
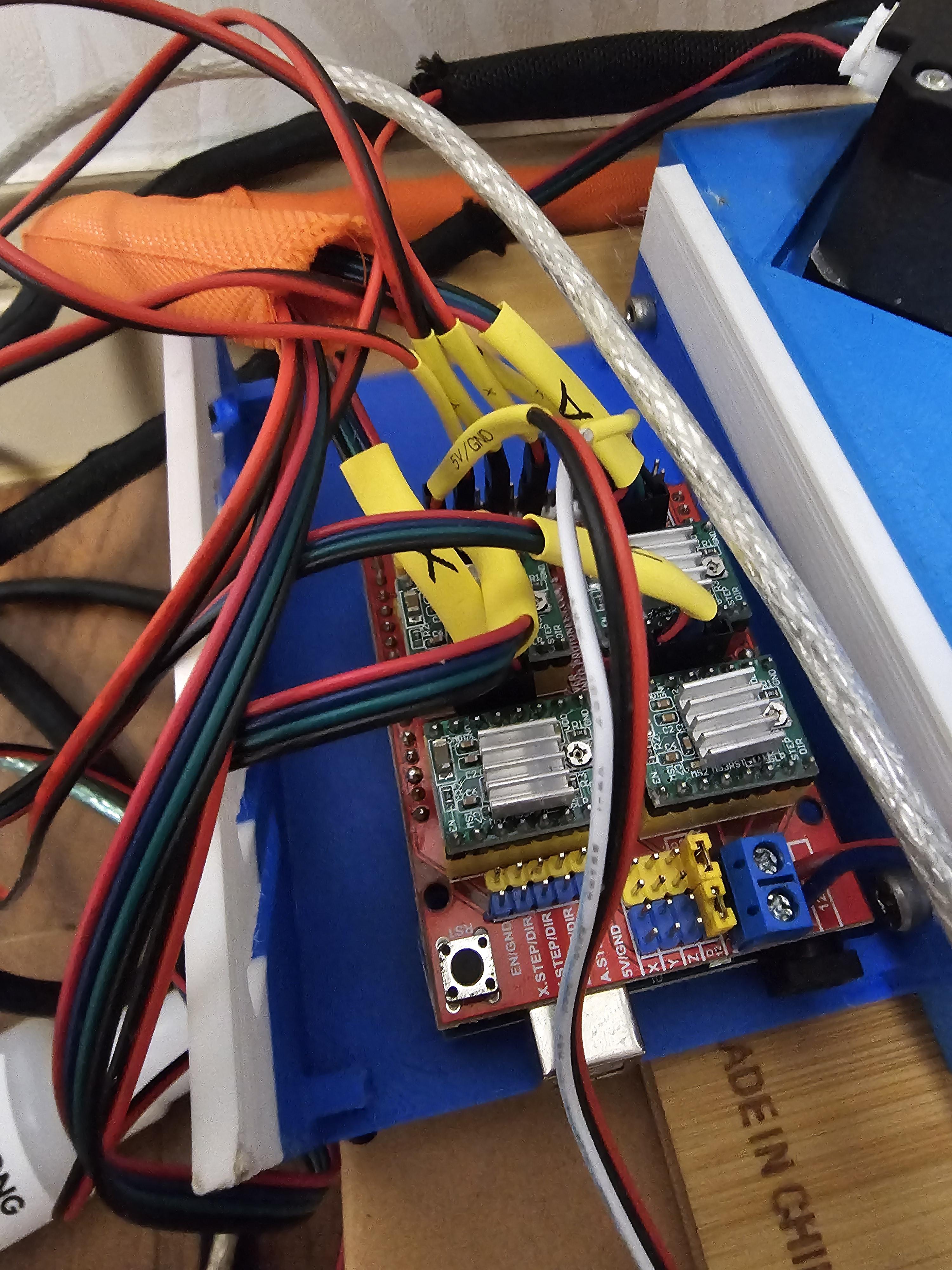
이제.. 다 조립했으니.. 보드에 선을 연결해야하는데.. 제일 헷갈린 부분이 여기다..
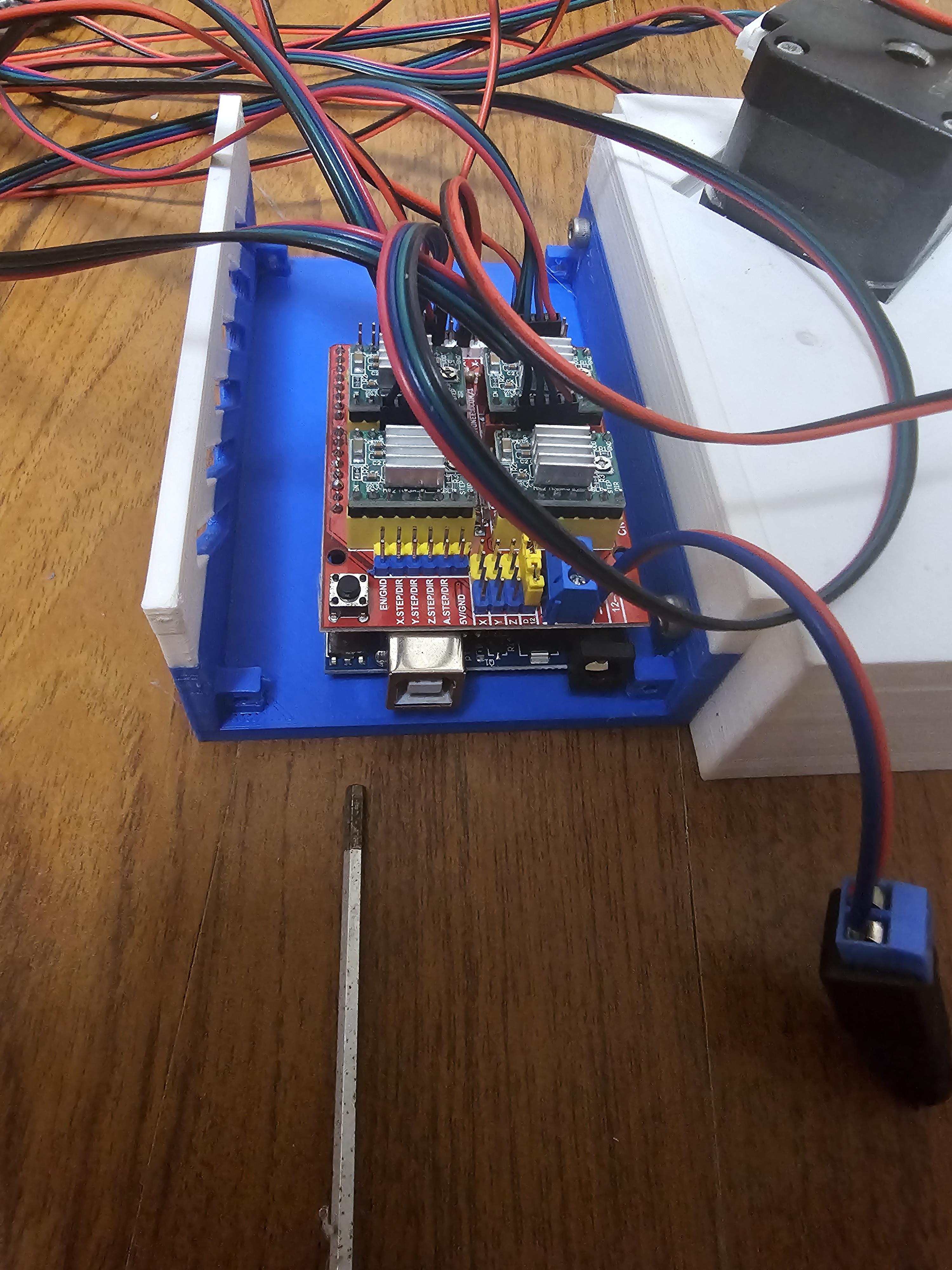
최대한 찾아서 끼우긴 했지만.. 계속 잘 못 끼웠었었다.. 그러다가 결국엔 끼웠지만..
저 사진에 보이는 것 처럼 앞쪽에 점퍼핀 노란색이 보일꺼다.. 저게 CNC 쉴드에서 빨간색 부분에 모터 드라이버 끼우는 곳이 있는데 거기의 모터를 제어를 킬꺼냐 말꺼냐이다.. 끼우면 키는거.. 저걸 처음에 몰랐어서 왜 안되지라고 생각했는데.. 검색해보니 어쩌다 알게 되었다. 그 후에는 좀더 잘 움직이게 하기 위해
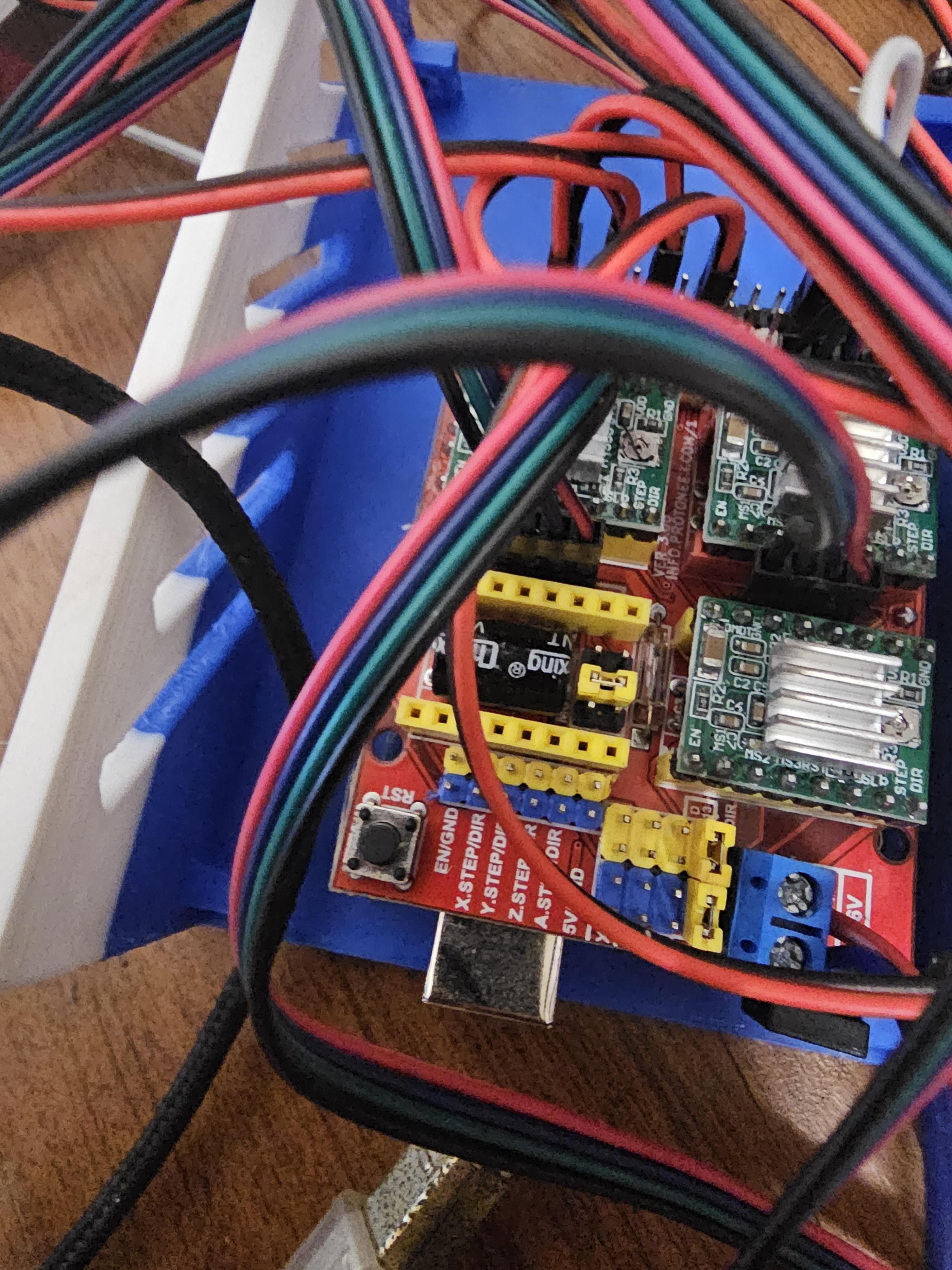
안쪽에도 점퍼핀을 끼웠다. 달라지는건 좀더 여러 스텝으로 제어할 수 있는 것 같다. 근데.. 저 점퍼핀.. 원래 나는 점퍼핀이 딱히 필요가 없어서 사지를 않았었는데.. 당장 필요하다보니..
 |
 |
여러곳에서 뜯어서 사용했다.. 현재는 점퍼핀을 사고 다시 끼운 상태이지만.. 진짜 있는거 다 뒤져서 점퍼핀을 뺐는데.. 딱 필요한 만큼만 있었다.. 아슬아슬했지만.. 겨우 끼운 후에 어느정도 완성할 수 있었다.
근데 한가지 단점인건.. 가만히 세워두면 지 혼자 고꾸라진다..
이걸 해결하기 위해서는 아래에 판이 필요한데 이 판을 따로 구매하는건 너무 돈 낭비 같아서.. 다이소를 갔다.
그랬더니.. 딱 나에게 필요한 나무판자가 있었다. 바로.. 도마!

기억도 안나는 크기를.. 대충 프린트기 사이즈를 생각해서 된다는걸 알고 바로 사왔다..!
그리고 바로 하단부를 고정시키기 위해 하단부의 평면을 Fusion 360에서 가져왔다.
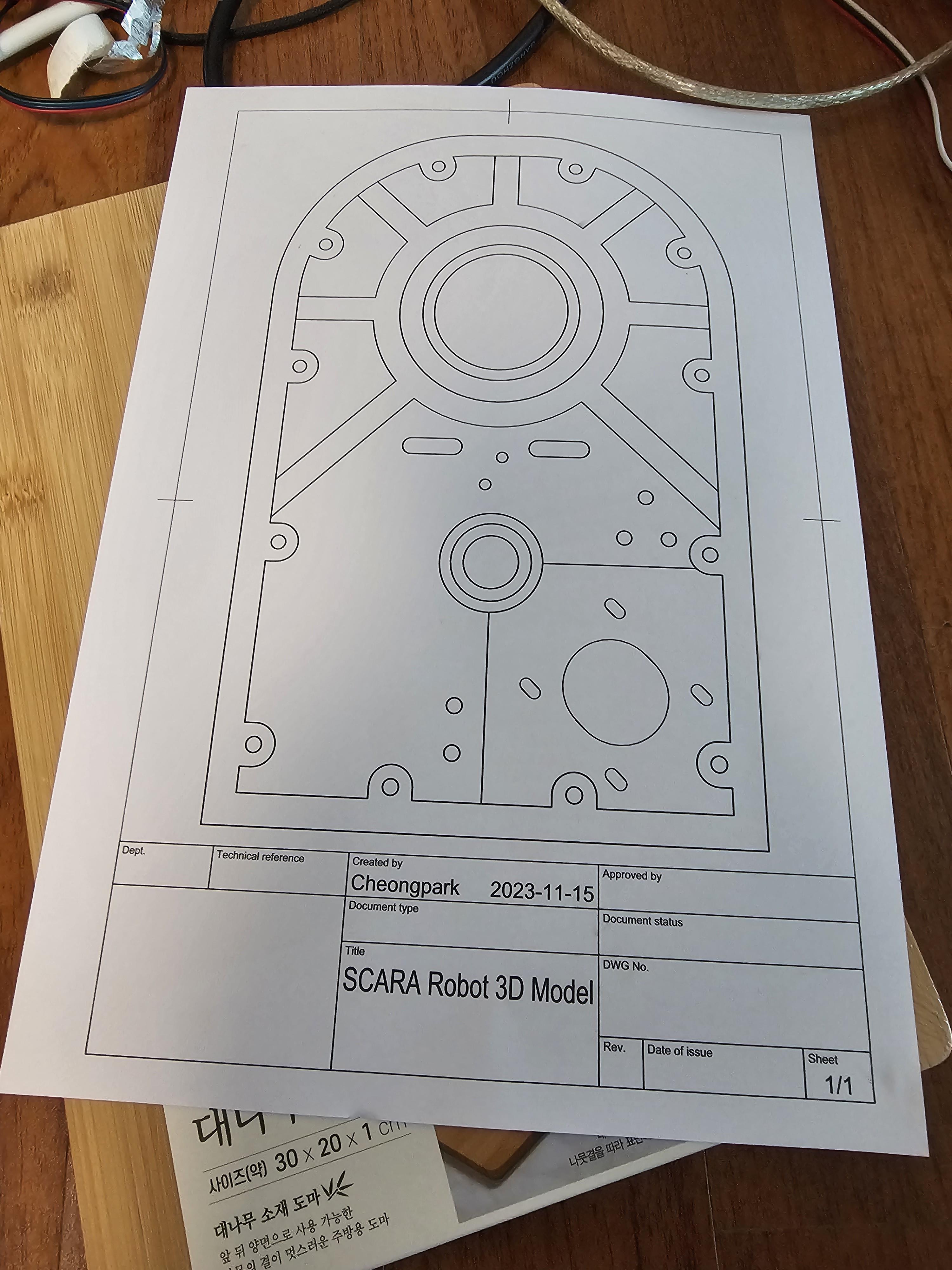
이렇게!.. 신기한건 딱 하단부하고 맞는다는 것..
여기에서 다운받으면 된다!
암튼 저걸 이용해서 풀로 붙인다. 근데 붙일 때 도마를 감싸고 있는 비닐은 안때고 붙였다. 이유는 붙일 때 비닐에 붙게 하고 나중에 비닐만 제거해서 종이를 뗄 수 있기 때문!!
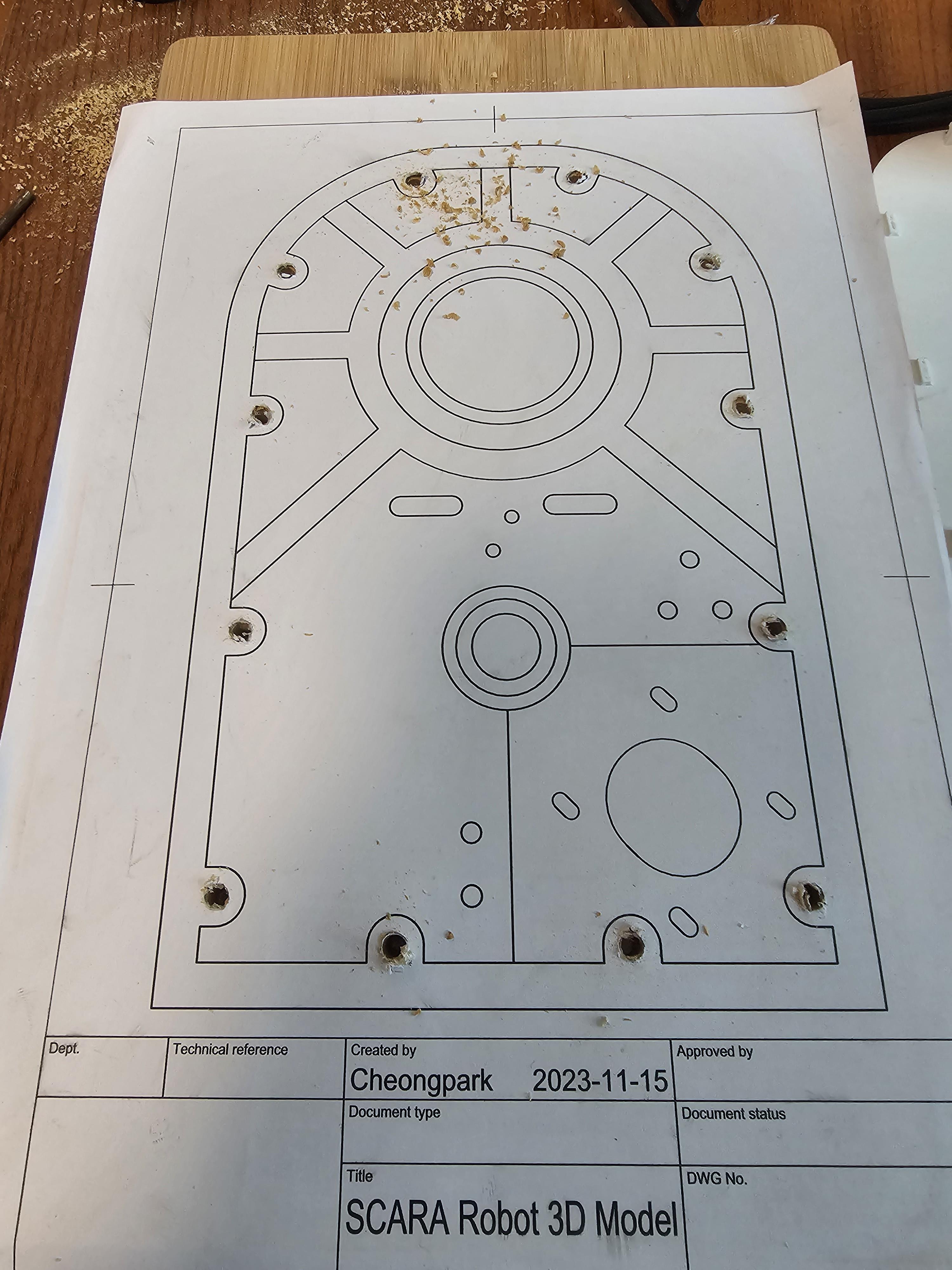
붙인 후에는 잘 맞춰서 드릴로 뚫어주고

누구나 있는 이 드릴 비트를 이용해서 flat 나사가 들어갈 구멍을 뚫어주었다.

뚫을 때 기준을 안세워서.. 전부 크기가 달르긴 하지만.. 전부 잘 들어간다!.. 그리고 놀라운건 테스트로 끼워봤는데 하단부하고 정확하게 일치한다..!


근데.. 여기부터는 사진을 찍지는 않았는데.. 저기에 너트를 넣는데.. 문제가 발생했다.. 저 사이에 서포터를 만들어서 출력하는데 서포터를 제거하면서 저 부분이 헐렁해져서 너트가 헐렁하게 끼워져서 도마를 끼운 상태에서 계속 헛돌아서.. 빼는데.. 결국에 안빠진다.. 그래서 그냥 강제로 비틀어서 다시 출력할 생각으로 망가트렸다.. 결국엔 망가져서 다시 출력하고 출력하는 겸 나머지도 다시 재출력해서 흰색에서 대부분 파란색으로 바뀌었다.. 왜냐면 학교에서 필라멘트를 4개를 그동안 동아리에서 다른 팀꺼 출력해준 덕분이라면서 사주셨는데.. 그 중 하나가 파란색 필라멘트이기 때문이다..
암튼 재출력 했는데도.. 헐렁했다.. 이유는 뭐.. 그냥 프린터가 캘리브레이션이 되었는지 그냥 헐렁하다..
솔직히 이 문제는 해결할 수 없어서.. 다이소가서 순간접착제를 살려고 했는데.. 나는 미성년자라는 것이다..
그래서 나중에 부모님하고 이동할 때 한번 다이소 같이 가자 해서 그때 샀다.. 근데 항상 순간접착제를 살 때 마다 항상 어디론가 부모님이 쓰실려고 하면서 사라지는데.. 그것 때문에 그냥 2개를 샀다..
암튼 그걸로 단단하게 고정시키고 하루정도 말린 후에 끼웠는데.. 모두 다 헛돌지 않고 잘 돌아간다..! 심지어 너트 사이까지 다 들어가서 좀 돌리는데 빡세긴 했다.. 암튼 전부 제작해서

이렇게 완성했다!!!
선 정리하는건 알리에 쉽게하는게 있길래 바로 사서 했다..!
암튼 흰색으로 만들려던게 완전 파래지긴 했는데.. 진짜 고정도 잘 되고 잘 되었다!!
그리고 선을 끼울 때 헷갈리기도 해서.. 한번 다 끼우고.. 알리에서 수축튜브에 글 새길 수 있게 해주는 카트리지가 있길래 그것도 사서 저렇게 모두 정리를 했다!!
근데 이제부터가 진짜 문제이다.
나는 이걸 제작하기로 한건 그냥 재미를 위한 것인데.. 학교에서 발표를 해야하다보니.. 인공지능과 결합해야한다..!
근데 결합할려면 이 로봇을 제어하는 프로그램이 필요한데.. 기본 예제로 주어지는 프로그램은.. 너무 이상하기도 하고 제어가 멋대로 된다.. 그냥 그 프로그램은 진짜.. 별로다라고 생각된다.. 그리고 펌웨어에도 여러가지 문제가 있어서 전부 내가 제작하기로 했다.
시간 안에 다 할 수 있을진 모르겠지만.. 이 글을 쓰는 현재도 제작 중이다.
현재 글을 쓰는 기준으로 만든 것 까지 보여준다면
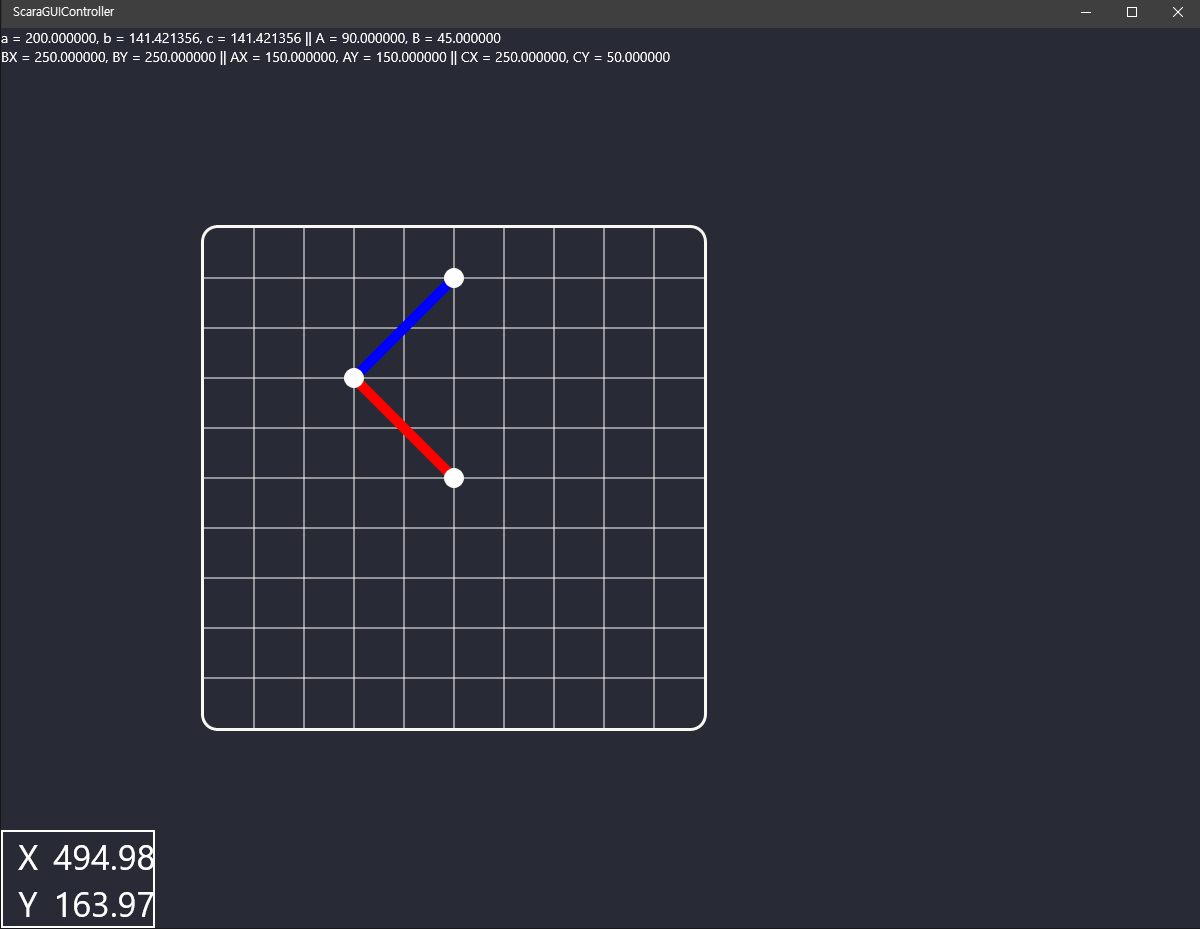
이렇게 만들고 있다. 저 중앙 부분이 로봇의 팔 부분이다. 근데.. Inverse Kinematics를 사용해야하다보니.. 어렵긴 한데.. 다행히 2개의 팔의 경우 삼각함수로도 가능하기 때문에 이걸로 현재 계속해서 만들고 있다. 처음 해보는 GUI 프로그래밍이긴 한데.. 일단 최대한 해보고 있다. 또한 C++로 제작하고 있다..! 심지어 크로스 플랫폼으로 작동 될 수 있도록 WinRT/C++로 제작하고 있다..!
'로봇 > Scara' 카테고리의 다른 글
| SCARA 로봇 제작하기 Pt. 5 (제작) (0) | 2023.12.11 |
|---|---|
| SCARA 로봇 제작하기 Pt. 4 (제작) (0) | 2023.12.11 |
| SCARA 로봇 제작하기 Pt. 3 (제작) (0) | 2023.11.28 |
| SCARA 로봇 제작하기 Pt. 2 (조사 - 개별적 부품) (0) | 2023.11.26 |
| SCARA 로봇 제작하기 Pt. 1 (조사 - 3D 프린터 부품) (0) | 2023.11.26 |