|
 |
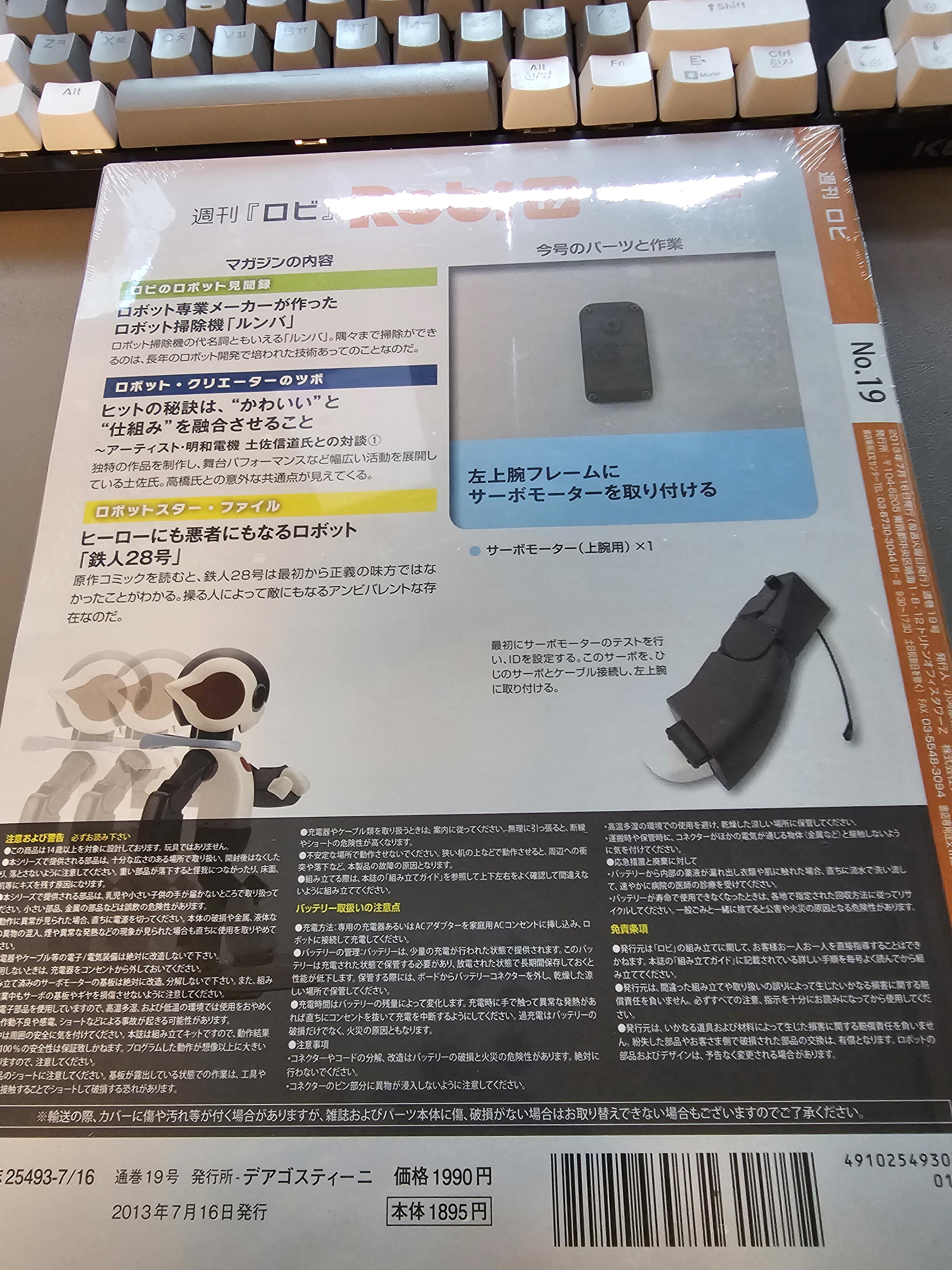
이번엔 22권이다!
내가 이전에 업로드한 21권은 9월 4일에 올렸는데.. 그동안 업로드 못한 이유는.. 학생 연구원에서 맡은 일을 하거나 과제들을 하면서 다른 일들을 다 미루다보니.. 적지 못했다.. 현재까지는 로봇을 50권 정도까지 조립하고.. 작성하고 있다..
아무튼 이번 책 내용은!
 |
 |
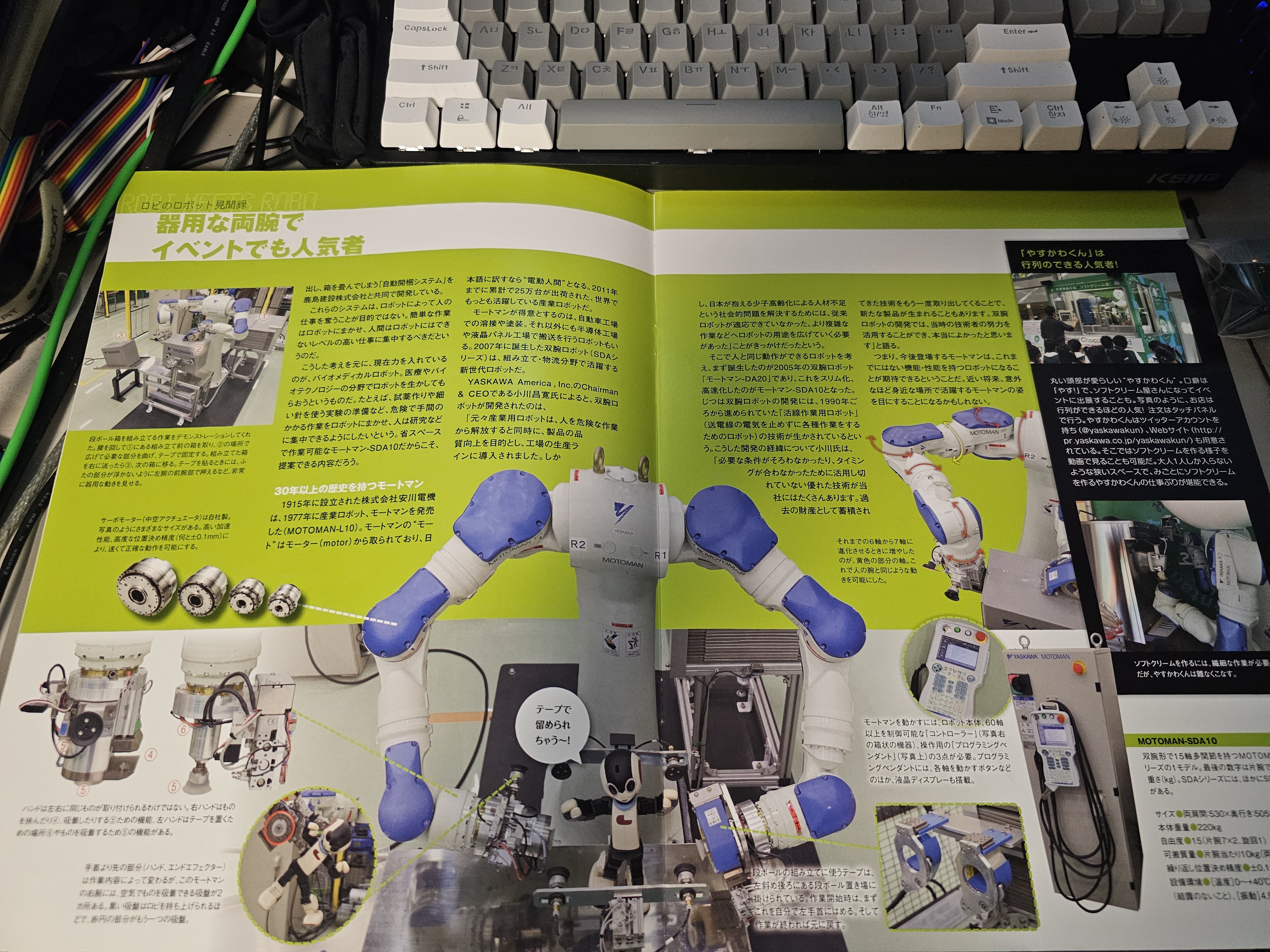
첫번째 이미지는 축구 로봇에 대한 이야기이다..!
개인적으로 축구는 않 좋아하지만.. 로봇 축구는 좋아한다..!
저것을 보고 생각난 영상이 있다.. https://youtu.be/gFjAltC2pj0?si=CRwMzbqRtKad_LUg 이 영상.. 2050년까지.. 인간과 로봇이 대결할 수 있도록 로봇을 만드는 것.. 에 대한 내용이다.
아무튼 저기에는 Nao Robot이 나오고 있는데.. Nao Robot을 내가 처음으로 알게된건.. 2012년 여수 엑스포였다. 그 때 당시에는 시간 때문에 로봇관이 종료되던 것을.. 다른 사람들이 따지거나 우리 아빠도 따져서 겨우 들어갔던건데.. 그러다 보니.. 그 때는 Nao Robot을 보여주지는 않았다. 가만히 앉아있는건 보였던 것 같은데.. 뭐 그래도 이후에 다시 여수 엑스포를 찾아보면서 알게 되긴 했는데.. 개인적으로 내가 제일 좋아하는 로봇 중에 하나이다. 프랑스의 알데바란에서 제작하고 현재는 일본 소프트 뱅크로 인수 되면서.. 아직까지도 판매하고 있는 Nao Robot.. 2000만원이지만.. 언젠가는 사보고 싶다.
그런데 한가지 별로였던 건.. 도데체 왜 저 책에는 Darwin OP가 안나왔던 것인가이다.. 현재 내가 제일 좋아하는 로봇인데..!!
뭐 다른 나라 로봇이라서 안나온 것도 있겠지만.. Darwin OP도 우승을 많이 한걸로 알고 있는데.. 그런 귀여운 로봇이 안나왔다는게.. 조금 아쉽긴 하다.. 내가 Darwin OP를 처음에 본 것도 여수 엑스포인데.. 거기에서 축구를 하던 것이.. 아직도 기억에 남는다.. 내가 분명 7살일텐데.. 어떻게 그걸 기억하고 있는거지..
그리고 내가 어릴 때 로봇을 판매하던 사이트에.. Darwin OP 2가 2000만원에 판매하던걸 본적이 있다.
그 때는 돈에 감각이 없어서 어른 되면 사야지 했는데.. 지금은 단종되기도 했고.. 그 돈이 얼마나 큰 돈인지도 알게 되었다..
아무튼 Darwin OP 로봇을 계기로 데니스 홍에 대해서도 알게 되고.. 얼마 전에는 안될과학 영상에서 Darwin OP가 오픈소스라는 것도 알게 되었는데.. 이것 때문에 무조건 군대를 가기전이든 가고난 후든 만들고 싶다고 생각했다.
그래서 예전에 구상한게.. Darwin OP 2에 들어가는 모터는.. MX 28T로 개당 26만원 하던데.. 이거를 우리 집에 있는 AX 12A 모터로 바꿔서 제작하면 되지 않을까 라는 생각을 했었다. 다만 문제가 몇가지 있어서.. 현재는 미루고 있는데..
첫번째는 내가 Fusion 360 같은 CAD를 못 만진다는 것과.. 두번째는 Darwin OP 2의 메인보드나 관련 부품들은 더 이상 판매하지 않는 다는 점이다.. 물론 대체 부품은 있지만.. 이런 점 때문에.. 제작은 더욱 어려워질 것이라고 생각했다.
그래서 데니스 홍 페이스북을 살펴보다가 Robex에 데니스 홍의 RoMeLa 연구소 로봇들이 온다고 해서.. 경기도 일산에서 바로 부모님과 2024년 10월 26일에 운전해서 간적이 있었는데.. 시간이 거의 끝나기 전이라서 로봇은 많이 없었지만.. 내가 그 토록 보고 싶던 Darwin OP 2가 전시되어 있었다..!! (그 전에 실제로 봤던 로봇은 Darwin OP.. 밖에.. 없던..)
아무튼 사실 데니스 홍과도 실제로 얘기하면서 메인보드는 어떻게 하면 구할 수 있을까요? 라는 것과 AX 12A로 만들어보고 싶은데 몇가지 문제가 있을까요? 라는 질문 등을 하고 싶었는데.. 내가 사람들과 얘기를 잘 못한다는 것을 잊고 있었다.. 끝날 때 되더니 사람들은 다 가고 정리하고 있었는데.. 그 때 솔직히 가서.. 물어보고 싶었는데.. 결국 못 물어보고 나왔다.. 언제 다시 볼 수 있을지도 모르는데.. 지금 생각하면.. 왜 그냥 나왔을까.. 라는 생각만 든다..
내가 어릴 때 부터 사람들을 도와줄 수 있는 로봇을 제작하자 라는 마음을 먹고 지금까지 유지하고 있는데 그런 로봇을 만들기 위해선 RoMeLa 연구소를 가는 것을 1순위 목표로 하고 싶은데.. 결국 내 성적이나.. 관련된 문제로.. 포기를 해야하나..라는 생각 밖에 들지 않기는 하다..
아무튼.. 지금 생각하면 왜 말을 걸지 않고.. 그냥 나왔는지.. 후회만 된다..
뭐.. 그래도 언젠가는.. Darwin OP 2를 만들고 싶기에 어떤 구조인지 파악하기 위해서 사진도 찍긴 했었다..!
 |
 |
MX 28T와 AX 12A의 모터 사이즈가 달르고 힘이나 성능이 달라서 솔직히 만들 수 있을지는 모르겠지만.. 최대한 빠른 시일 내로 CAD 쓰는 방법을 독학해서 라도 AX 12A를 MX 28T 크기와 동일하기 쓸 수 있는 케이스를 만들어서 3D Printer으로 저렴하게 제작해보고 싶다..!!
아무튼 첫번째 사진에 대해서 너무.. 많이 쓴 것 같지만.. 암튼..
두번째 사진은 로봇 디자인에 관련된 얘기인데.. 로봇을 만들기 위해서는 어떤 디자인이 필요한지에 대한 인터뷰이다.
로봇을 디자인할 때는 단순히 멋진 디자인이 아닌 기능성과 균형이 중요하다는 얘기와 애니메이션 로봇과 현실 로봇의 차이에 대해서 말하고 있다. 또한 메카닉 디자인에선 로봇의 관절과 동작이 자연스럽게 보이도록 제작해야한다고 하는데.. 지금 봐서 알았지만.. 내가 좋아하는 로봇의 디자인 이름이 메카닉 디자인인걸.. 처음 알았다..
Sony의 Aibo는 뭔가 진짜 같은 느낌이 들도록 디자인 한 것 같은데.. 내가 좋아하는 로봇을 생각해보면.. 다윈 OP 로봇, 나오 로봇, 메로 로봇, 제니보 로봇 등 전부 메카닉 디자인인 것 같다..
아무튼 난 단순하게 생기거나 제니보나 Darwin OP 같은 로봇들이 귀엽고 신기해서 역시 좋은 것 같다..
 |
 |
 |
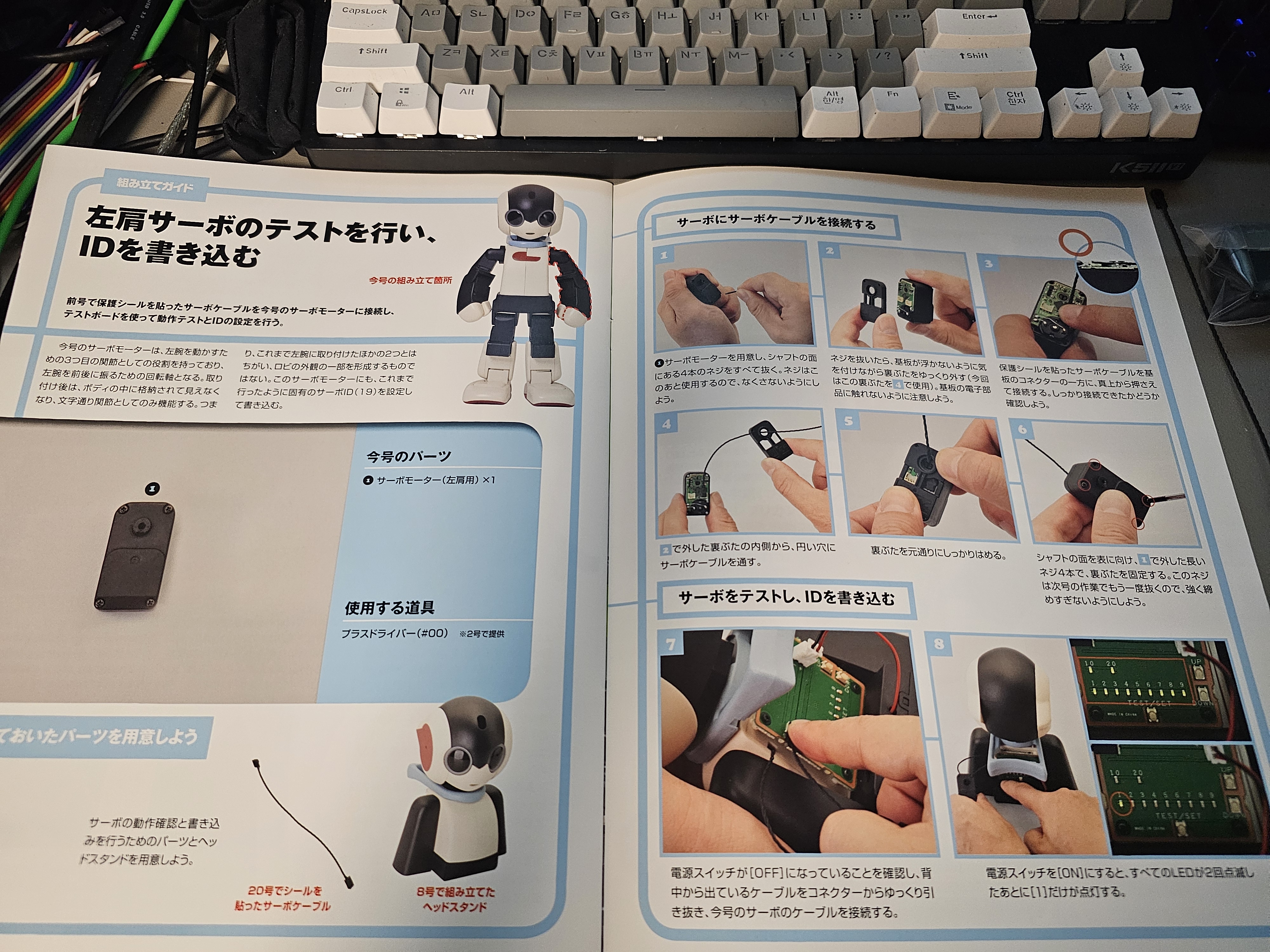
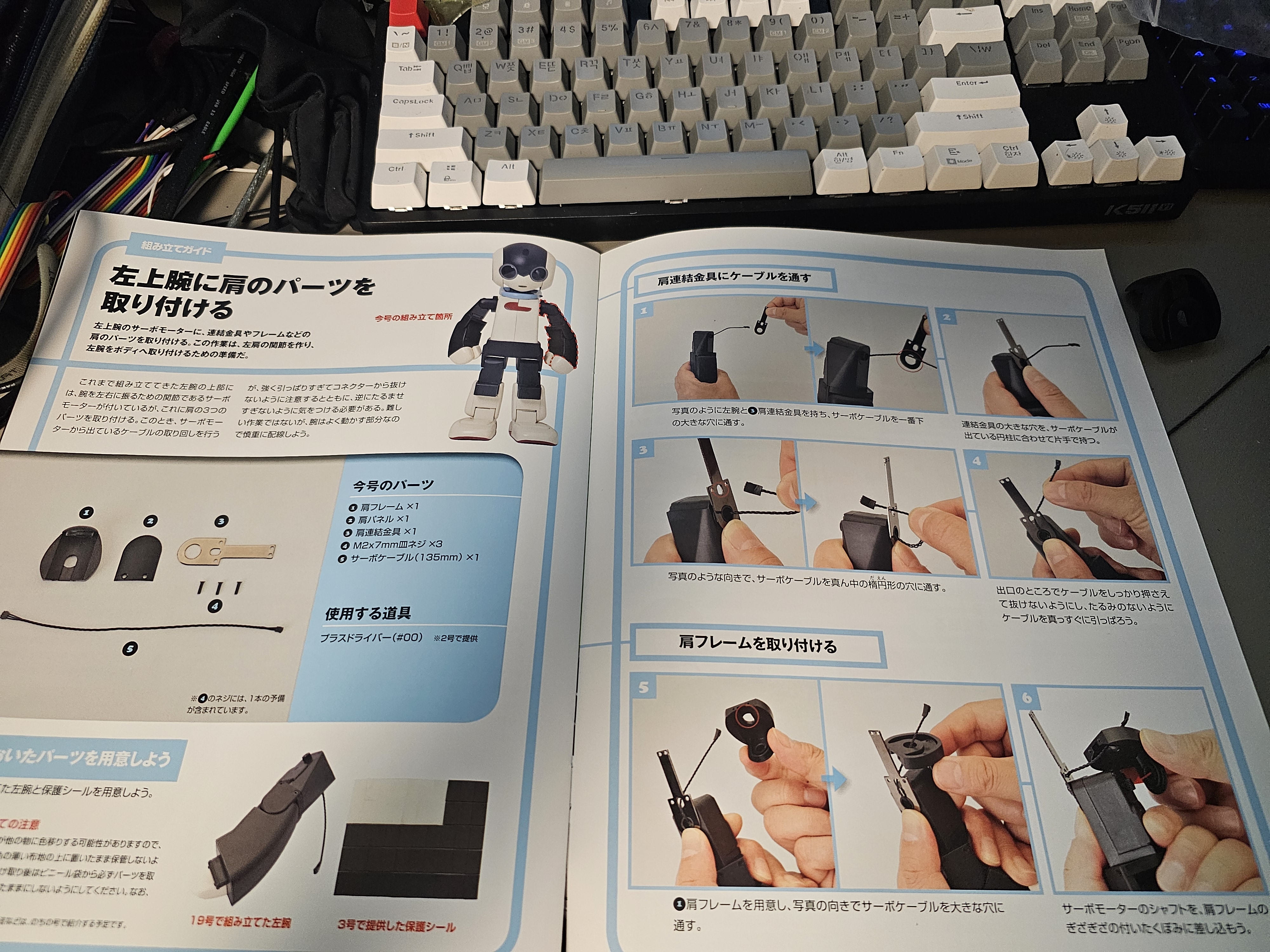
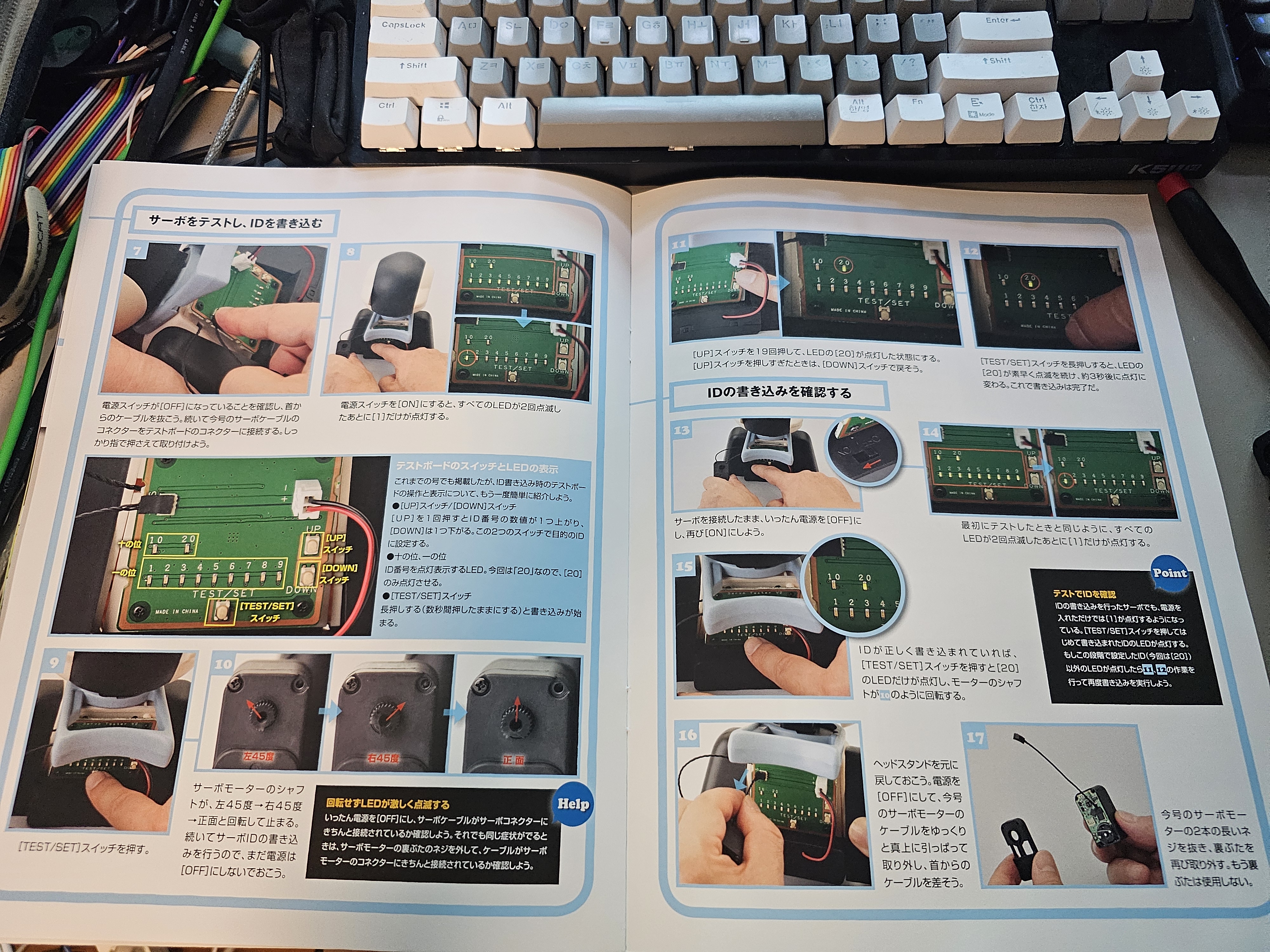
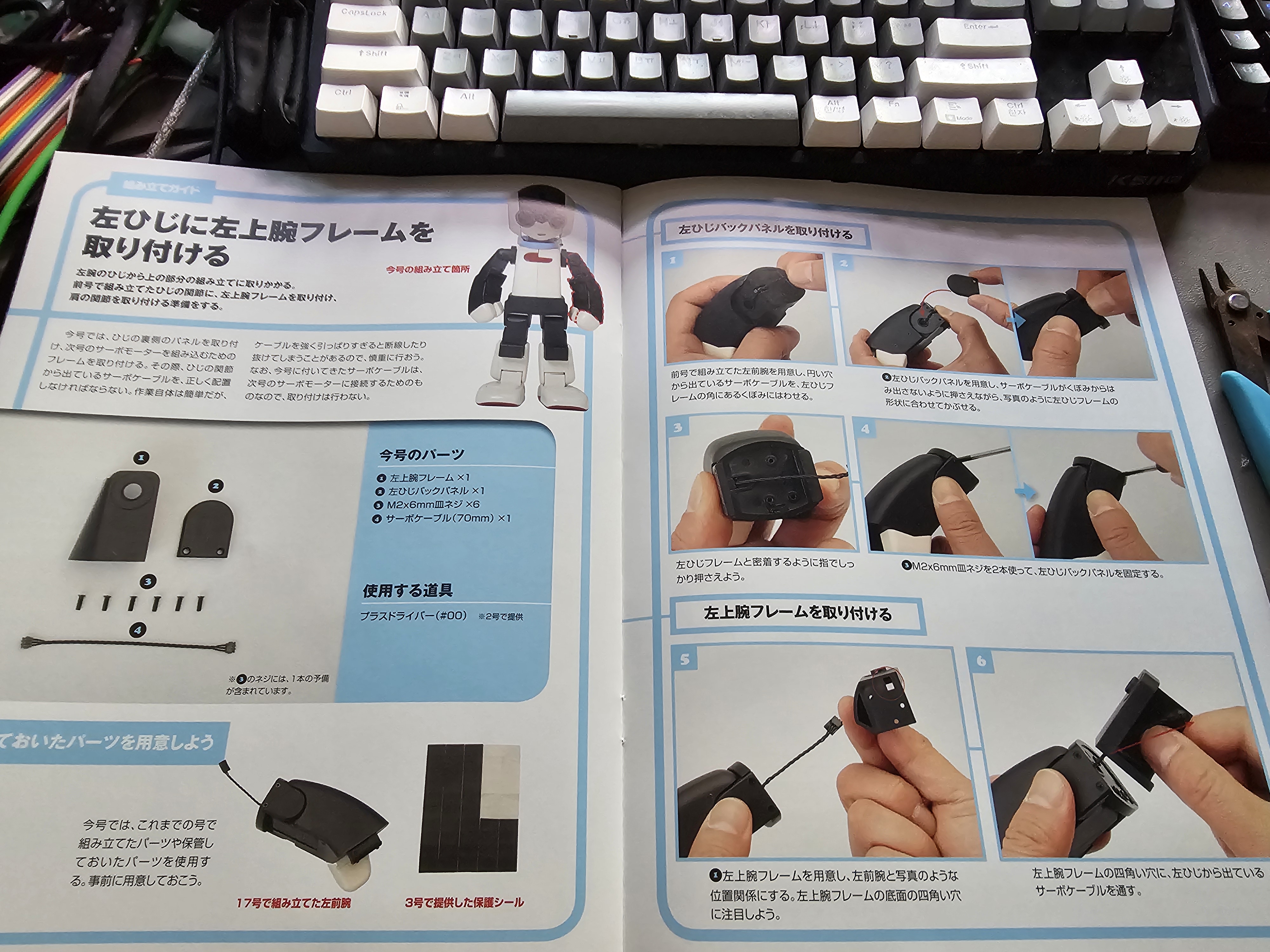
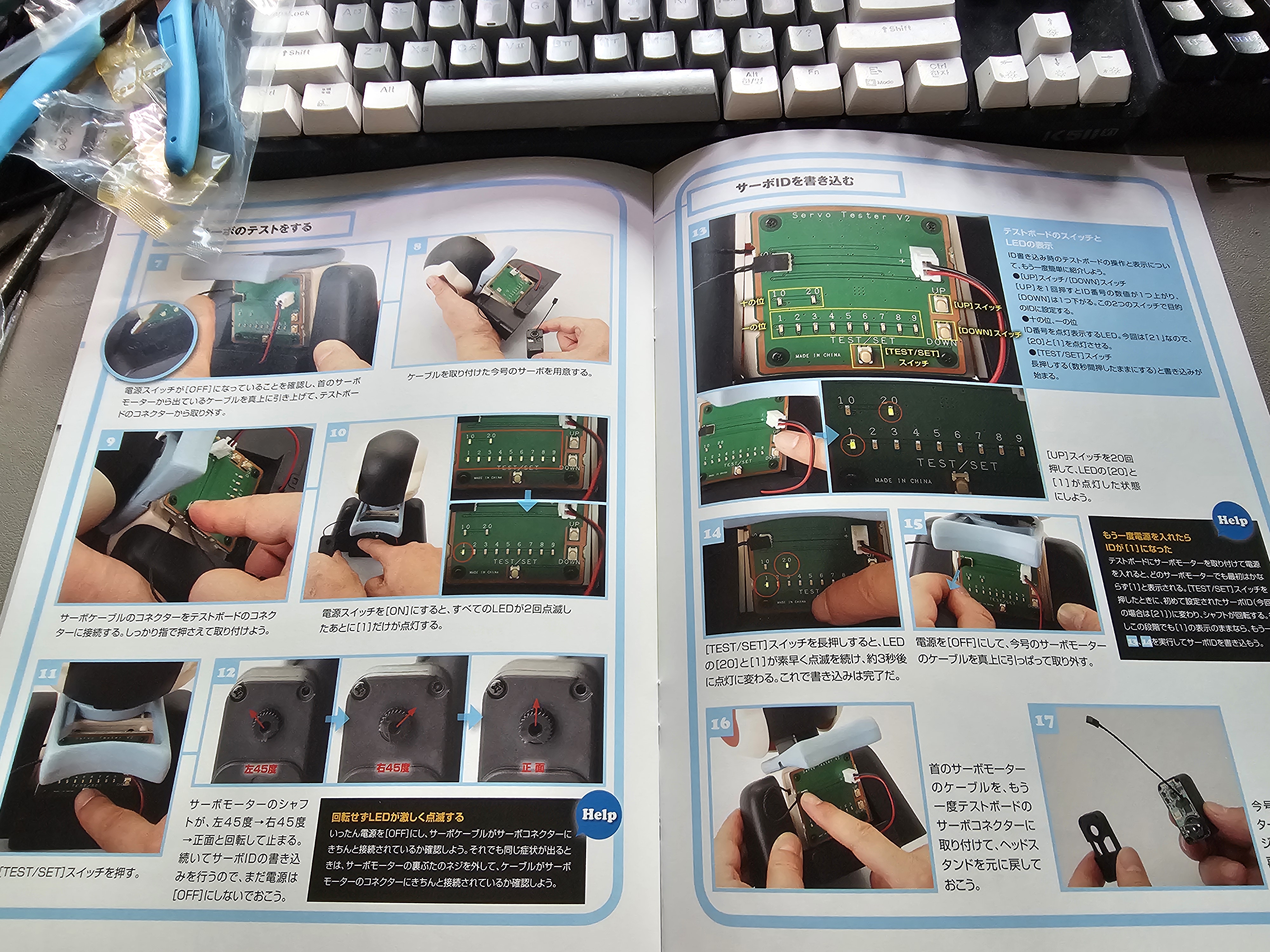
아무튼 이번 책 내용도 이전에 올린 14권과 방향만 다를 뿐 거의 같은 내용이다. 그렇기 때문에.. 제작하는 것에 대한건 패스!
 |
 |
 |
이렇게 조립하여.. 왼쪽 팔과 오른쪽 팔 모두 완성했다!!
그리고 임시로 겹쳐보았는데..!

팔만 봐도 신기하고 뭔가 귀엽다!!
암튼 22권 조립은 끝!!
참고로.. 지금까지 쌓은 박스가..

이정도다..
암튼 로봇 만들고 싶고.. RoMeLa 연구소..에 가서 데니스 홍과 로봇에 대해서 얘기를 해보고 싶다..
'로봇 > ROBI' 카테고리의 다른 글
| Robi 로봇 제작 - 21권 (반대 팔 조립) (0) | 2024.09.04 |
|---|---|
| Robi 로봇 제작 - 20권 (반대 팔 조립) (0) | 2024.09.04 |
| Robi 로봇 제작 - 19권 (반대 팔 조립) (0) | 2024.09.03 |
| Robi 로봇 제작 - 18권 (반대 팔 조립) (0) | 2024.09.03 |
| Robi 로봇 제작 - 17권 (반대 팔 조립) (0) | 2024.08.14 |