조금 특이한 점은 이전 포장은 조립식으로 박스를 조립해서 되어있었는데.. 이번엔 그냥 겹겹이 쌓아놓은 방식이다.
도데체 왜인거지..? 계속 내놓으면서 테스트를 했던건가..? 뭐가 더 나았던건지 같은.. 음..
이번 책 내용은 대충 이렇다!
이건 AR에 대해서 설명하고 있는 것 같은데.. 뭐 이건 오래된 기술이지만 뭔가 활용법도 나와있는데 신기하긴 하다..
근데 오른쪽 아래 Sony의 예전 아이보도 나오는데 이건 잘 모르겠지만.. 번역해보면 대충 이런 내용!
2011년 5월에 소니가 발표한 "SmartAR"는, 마커를 필요로 하지 않는 마커리스 방식으로, 물체의 그 자체를 인식하여, 명확한 실내 장면의 화상뿐만 아니라 어두운 장면의 물체나 인식이 쉬운 구조가 되어 있는 등 뛰어난 성능을 보여주고 있다. 또한, 카메라의 움직임이나 디지털 노이즈에 강한 특징을 가지고 있으며, 기존의 3D 공간 인식 기술을 결합하여 표시할 수 있다. 스마트폰의 화면에 터치한 경우의 동작 등도 지원하고 있다. 이러한 기술들은, 내부적으로도 개발되어 온 로봇 "AIBO(아이보)","QRIO(큐리오)" 등에서도 사용되는 "3D 물체 인식 기술","물체를 3D 공간으로 인식, 인식한 물체를 디지털 공간으로 이동시키는 기술","볼을 쫓아가는 기술" 등이 포함되어 있다.
뭔가 굉장히 나는 처음 보는 기술인 것 같다. 보통 AR은 캡쳐할 것의 무언가 숨겨둔 마커로 인식해서 뭔가 작동을 하는데.. 그게 전혀 필요없는 마커리스 방식.. 도데체 어떻게 2010년 대 인데 그런 기술이 나올 수 있었는지.. 나도 AI를 공부 중이지만.. 역시 어려울 것 같다.. 그 당시에는 학습도 굉장히 오래 걸렸을 것 같은데.. (CNN 같은걸 사용하는 건가..?)
이건 조립 설명서이다.
조립 설명서는 뭔가 많지만 되게 간단한 거였다. (뭐 부품도 별로 없으니 당연한건가..)
그냥 모터 테스트 보드 장착 후에 건전지 홀더를 이전에 조립했던 것에 달면 끝!
일단 이번 부품은 이게 끝인데 별로 없긴 하다.. 위에 말한 것 처럼 이게 도데체 왜 1,990엔..??
뭐 아무튼 다이소에서 샀던 건전지를 끼워주고.. 닫는다.
일단 테스트 보드를 장착하기 전에 테스트 보드를 보자!
테스트 보드의 앞면은 첫번째 사진이고 뒷면은 두번째 사진이다.
첫번째 사진의 왼쪽 커넥터는 모터의 케이블을 끼우는 커넥터, 오른쪽 커넥터는 아까 건전지 끼웠던 건전지 홀더 커넥터
앞면은 뭔가 단순한데 뒤쪽은 굉장히 복잡해보이는.. 이런 작은 보드에도 CPU 같은 칩이 있는 것 같은데.. 굉장히 신기하긴 하다.
아무튼 배터리 홀더를 아래쪽에 달아주고, 테스트 보드를 뒷면에 끼우고 모터 케이블과 건전지 홀더 케이블을 끼우면 완성!
일단 이건 실행하는 동영상이다! (실패한 동영상)
참고로 전원은 테스트 보드에서 킨게 아니라 건전지 홀더에서 킨거다. 처음에 설명서를 안읽고 해버리다 보니.. UP, DOWN을 눌르면 모터가 시계 방향이나 시계반대 방향으로 움직이겠지? 하고 눌렀는데 어라라?? 했었다. ㅋㅋㅋ
10년이나 지나서 모터가 고장났나 까지 생각했다.. 그러다가 한번 설명서를 보자하고 봤었는데.. 역시 내가 잘 못 눌른 것!
나는 모터를 테스트 하는 것인줄 알아서 모터 1개만 되는줄 알았는데 이건 로비의 모든 모터를 테스트 할 수 있는 보드였다.
UP, DOWN을 눌르면 모터 번호를 선택할 수 있는 것 같고 설명에는 제대로 나오지 않았지만 TEST/SET 버튼을 다른 번호에 두고 꾹 오래 눌르지 말라고 한다. 추측하자면 SET 이라는 것도 있는 것을 보아 꾹 눌르면 해당 번호로 모터 번호가 지정되는 방식인 것 같다. (아직은 잘 모르겠지만.. 현재는 그렇게 추측 중)
어쨋든 TEST 버튼을 눌르면 45도 -> -90도 -> 45도 이런식으로 움직인다고 한다. 아무튼 그게 이 영상!
굉장히 모터 하나만 움직이지만 신기하다!!
10년이나 지났는데도 이렇게나 모터가 멀쩡하게 잘 작동한다는 것이!!
지금 생각해보니 여기 들어가 있는 CPU 같은 칩은 사양이 별로 안좋을 테니 최소한의 코드만 들어갔을 것 같은데.. 그 중 모터를 움직이는 코드가 도데체 어떻게 들어갔을까가 굉장히 궁금해진다.. 서보 모터이니깐 모터의 위치를 찾고 그것에 대해서 어느 위치로 모터를 몇 씩 회전시켜야 할지 이런 것들.. 도데체 어떻게 되어있는걸까나.. 궁금해진다.
뭐 아무튼 서보모터 이기 때문에 해봐야 할 테스트에 대한 영상이다!
전원을 끈 상태로 모터의 회전을 바꾸고 전원을 키고 실행하면 어떻게 될까에 대한 영상!
역시 서보모터인지 자기 위치를 알고 돌아가서 움직인다! (뭐 위치를 모르는 것도 있지만..)
뭔가 이거를 보다보니 도데체 서보모터가 자기 현재 회전 값을 알고 있는지 궁금해진다..
이 글을 쓰고 찾아보러 가야겠다!!
아 그리고 마지막으로 위에 올렸던 사진 중에 이거!
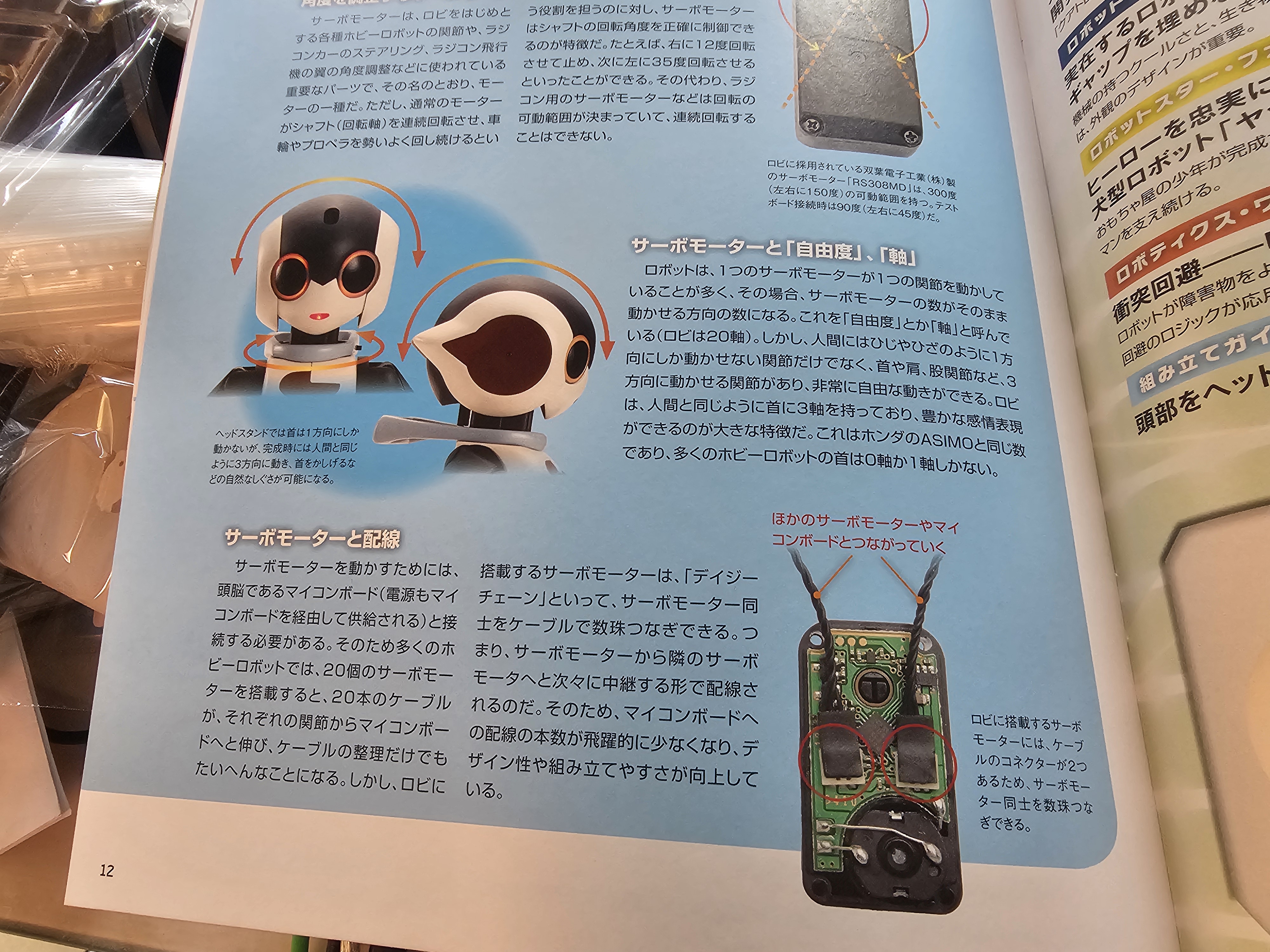
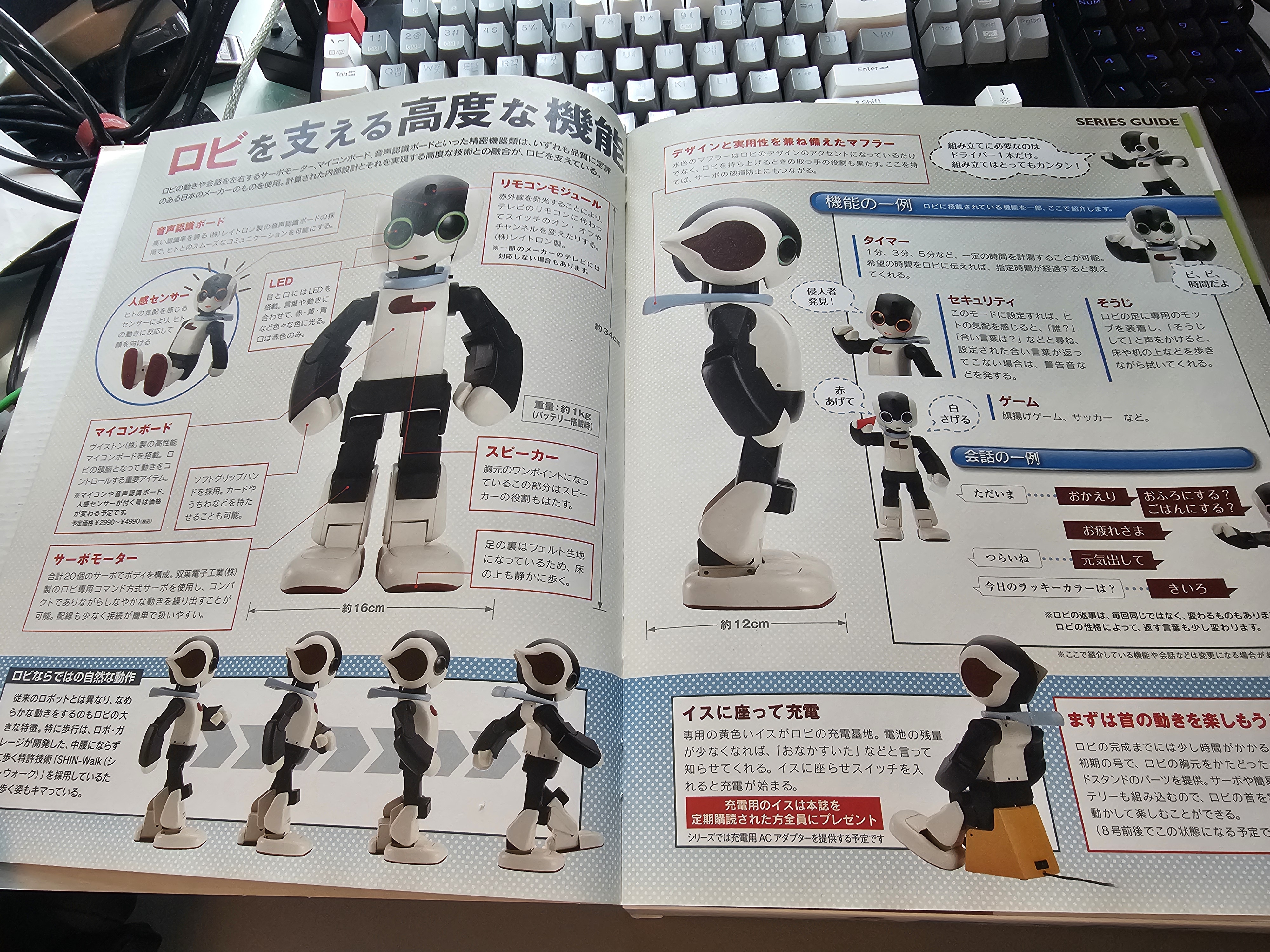
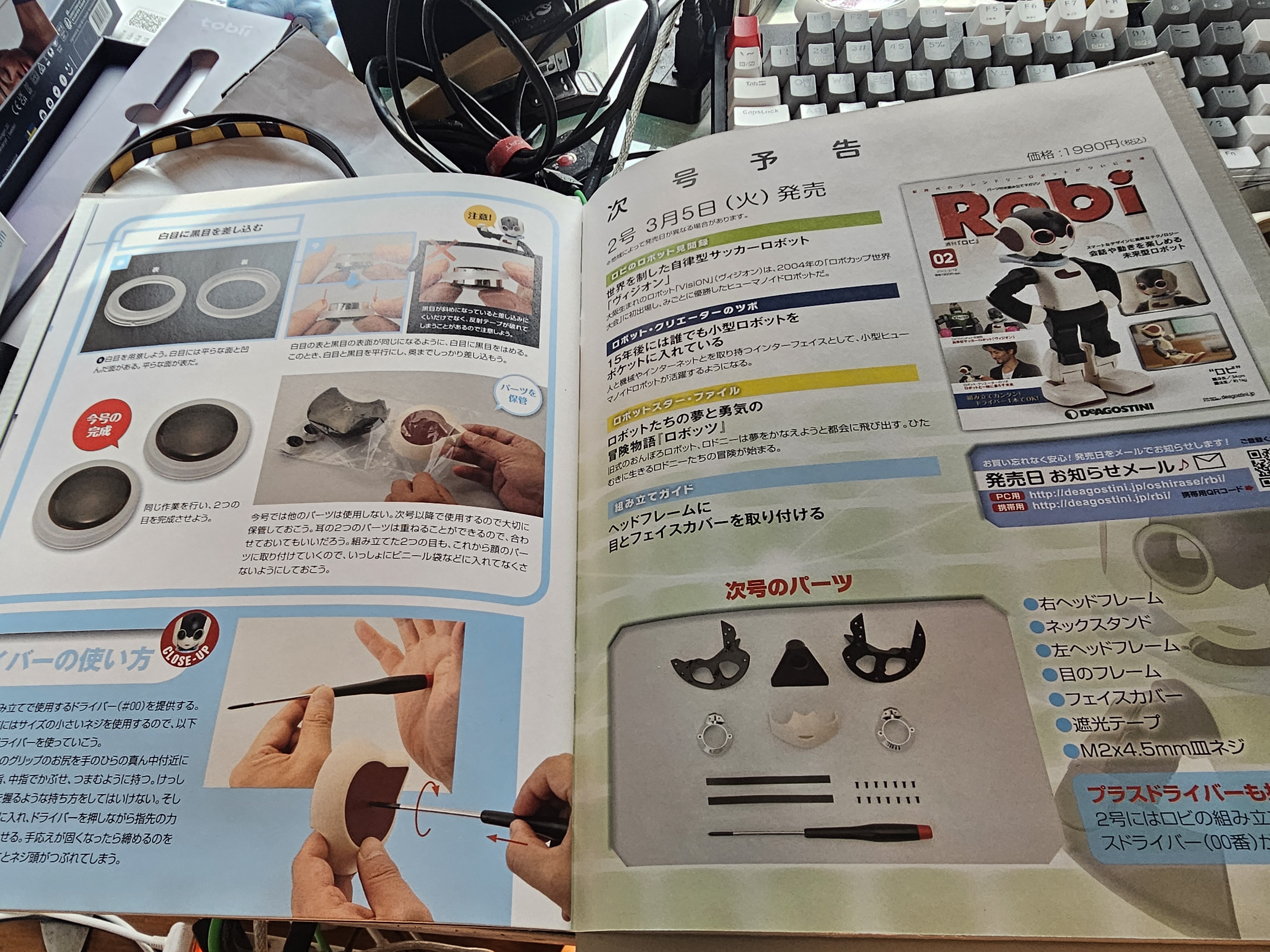
로비의 목 회전은 사람의 목 회전과 같은 총 3축으로 되어있다고 나와있다!
그리고 로비나 사람이나 관절이 여러개이라면서 혼다의 아시모 로봇도 여러개 관절이 있다면서 나와있는데, 아시모를 보다보니 비슷한 생김새의 오준호 박사님이 개발하셨던 휴보 라는 로봇도 생각이 났다. (박물관에서 봤었던 것 같은데.. 몇년 전에 봤던거지;;)
암튼 도데체 저 작은 것 안에 모터가 어떻게 3개가 들어갈지는 모르겠지만.. (모터에 모터에 모터 이런식으로 붙을려나?)
뭔가 앞으로의 조립이 굉장히 기대된다!!
아무튼 최종적으로 6권까지 조립된 테스트 로봇! 신기하다!!
(근데 눈알을 보니 갑자기 든 생각이 지난번에 발표된 논문이 생각이 났다.. 사람의 눈알 사진을 보고 3D로 어떤거 보는지 형상을 만드는 인공지능에 대한 거..)
조금 아쉽긴 하다.. 10년이나 지난거라서 인지 색이 변하기 시작했다.. 일단 저 제질은 자외선 빛을 받으면 색이 쉽게 변하는 것은 알기 때문에 케이스를 샀는데.. 이것 부터가 이렇게 된거라면.. 조금 문제가 있긴 하다.. 일단 이건 로봇에 직접 들어가는 부품은 아니기 때문에 뭐 다행이긴 하다만.. 이후에 개봉할 부품도 이런식으로 되어있다면.. 뭔가 굉장히 기분이 않좋을 것 같다..
아무튼 이건 모터 테스트 모형을 조립하는 부분이다!
이번에는 가끔 구글에서 보는 예쁜 로봇이 설명되어있고 조립 쪽이 있다.
근데 세번째 사진에 보면 무슨 조립 동영상이 있다고 되어있는데.. 로비에 대한 블로그 0번째 부분에서 말한 것 처럼 2024년 5월 31일 이후로 로비에 대한건 모두 사라졌다..
그렇다 보니 저 동영상 링크도 이제는 접근할 수가 없다.. 뭐 아카이브 사이트에서 찾을 수는 있을 것 같지만 귀찮으니 뭐 상관은 없다.
분명히 다 찍은줄 알았는데.. 몇몇 사진이 없긴 한게 좀 이상하긴 하다..
뭐 아무튼 이번에는 모터 테스트 부분의 모형을 전부 조립하는 것인데 솔직히 이게 제일 어려운 것 같았다.
왜냐하면 팔쪽 2개와 위쪽 파란 부분과 모터를 동시에 조립해야한다.
찍는데도 어려웠고 나 혼자 하다보니 여기가 시간이 좀 걸렸다.
뭐 아무튼 세번째 사진 처럼 모터 케이블을 빼주고 해서 완성했다.
아쉬운건.. 플라스틱 색이 변한 것.. 뭐 어쩔 수 없는건가..
나중에 가능하면 도색도 생각해봐야 할지도 모르겠다..
아무튼 이걸로 이부분 까지 조립했다.
나사는 긴거 1개와 짧은거 2개가 남았다. 진짜 여유분을 별로 안주긴 하다.. 작기도 해서 잘못하면 잃어버릴지도..
또 단점은 오래된 것인지 때문에 나사가 끝까지 끼우면 헛도는게 있다는게.. 좀 많이 아쉽다..
여기에선 뭔가 이상한 쪽지도 끼워져 있었다. 뭔 말인지는 모르겠다. 뭐 번역 해보실 분은 해보시길..
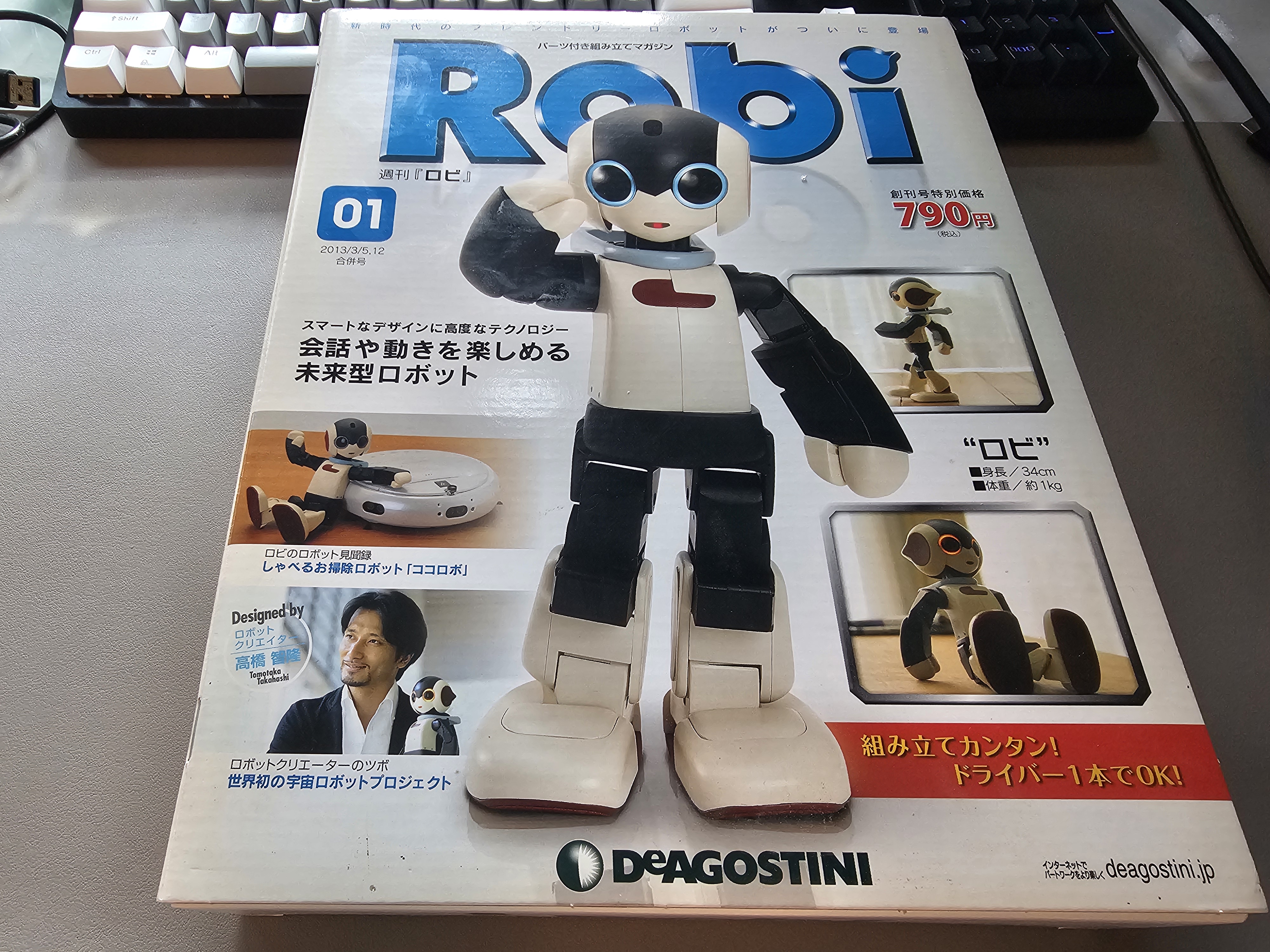
이번은 부품이 적게 있다. 하지만 제일 중요한 부품인 모터가 있다! (10년이나 지났으니 잘 작동할지는 모르지만..)
그리고 이번 것은 1권과 비슷하게 플라스틱이 겹쳐져 있다.. 그래서 뒤에를 뜻어야 하는..
암튼 부품에는 테스트 모터와 머리 위쪽 뚜껑 부분과 귀쪽 부분이 있다.
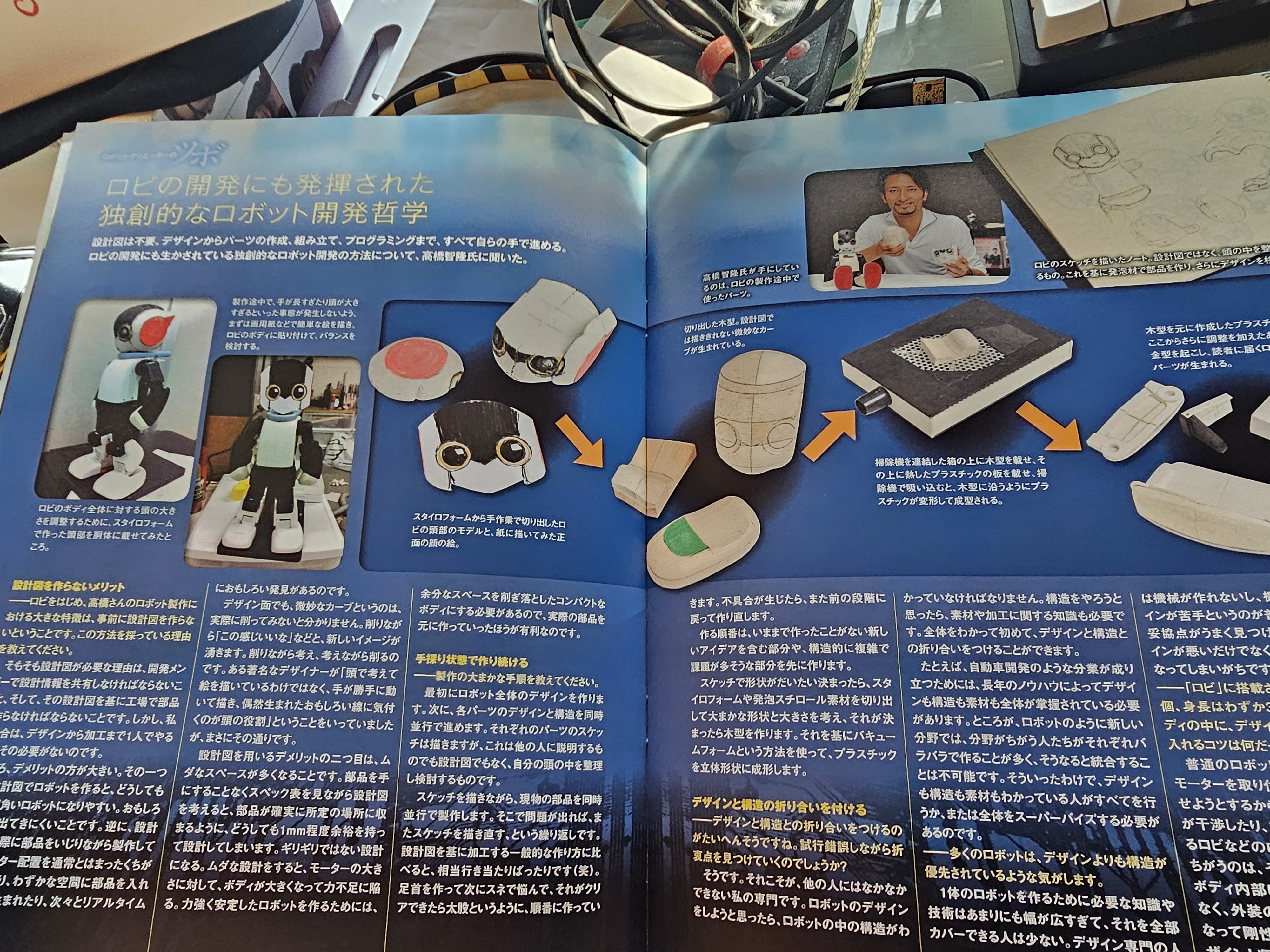
책에는 대충 이런 내용이 있는데 뭔 자동차하고 로비가 디자인이 어케 된건지 같은 내용이 있다. 첫번째 사진은 뭔지는 모르겠지만 책과 표지를 분리할 수 있는데 표지의 안쪽 부분이다.
아무튼 이번 부품은 이정도!
위에 말했던 대로다!
그리고 이쪽이 카메라 부분인줄 알았지만 마이크인가 송수신인가 하는 부분
이번에는 부품이 별로 없는데 조립할게 많은 파트이다.
대충 이전에 조립했던 부품인 눈과 옆쪽 조립했던 부품에서 위쪽 뚜껑과 결합하고 뒷쪽 뚜껑을 조립하는 것이다.
첫번째에 두번째에 있는 사진 처럼 끼우는 것인데 파란색 가상선으로 표시가 되어있다.
세번째와 네번째 사진은 그냥 양옆이 다르다는 것을 표시
아무튼 그것대로 맞춰서 나사를 조립해주면 된다! 사실 그냥 맞춰서 조립하면 되는거다. 어렵지는 않지만.. 쉽지도 않은.. 한번에 맞춰서 끼워야 하다 보니..계속 움직이는..
그리고 뒤쪽 머리 부분도 똑같이 끼워주면 마지막 사진 처럼 완성!
그리고 이번엔 귀쪽 부분이다.
이전에 열은 부품과 이번에 열은 부품을 조립하는건데 그냥 잘 안보이는 부분까지 깔끔하게 보이게 하는 조립이다. 그냥 나사 1개를 저기에다가 끼워서 조립하면 끝난다.
다음은 모터 부분이다.
여기에서는 모터를 분해해서 뒤쪽의 파츠를 바꾸는 조립인데.. 처음 부터 이렇게 되어있지 않고 직접 조립하는 것을 보니.. 이렇게 파트를 바꿀 수 있다는 것을 보여줄려는건지 아니면 이미 조립 되어있는 부품이니 직접 바꾸라고 한건지는 잘 모르겠다만.. 신기하긴 하다. 왜냐하면 내가 지금까지 로봇을 조립해봤을 때 모터를 분해해서 다른 걸로 교체해본적은 처음이니.. 내부가 어떤지도 잘 본적이 없었다.
아무튼 모터 앞쪽의 나사를 풀어서 뒤쪽 파츠를 뜯고 4권에서 조립했던 선을 위에서 아래로 꾹 눌러서 끼우고 교체할 부품을 대신 끼워서 선을 바깥으로 뺴서 끼우고 조립해주면 모터 부분 조립은 끝난다.
책에서도 나온 내용인데 저렇게 모터에 2개의 케이블 끼우는 곳이 있는 이유는 선 정리나 선의 갯수를 줄이는데 도움이 되도록 하는 것이다. 저렇게 하면 모터 번호만 메인보드가 각각 기억하면 연결된 여러개 이어져있는 모터에서 찾아서 모터를 돌리고 하면 잘 되니.. (참고로 로보티즈 모터들도 저렇게 되어있다.)
이번 책 내용은 대충 이렇게 되어있는데 자전거 타는 로봇 설명하고 얼굴인식에 대한 설명 같은데
내가 알기로는 저런 얼굴인식 방식을 사용하는 라이브러리가 OpenCV인걸로 알고 있다.
대충 웹에 돌아다니는 OpenCV 사진인데 이것과 비슷한 사진이 저기에도 있는 것을 보아.. OpenCV에서도 저 방식을 사용한 것 같은데..
일단 이번 조립 설명서는 이거다! 간단하게 팔쪽을 조립해주고 전선 쪽에 앞뒤와 뭐 부착할 수 있는걸 쉽게 할 수 있도록 뭔 스티커를 끼우는 것 같다.
부품은 이렇게 이후에 테스트를 할 수 있는 테스트 보드, 모터 선, 테스트 보드를 끼우는 모형 부품이다.
일단.. 내가 팔 부분 조립하는걸 도데체 사진을 어디에 뒀는지 안찍은건지.. 없다.. 그래서 일단은 이 부품 사진만 올리는데 그냥 간단하게 앞뒤 구분해서 스티커를 두번째 사진 처럼 부착해주는 것이 끝이다. 팔 부분은 그냥 나사로 2 부품 조립하면 끝난다. 여유 나사는 1개..
책 내용은 뭔가 휴머노이드 로봇 다른거 설명하는거하고 로비 기능에 대해서 설명하고 있다. 근데 여기에서 한가지 내가 몰랐던건.. 로비 머리 위쪽에 있는 구멍 뚫린 부분이 카메라인줄 알았는데 마이크 이런 것 같다. 로비 2가 저게 카메라 인것 같긴 하던데.. 뭐 아무튼..
그리고 이번에는 조립 방법이 좀 긴데.. 뭐 이정도는 간단!
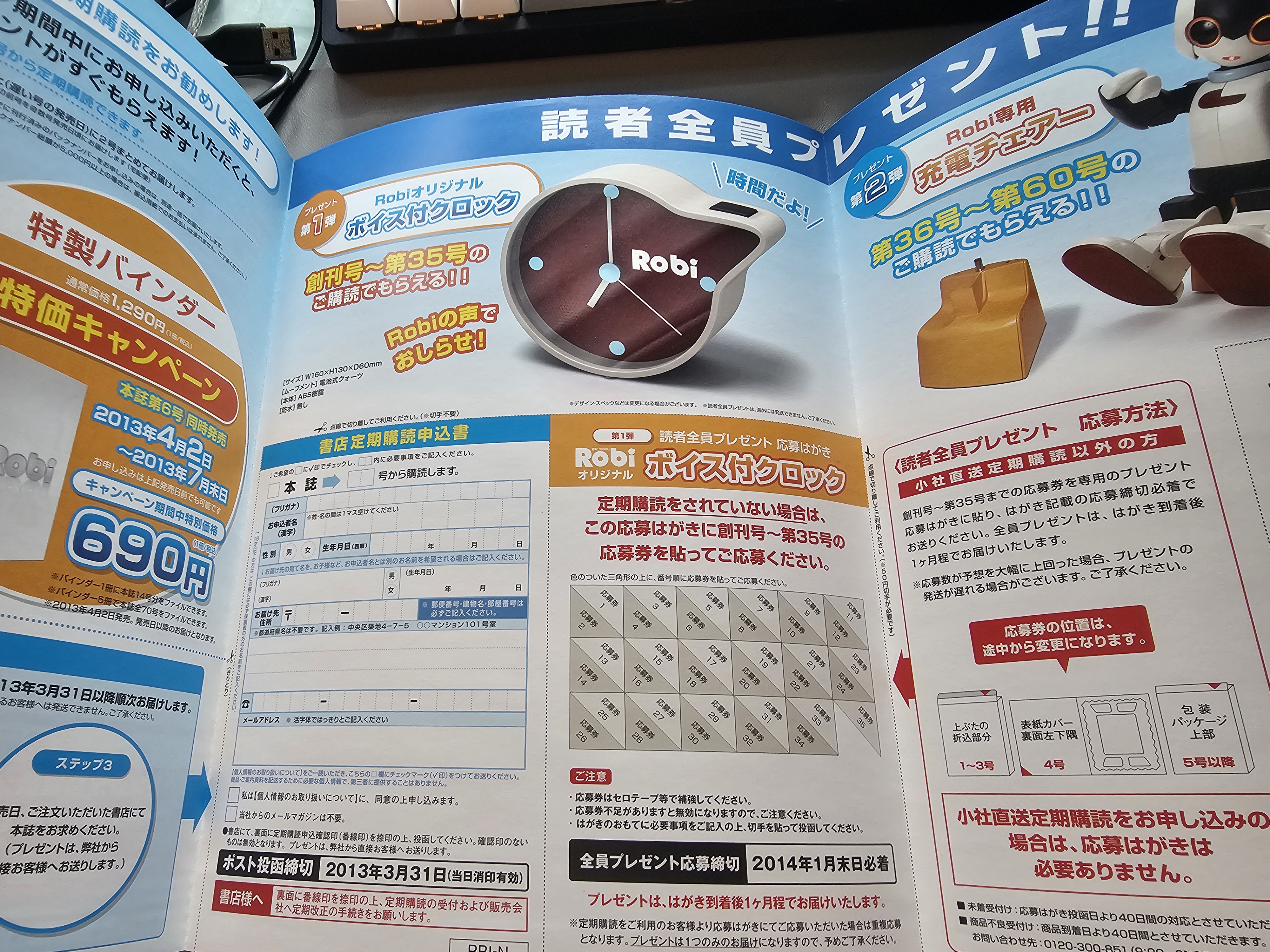
그리고 이게 세모난 무언가인데 1권에서 말했던 것 처럼 이거를 뜯어서 응모를 해서 시계를 얻을 수 있는 그런 것 같다. 근데 왜 이게 뜯겨있지도 않은데 판매자가 보낸 것에 왜 로비 시계가 있는건지는.. 모르겠는..
이번 2권에서는 이런식으로 플라스틱 위쪽 뚜껑을 뗴는 방식인데 1권과 전혀 다르다.. 왜 그렇게 다르게 한건지는 모르겠다.. 비용 때문인건지 부품 때문인건지..
일단 전체 부품은 이렇다. 머리 쪽 부품인데 여기에서 부터 나사나 이런게 있다.
일단 첫번째 이것의 차이점이 나와있는데 한쪽은 짧고 한쪽은 긴 것으로 양쪽을 구분한다고 적혀있다.
이게 저것으로 중앙 부분 것과 조립을 해야하는데.. 이게 제일 이 파트에서 어려웠다.
왜냐하면 중간 부분이 진짜 빡빡할 정도로 붙어있다. 그렇다 보니 끼울 때 한쪽을 먼저 끼우고 나머지를 끼우니깐 전혀 들어가지를 않는다.
그래서 내가 로봇 조립할 때 마다 하는게 모두 조이지 않고 일단 다 끼우고 꽉 조이는데 이것도 그렇게 했더니.. 겨우 되는.. 일단 되긴 했지만.. 이 파트가 제일 어려운 것 같다.. 그리고 또 한가지는 이 부품이 10년 정도 지난 것 때문인지 나사를 조이면 헛돈다..
이 사진을 보면 나사를 조이는 너트가 있는게 아니고 부품에다가 바로 박아버리는 방식인데 이게 오래 되서 인지 제대로 끼울려고 해도 헛돌아서 뭔가 제대로 끼워지는 느낌은 없다.. 뭐 풀리지도 않을 테니 다시 끼우지도 못하고.. 아무튼 이것 때문에 살살 조이긴 해야할 것 같다. 너무 강하게 조이면 진짜로 부숴질지도..
이번에는 눈알 부분 조립하는건데, 첫번째 사진 처럼 1권에서 만들었던걸 플라스틱에 끼운다. 참고로 나는 뭔가 대칭으로 하고 싶어서 기준 점을 잡기 위해 안쪽으로 튀어나온 저걸 기준으로 끼웠다.
그리고 두번째 사진에 저거를 첫번째꺼와 연결해야하는데 안쪽으로 튀어나온 그걸로 맞춰서 끼우는 거였다. 끼운 사진이 세번째 사진
그리고 4번째 사진에 있는 것을 5번째 처럼 주변에다가 둘러준다. 책을 자세히 안봐서 이게 뭔지는 잘 모르겠다면 추측하기로는 불투명 부분으로 라이트가 나갈 때 다른 곳으로 라이트가 빠져나가지 않고 불투명 한 부분으로만 라이트가 나가도록 하기 위해 검은색으로 막는 것 같다. 다행히 저건 10년이 지나도 접착은 조금 샌 것 같다. 그래도 약하긴 하지만.. 뭐 아무튼 저것도 튀어나온 그쪽을 시작으로 감았다.
그걸로 2개를 완성한게 6번째 사진
이제 이거를 처음에 조립했던 것에 연결하는건데 이것도 어렵지는 않다. 나사를 이용해서 눈쪽에 있는 구멍과 결합하는 것, 아무튼 대칭 처럼 맞출려고 했던 것이 여기에서 도움이 되었는데 양 옆에 딱 맞춰서 끼우는 것 때문에 잘 안 붙던 검은 테이프도 잘 고정되게 되었다. 참고로 저렇게 테이브를 부착하라는 말은 없었다.
그렇게 2권까지 완성한건 이런 모습
나사는 너무 조금 밖에 안준다. 이게 다 쓰고 남은 2개의 나사.. 1권 부터 생각했지만 여유분을 별로 안주고 딱 필요한 큼만 주는 것이 뭔가 좀 별로기는 하다..
근데 내가 헷갈리는건 리턴 값에서 시를 3600초를 곱하고 분을 60을 곱하고 초를 더하면 모두 초로 바꿀 수가 있는데.. 도데체 왜 각 시간마다 * 10 + int()가 있는지를 모르겠다.. (참고로 괄호 안에는 문자열을 슬라이스 해서 숫자 부분만 넣는 그런 코드를 넣어야 한다)
아무리 생각해도 * 10 + int()가 필요 없을텐데도 있었고.. 심지어 빈칸 채우기여서 지울 수도 없었다.. 그래서 이것 때문에 5분 정도 생각해도 코드를 수정할 수도 없으니 디버깅도 불가능하기에 계속 생각을 했었다.. 결국에는 리턴 값으로 출력하는 부분을 수정할 수 있어서 그걸로 값을 넣어보면서 직접 보기도 했었는데.. 시간이 1분 밖에 안남았을 때.. 그냥 서둘러서 하자는 생각으로 어차피 시작에서 끝 초를 출력하는게 아닌 인덱스를 출력하는거니깐 int(s[0:2]) * 10 + int(0) 이런식으로 채워넣었다. 결국에 이렇게 하면 시간이 22시 10분 03초 인 경우 hour에는 220, 분은 100, 초는 30이 되어버리는데 뭐 이렇다 해도 인덱스 구하는데는 문제가 없으니.. 저대로 하고 그냥 포기하고 냈다. (18초를 남기고 제출..)
그리고 30초 정도 채점하고 결과가 나왔는데.. 어라?
왜 만점이지??
이렇게 된다면.. 진짜로 그 뒤에 * 10 + int()는 그냥 헷갈리게 할려는 문제인 것 같았다..
뭐 암튼 이렇게 해서 자격증을 땄다.
이걸 딴 이후에는 집에 바로 가기 좀 그래서 고등학교에 놀러 가서 고3 애들과 리듬게임 하다가 선생님과 뭔가에 대해서 이야기를 하고.. 한 선생님이 버스 정류장 까지 태워다 주신다길래.. 타고 가다가 가는 길의 대형 마트에서 맛있는 빵을 판다고 해서 갔었다. 간 후에는 고르라고 하시는데.. 뭔가 굉장히 미안한 느낌 때문에 고르지 못하고 있으니.. 선생님이 대신 골라주셨다. 결제해보니.. 대충 2~3만원.. 음..
일단 1권 부터 4권은 판매자가 씰만 개봉했다고 판매 페이지에도 나와있었다. 그렇기 때문에 씰이 이미 개봉 되어있는 상태인데.. 10년이 지나도 보관이 잘 되어있으니 좋다!
앞면과 뒷면은 이런 상태로 되어있는데 이전 글에서도 말했지만 한가지 특이한 점이 있다.
직구 규제는 어린이 제품이나 직류 제품, 배터리 정도만 해당되는데 이 제품은 놀랍게도 어린이 제품이 아니라고 되어있다.
뒷면에 이런식으로 글씨가 써있는데
이건 この商品は14歳以上を対象に設計しております。玩具ではありません。이렇게 써져있다.
번역하면 "이 상품은 14세 이상을 대상으로 설계되었습니다. 장난감이 아닙니다." 이런데 장난감이 아니라고 까지 적어놓아서 신기하면서도 다행이였다.
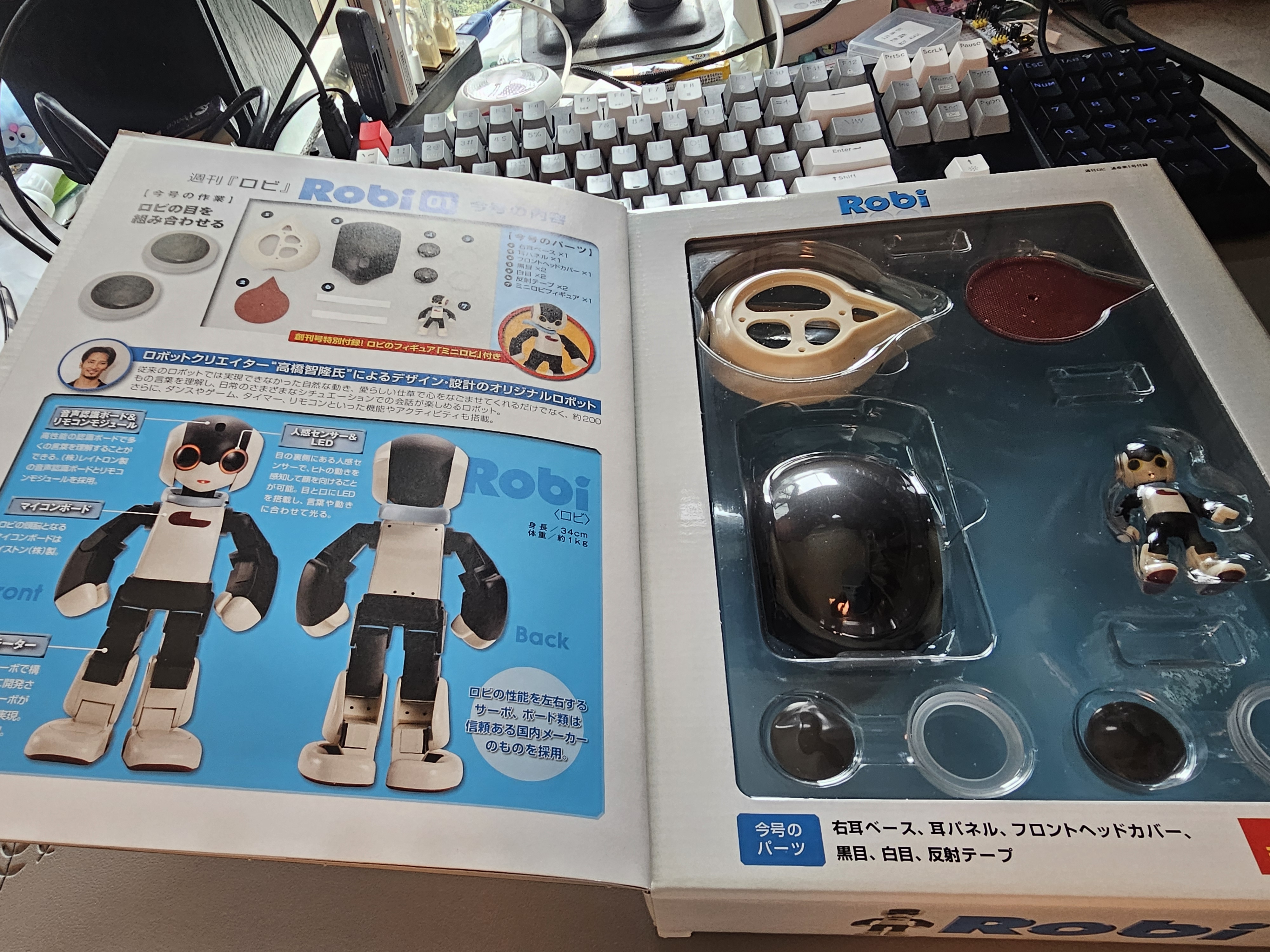
아무튼 열어보면?
이런식으로 되어있는데 1~4권 까지는 이런식으로 플라스틱 케이스에 잘 보관되어있고 앞쪽에는 책으로 되어있다.
구성은 왠지 아직까지도 잘은 모르겠지만 이후에 쓰는 구성품이 3개이고 여기에서 조립할 구성품은 눈쪽 부품인 4개 밖에 없다..
아직도 왜 이후에 쓰는걸 넣어 놓은건지는 모르겠지만 추측하기로는 가격 때문인 것 같기도 하고 뭔가 희망? 같은거를 채울려고 하는 것 같기도 하고.. 잘은 모르겠지만 저런 것 때문에 부품을 보관해야하는데 조금 귀찮다..
책 내용은 대충 이렇게 되어있는데, 추가로 더 있긴 하다. 앞쪽에는 찍어놓지는 않았지만 당시의 인공지능이나 로봇에 대한 뉴스나 소식들을 적어놓았다. 아니면 로봇에 대한 작동 원리 이런 것들까지도.. 내가 이 로봇을 산 이유도 로봇에 대한 이론이나 그런 것을 공부할려고 산건데 너무 좋다!
그리고 부품을 꺼내면 이런식으로 또 책이 나오는데 이거는 로비 시계다. 각 책 마다 세모난 뭔가가 있는데 그걸 전부 모아서 보내면 로비 시계를 보내주는 것 같다. 한가지 이상한게.. 상품을 받은 것 중에 로비 시계도 포함 되어있었는데, 저 판매자는 저거를 보냈었다면 세모난 뭔가가 없어져 있거나 저런 책자가 없을 텐데 전부 포함되어있다.. (도데체 어떻게 얻어서 보낸거지..)
아무튼 부품 쪽만 보면 이렇게 되어있다. 그런데 이상한건 위 아래로 플라스틱이 덮여있는데 이게 방식이 전부 다르다. 왜인지는 잘 모르겠지만 사람들의 피드백을 듣고 실시간으로 바꾼거거나 아니면 제품 보호를 위해 그랬던지..
이런식으로 열리는 구조로 되어있다. 손으로 들어올리고 있는 부분 위에 부품이 있는걸로 되어있고 손으로 잡고 있는 부분이 아닌거 아래에는 종이가 붙어 있었다. (종이가 떨어지지 않고 붙어 있었으므로 이 제품은 미개봉 제품인건 틀림 없다.)
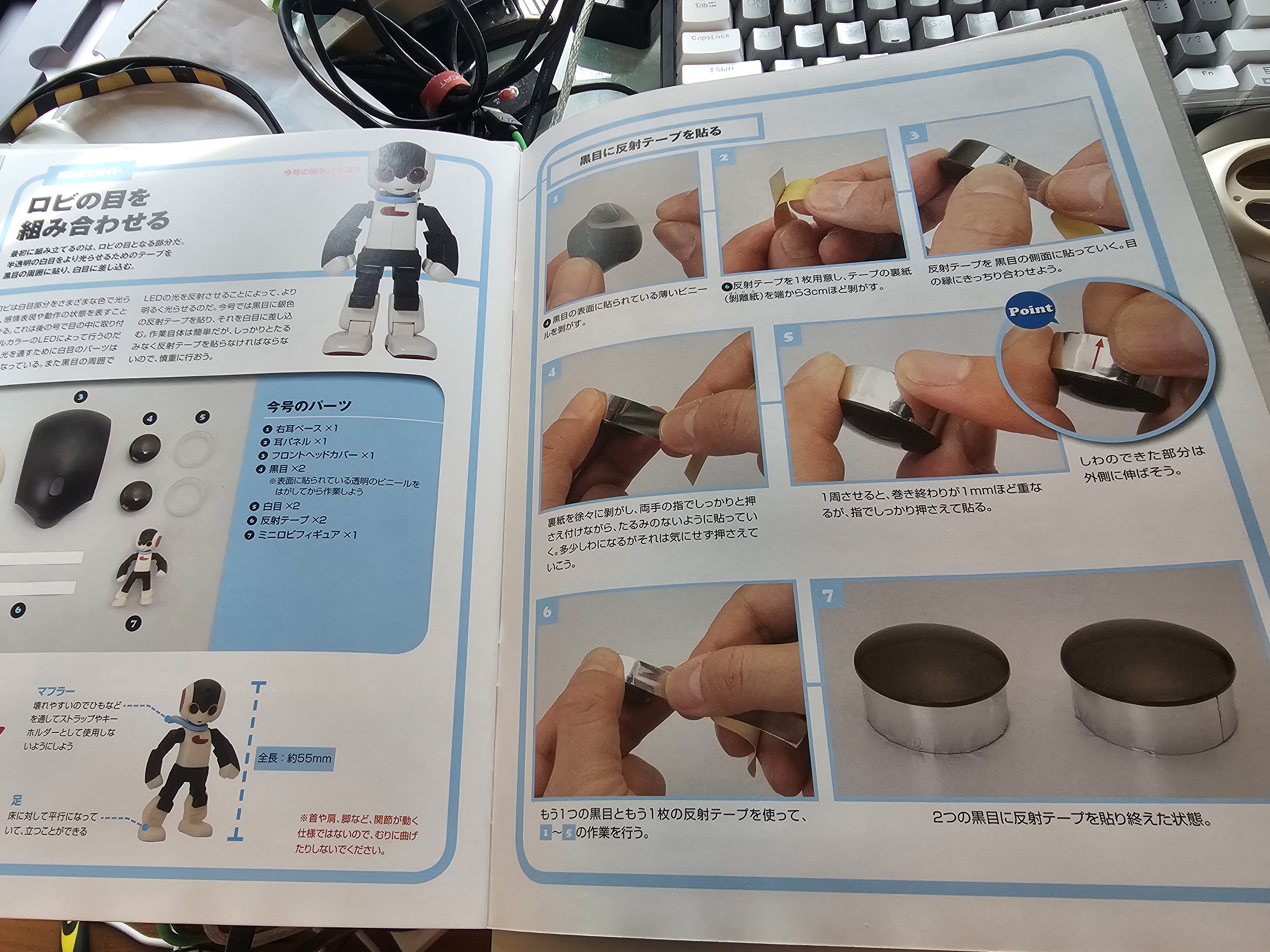
아무튼 꺼낸 부품에서 조립해야할 부분은 눈 쪽인데 검은 눈동자와 흰 눈동자와 반사 스티커이다. 참고로 반사 스티커는 흰색 귀 파츠 아래에 있다.
이제 조립을 하는데 일단 검은 눈동자는 저렇게 생겼다. 위에 2개 긴건 반사 스티커이다.
이런식으로 반사 스티커를 붙여야 하는데.. 책에는 붙이는 팁도 적혀있다. 근데 한가지 아쉬운건 10년이나 지났는지 접착이 잘 안된다.. 그리고 접착이 잘 안되다 보니 붙일 때 정교하게 하기가 어렵다.. 그렇다 보니 좀 지저분하게 붙쳐졌다.
책에도 저 부분이 뭐를 하는건지 나와있는데 로비 로봇의 눈에서는 감정이나 이런걸 색으로 표현한다. 그런데 이걸 표현하기 위해 led를 사용하는데 저 반사 스티커가 아마 없다면 부분부분 어디만 들어온다던지 빛의 밝기도 어두울 텐데 저 반사 스티커를 붙이면 빛의 밝기가 올라가고 골고루 빛이 들어오는 걸로 알고 있다.
그 후에는 흰 눈동자 부분인 LED 빛이 보이는 부분을 눈동자에 끼워준다. 그냥 반대로 뒤집고 위에서 아래로 양손으로 눌르며 끼워주면 잘 끼워진다. 순간 끼우다가 툭 소리가 나길래 부숴진줄.. 휴우..
1권은 이렇게 조립이 끝이다. 진짜 별거 없긴 하다.. 그래도 스티커 붙이는데 좀 걸리긴 했다.. 잘 안 붙어서.. 심지어 난 다한증이 있어서 잘 안 붙기도 하다..