 |
 |
이번엔 6권!

이번엔 이것과 고정할 나사, 케이블이 끝!
어째서.. 별로 안되는데.. 1,990엔 인거지..??
뭐 어쨋든..
 |
 |
조금 특이한 점은 이전 포장은 조립식으로 박스를 조립해서 되어있었는데.. 이번엔 그냥 겹겹이 쌓아놓은 방식이다.
도데체 왜인거지..? 계속 내놓으면서 테스트를 했던건가..? 뭐가 더 나았던건지 같은.. 음..
이번 책 내용은 대충 이렇다!

이건 AR에 대해서 설명하고 있는 것 같은데.. 뭐 이건 오래된 기술이지만 뭔가 활용법도 나와있는데 신기하긴 하다..
근데 오른쪽 아래 Sony의 예전 아이보도 나오는데 이건 잘 모르겠지만.. 번역해보면 대충 이런 내용!
2011년 5월에 소니가 발표한 "SmartAR"는, 마커를 필요로 하지 않는 마커리스 방식으로, 물체의 그 자체를 인식하여, 명확한 실내 장면의 화상뿐만 아니라 어두운 장면의 물체나 인식이 쉬운 구조가 되어 있는 등 뛰어난 성능을 보여주고 있다. 또한, 카메라의 움직임이나 디지털 노이즈에 강한 특징을 가지고 있으며, 기존의 3D 공간 인식 기술을 결합하여 표시할 수 있다. 스마트폰의 화면에 터치한 경우의 동작 등도 지원하고 있다. 이러한 기술들은, 내부적으로도 개발되어 온 로봇 "AIBO(아이보)", "QRIO(큐리오)" 등에서도 사용되는 "3D 물체 인식 기술", "물체를 3D 공간으로 인식, 인식한 물체를 디지털 공간으로 이동시키는 기술", "볼을 쫓아가는 기술" 등이 포함되어 있다.
뭔가 굉장히 나는 처음 보는 기술인 것 같다. 보통 AR은 캡쳐할 것의 무언가 숨겨둔 마커로 인식해서 뭔가 작동을 하는데.. 그게 전혀 필요없는 마커리스 방식.. 도데체 어떻게 2010년 대 인데 그런 기술이 나올 수 있었는지.. 나도 AI를 공부 중이지만.. 역시 어려울 것 같다.. 그 당시에는 학습도 굉장히 오래 걸렸을 것 같은데.. (CNN 같은걸 사용하는 건가..?)
 |
 |
 |
이건 조립 설명서이다.
조립 설명서는 뭔가 많지만 되게 간단한 거였다. (뭐 부품도 별로 없으니 당연한건가..)
그냥 모터 테스트 보드 장착 후에 건전지 홀더를 이전에 조립했던 것에 달면 끝!
 |
 |
일단 이번 부품은 이게 끝인데 별로 없긴 하다.. 위에 말한 것 처럼 이게 도데체 왜 1,990엔..??
뭐 아무튼 다이소에서 샀던 건전지를 끼워주고.. 닫는다.
일단 테스트 보드를 장착하기 전에 테스트 보드를 보자!
 |
 |
테스트 보드의 앞면은 첫번째 사진이고 뒷면은 두번째 사진이다.
첫번째 사진의 왼쪽 커넥터는 모터의 케이블을 끼우는 커넥터, 오른쪽 커넥터는 아까 건전지 끼웠던 건전지 홀더 커넥터
앞면은 뭔가 단순한데 뒤쪽은 굉장히 복잡해보이는.. 이런 작은 보드에도 CPU 같은 칩이 있는 것 같은데.. 굉장히 신기하긴 하다.
 |
 |
아무튼 배터리 홀더를 아래쪽에 달아주고, 테스트 보드를 뒷면에 끼우고 모터 케이블과 건전지 홀더 케이블을 끼우면 완성!
일단 이건 실행하는 동영상이다! (실패한 동영상)
참고로 전원은 테스트 보드에서 킨게 아니라 건전지 홀더에서 킨거다. 처음에 설명서를 안읽고 해버리다 보니.. UP, DOWN을 눌르면 모터가 시계 방향이나 시계반대 방향으로 움직이겠지? 하고 눌렀는데 어라라?? 했었다. ㅋㅋㅋ
10년이나 지나서 모터가 고장났나 까지 생각했다.. 그러다가 한번 설명서를 보자하고 봤었는데.. 역시 내가 잘 못 눌른 것!
나는 모터를 테스트 하는 것인줄 알아서 모터 1개만 되는줄 알았는데 이건 로비의 모든 모터를 테스트 할 수 있는 보드였다.
UP, DOWN을 눌르면 모터 번호를 선택할 수 있는 것 같고 설명에는 제대로 나오지 않았지만 TEST/SET 버튼을 다른 번호에 두고 꾹 오래 눌르지 말라고 한다. 추측하자면 SET 이라는 것도 있는 것을 보아 꾹 눌르면 해당 번호로 모터 번호가 지정되는 방식인 것 같다. (아직은 잘 모르겠지만.. 현재는 그렇게 추측 중)
어쨋든 TEST 버튼을 눌르면 45도 -> -90도 -> 45도 이런식으로 움직인다고 한다. 아무튼 그게 이 영상!
굉장히 모터 하나만 움직이지만 신기하다!!
10년이나 지났는데도 이렇게나 모터가 멀쩡하게 잘 작동한다는 것이!!
지금 생각해보니 여기 들어가 있는 CPU 같은 칩은 사양이 별로 안좋을 테니 최소한의 코드만 들어갔을 것 같은데.. 그 중 모터를 움직이는 코드가 도데체 어떻게 들어갔을까가 굉장히 궁금해진다.. 서보 모터이니깐 모터의 위치를 찾고 그것에 대해서 어느 위치로 모터를 몇 씩 회전시켜야 할지 이런 것들.. 도데체 어떻게 되어있는걸까나.. 궁금해진다.
뭐 아무튼 서보모터 이기 때문에 해봐야 할 테스트에 대한 영상이다!
전원을 끈 상태로 모터의 회전을 바꾸고 전원을 키고 실행하면 어떻게 될까에 대한 영상!
역시 서보모터인지 자기 위치를 알고 돌아가서 움직인다! (뭐 위치를 모르는 것도 있지만..)
뭔가 이거를 보다보니 도데체 서보모터가 자기 현재 회전 값을 알고 있는지 궁금해진다..
이 글을 쓰고 찾아보러 가야겠다!!
아 그리고 마지막으로 위에 올렸던 사진 중에 이거!
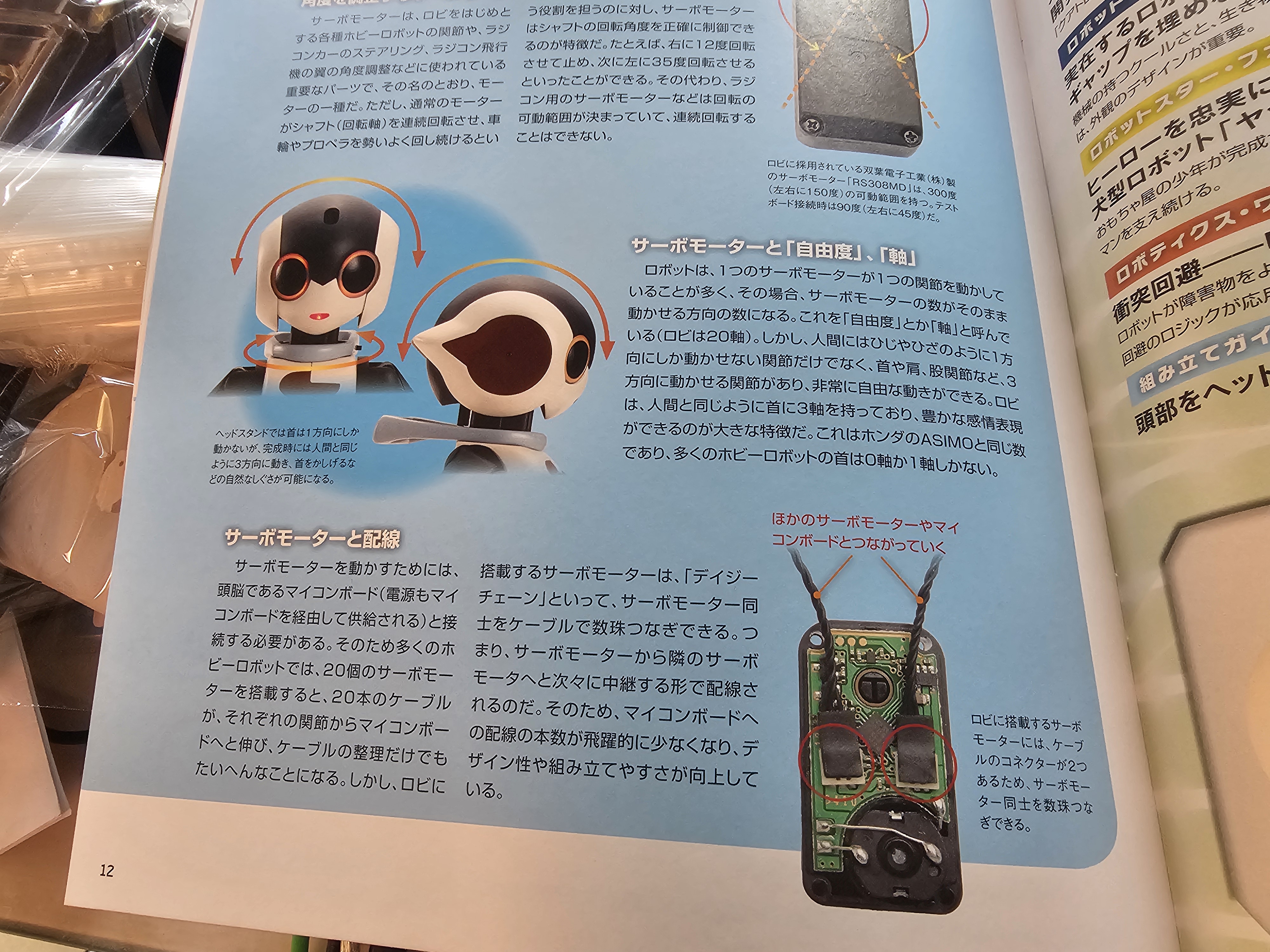
로비의 목 회전은 사람의 목 회전과 같은 총 3축으로 되어있다고 나와있다!
그리고 로비나 사람이나 관절이 여러개이라면서 혼다의 아시모 로봇도 여러개 관절이 있다면서 나와있는데, 아시모를 보다보니 비슷한 생김새의 오준호 박사님이 개발하셨던 휴보 라는 로봇도 생각이 났다. (박물관에서 봤었던 것 같은데.. 몇년 전에 봤던거지;;)
암튼 도데체 저 작은 것 안에 모터가 어떻게 3개가 들어갈지는 모르겠지만.. (모터에 모터에 모터 이런식으로 붙을려나?)
뭔가 앞으로의 조립이 굉장히 기대된다!!

아무튼 최종적으로 6권까지 조립된 테스트 로봇! 신기하다!!
(근데 눈알을 보니 갑자기 든 생각이 지난번에 발표된 논문이 생각이 났다.. 사람의 눈알 사진을 보고 3D로 어떤거 보는지 형상을 만드는 인공지능에 대한 거..)
뭐 아무튼 끝!
'로봇 > ROBI' 카테고리의 다른 글
| Robi 로봇 제작 - 8권 (귀 덮개, 모터 케이블 조립) (0) | 2024.07.10 |
|---|---|
| Robi 로봇 제작 - 7권 (귀 조립) (0) | 2024.07.10 |
| Robi 로봇 제작 - 5권 (모터 테스트 모형 부분 조립) (0) | 2024.07.01 |
| Robi 로봇 제작 - 4권 (머리, 모터 부분 조립) (0) | 2024.07.01 |
| Robi 로봇 제작 - 3권 (테스트 보드 모형, 케이블 조립) (0) | 2024.07.01 |