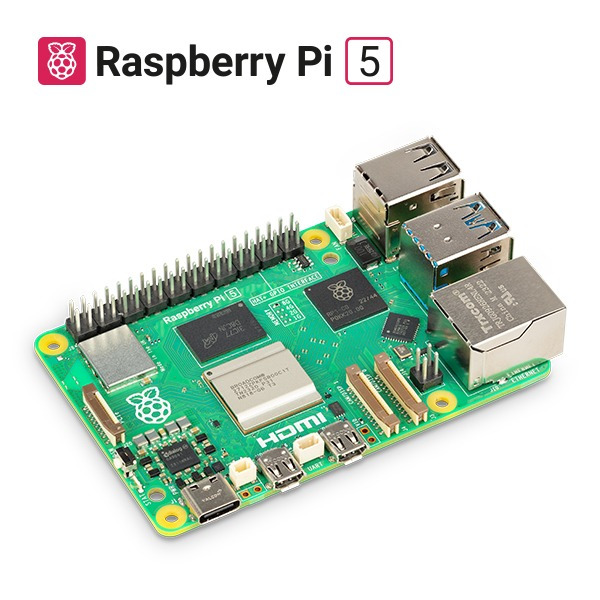
일단 생각해둔 것이.. 메인컨트롤러는 라즈베리파이로 하는 것이고..
서브 컨트롤러는 로보티즈에서 판매하는 제품을 쓰는 것이다.
그러기 위해 일단 메인컨트롤러가 라즈베리파이랑 성능이 어느정도 차이나는지 봐야 한다. 딱히 비교 할필요 없긴 한데.. 내가 하고 싶어서이다.
ChatGPT 한테 부탁했다.
| 항목 | PICO-CV01 (N4200 기준) | Raspberry Pi 5 (8GB) | 우위 | 우위 정도 (대략 %) |
| CPU | Intel Pentium N4200 (4C/4T, 1.1~2.5GHz) | ARM Cortex-A76 (4C, 2.4GHz) | Raspberry Pi 5 | +20~30% (멀티/싱글 성능) |
| GPU | Intel HD Graphics 505 | VideoCore VII (OpenGL ES 3.1, Vulkan 1.2) | Raspberry Pi 5 | +30~50% (그래픽 성능 및 최신 지원) |
| RAM | DDR3L 4GB (최대) | LPDDR4X 8GB | Raspberry Pi 5 | +100% 용량, +50~70% 속도 |
| 스토리지 | eMMC, mSATA (옵션) | microSD + PCIe Gen2 SSD | Raspberry Pi 5 | +30~50% 유연성, 속도는 SSD에 따라 |
| USB | 2x USB 3.0, 1x USB 2.0 | 2x USB 3.0, 2x USB 2.0 | 비슷함 | - |
| 디스플레이 출력 | HDMI 1.4 | 2x micro-HDMI 2.0 (4K60 지원) | Raspberry Pi 5 | +50% 이상 (해상도/프레임레이트) |
| 네트워크 | 듀얼 GbE LAN | 1x GbE LAN + Wi-Fi 5 + BLE 5.0 | 용도에 따라 다름 | PICO-CV01 (유선), RPi5 (무선 포함) |
| GPIO/확장성 | 산업용 GPIO, RS232/RS485 등 | 40핀 GPIO + PCIe + CSI/DSI | 용도에 따라 다름 | 산업용은 PICO-CV01, DIY는 Pi5 |
| 운영체제 호환성 | Windows 10/11, x86 Linux | ARM Linux, 일부 Android 등 | PICO-CV01 (x86 호환) | +100% 범용성 (x86 기반 OS) |
| 소비 전력 | 6~12W | 3~6W (Peak 시 12W) | Raspberry Pi 5 (효율) | -30~50% 전력 소비 (일반 사용 시) |
| 크기 | PICO-ITX (100x72mm) | 85.6x56.5mm | Raspberry Pi 5 (더 작음) | -25% 크기 |
| 가격 | 약 $180~220 USD (옵션에 따라) | 약 $80~100 USD | Raspberry Pi 5 | -50% 가격 |
이렇다. 라즈베리파이 5가 그냥 압도해버린다.. (라즈베리파이는 Windows는 못 깔지만 애초에 Darwin OP가 리눅스를 사용한다.)
충분히 써도 될 것 같다. 문제는 높이인데.. 높이도 사실 상관없을 것 같다.. Darwin OP 2의 PC는 제일 높은 부품이 USB 2개 끼우는 그곳일텐데.. 라즈베리파이도 마찬가지로 제일 높은 부품이 USB 2개 그걸로 알고 있다.. 그래서 높이는 문제 없고.. 좀 더 작아서.. 한쪽으로 모으기도 쉽다는 것을 알 수 있다!
근데 한가지 걱정되는건.. 그거다..
외부 연결 커넥터가 한쪽으로 모여있지 않다는 것이다.. 지금 내 생각은 USB와 랜선 포트 쪽을 뒷면으로 해서 할 생각인데.. 전원선, HDMI 연결 커넥터 부분이 저 쪽으로 되어있어서.. 실제로 설치를 하면.. HDMI를 사용하지 못하게 될 것이다.
물론 방법이 완전 없는건 아니다.. 짧은 HDMI 연장 선을 구입해서 다는 것이다. 아마 나는 이 방법을 쓰지 않을까 싶다..
만약 연장선 사지 않고 해결할려면 아마도 라즈베리파이 CM4나 CM5를 사서 커스텀 PCB로 커넥터를 한쪽으로 모으는걸 해야하지 않을까 싶은데.. 굳이 그렇게 까지 하고 싶지는 않다.. 애초에 내가 PCB를 그렇게 만드는 방법을 모른다..
어쨋든 이렇게 되어서 장점이 생겼다!
쓸 수 있는 공간이 넓어졌다!
그럼 라즈베리파이 5 8GB 모델로 결정! (12만원이지만.. 뭐 이정도야 쓸 수 있지.. 머..)
아니면.. 그냥 4GB도 상관은 없을 것 같긴 한데.. 어카지.. (LLM 같은 것도 돌려보고 싶다..)
그럼 이제 서브 컨트롤러를 정해야한다..!
서브컨트롤러 대체제
일단 CM 740 처럼 자이로 센서 다 있고하는 부품은 이제 안파는 것 같다..
그래서 일반 컨트롤러를 구입하고 자이로 센서를 추가하거나 하는 방식으로 해야할 것 같다..
일단 왜 그런진 모르겠지만.. 로보티즈에서 지금 파는 저렴한 서브 컨트롤러들은 두께가 좀 두껍고.. 사용하기에 애매하다..
일단 서브 컨트롤러의 내가 가지고 있는 CM 530을 사용할 순 있겠지만.. 라즈베리파이와의 연결이 어렵고 두께도 두껍고 버튼들이 옮길 수가 없다..
그래서 저건 제외하고 로보티즈에서 판매하는걸 본다면..
https://www.robotis.com/shop/item.php?it_id=902-0084-050
OpenCM 485 확장보드
OpenCM9.04 호환
www.robotis.com
https://www.robotis.com/shop/item.php?it_id=902-0084-040
OpenCM9.04-C
ARM Cortex M3, 초저가, 오픈소스, Arduino IDE
www.robotis.com
이렇게 2개를 같이 사용하는 것 밖에 방법이 없을 것 같다.
일단 너비는 상관없는데.. 높이가 가장 문제다.. PCB 확장판 위에 아두이노를 끼우는 것 같은거니.. 과연 저 안에 들어갈지가 가장 의문이다..
일단 간단하게 내가 찾은걸로 정리해본다면..
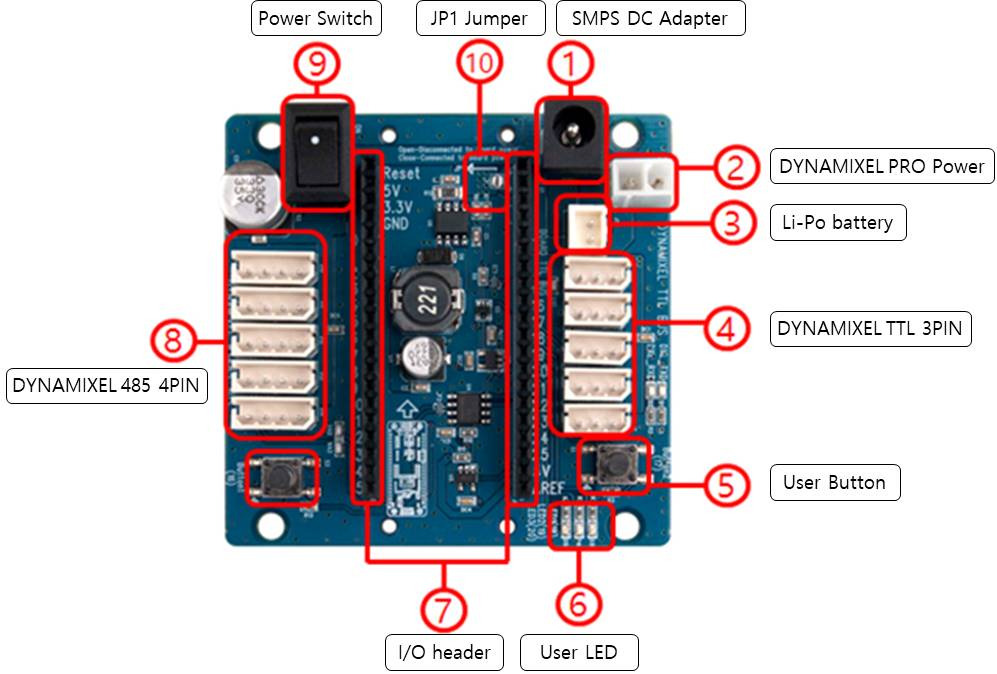
저 I/O header 위에 서브컨트롤러를 끼우는건데.. 그것 때문에 높이가 살짝 걱정된다.
그리고 일단 AX-12A를 바로 끼울 수 있는 3핀 커넥터 5개를 제공한다는 것이다! 그래서 머리, 왼쪽 팔, 오른쪽 팔, 왼쪽 다리, 오른쪽 다리 이렇게 5개 사용하면 될 것 같다.
그리고 아쉬운 점 들은.. USER LED 위치가 이미 고정됬다는 것, 유저 버튼도 고정된 것.. 파워 스위치, DC 어댑터도 고정됬다는 점이다..
LED나 버튼들은 뭐.. 어차피 따로 달면 되니깐 상관은 없겠는데.. 가장 큰 문제는 파워 어댑터랑 스위치이다..
난 저거를 Darwin OP와 똑같이 아래에다가 배치하고 싶은데.. 그게 안되니깐.. 어케 할지 고민인데.. 아마 지금 생각나는건 PCB를 만들어서 그걸 아래에 배치하고 저 확장보드의 전원은 항상 키고 확장보드의 Dynamixel PRO Power 커넥터에 만든 PCB와의 전원선을 연결해서 만든 PCB에서 스위치를 껐다 키면서 제어하는게 맞지 않을까 싶다..
뭐 그리고.. 아마 부족하진 않겠지만.. 추가로 커넥터가 필요하면 아래껄 쓰면 될 것 같다..
https://www.robotis.com/shop/item.php?it_id=903-0142-000
3P 확장 PCB
Molex 3P 확장용 보드
www.robotis.com
진짜.. 아직도 고민되는건 높이가 진짜로 충분할지.. 너무 고민이다.. 아마 가능은 할 것 같은데.. 진짜 괜찮을까.. 하는 걱정이.. 윽..
그리고 저기에 펌웨어를 업로드 해서 써야하는데 자이로센서나 이런건 어디에 달고 어디에서 쓸 수 있을지도.. 다 찾아야 할 것 같다..
일단 기본적으로 펌웨어하고 프로그램은.. 내가 다시 만들어야 하지 않을까 싶은데.. 흐아아아아아...
그리고 LED나 스피커, 마이크 등도 라즈베리파이에 달거나 하면 될텐데.. 과연 전부 잘 연결될지도 잘은 모르겠다..
자이로는 뭐 쓰지.. 또 추가할 센서는 뭘 쓰지.. 어케 연결해야하지.. 흐어어어어어...
뭐 암튼.. 나중에 한번 로보티즈에 뭘로 하는게 적합할지 문의 해봐야겠다..
아 참고로 U2D2도 찾아봤었는데.. 그거의 경우 그냥 펌웨어 업로드 하는게 아닌.. USB로 다이나믹셀 제품 전체를 제어하는건데.. 그거 같은 경우 실시간 처리가 어렵기 때문에.. U2D2는 못 쓸 것 같다.. 보통 로봇들은 MPU + MCU 구조로 하니깐.. 근데 어쨋든 MPU 만으로는 제어가 즉각적으로 되긴 힘들기 때문에 MPU + MCU 구조로 OpenCM9를 쓰는 것이 가장 적합할 것 같다..
아무튼 끝!
'로봇 > ROBOTIS DARWIN OP 2' 카테고리의 다른 글
| Darwin OP 2 제작 도전 [3. 컨트롤러와 나머지 결정 - 2] (2) | 2025.05.07 |
|---|---|
| Darwin OP 2 제작 도전 [3. AX 12A 가상 조립 - 모터 비교] (0) | 2025.04.30 |
| Darwin OP 2 제작 도전 [2. 가상 조립 - Cover] (0) | 2025.04.30 |
| Darwin OP 2 제작 도전 [2. 가상 조립 - Full Assembly] (0) | 2025.04.30 |
| Darwin OP 2 제작 도전 [2. 가상 조립 - Head] (0) | 2025.04.30 |