
이제 하단부 위의 팔 부분을 만들어야 한다.
여기가 제일 어려웠고.. 재출력을 몇번이나 계속 했던 부분이다..
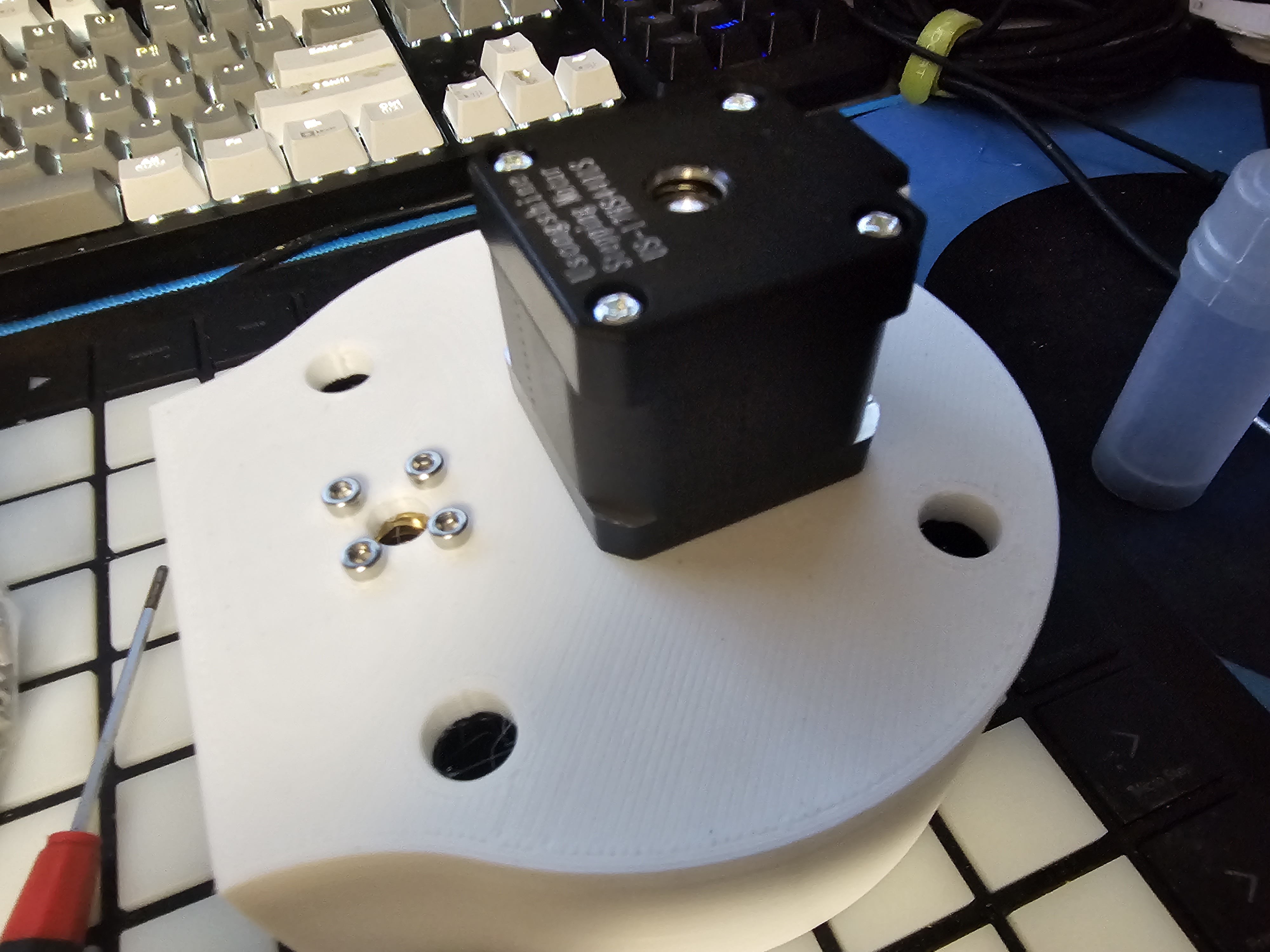
일단 팔 부분을 지탱할 부분을 만들어야 한다. 저번 글에서 이어지는데
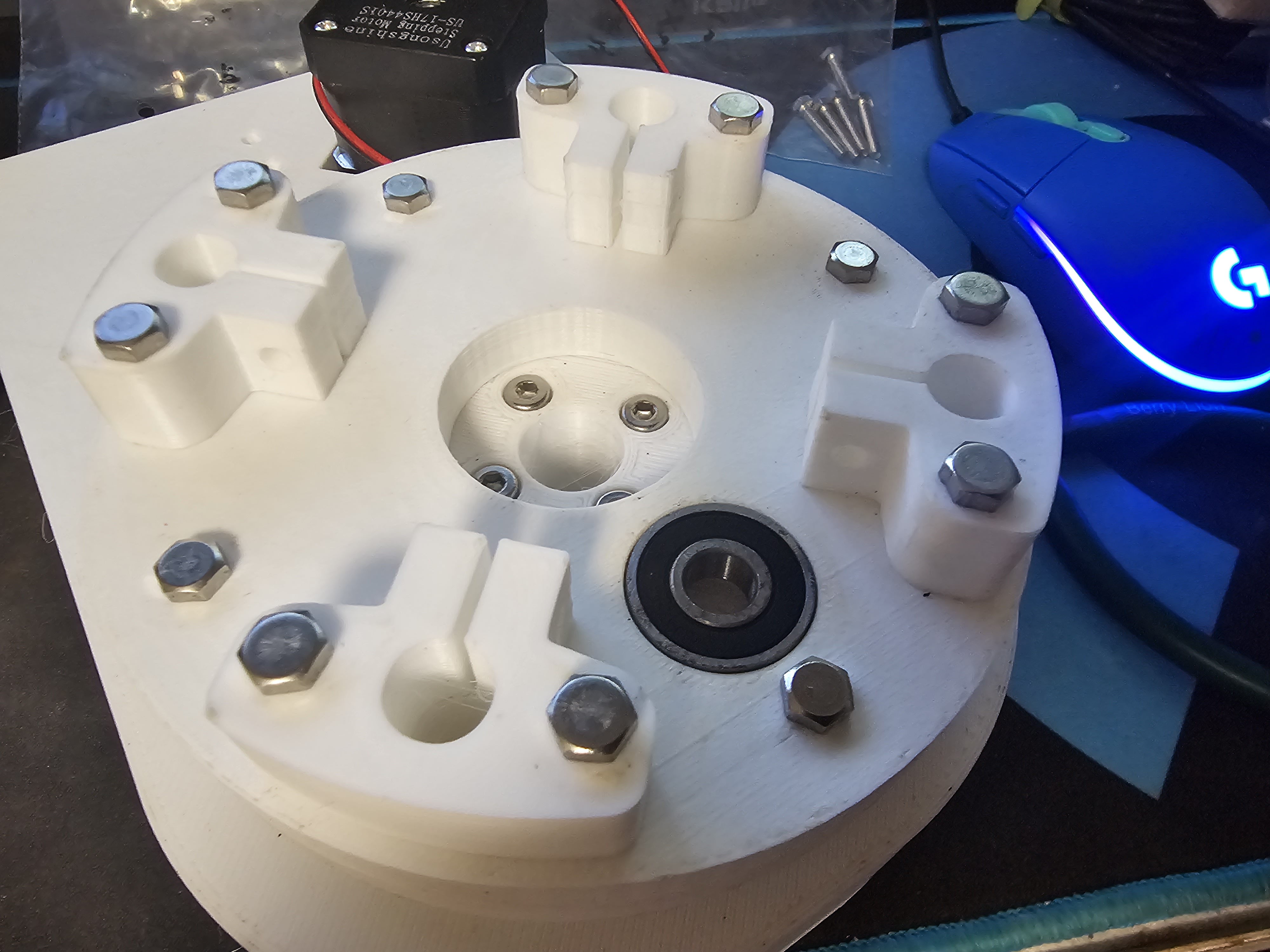
이 부분을 조립한다. 하단 부분 위에 부품을 올려서 볼트와 너트로 조립을 했다.. 근데 조립을 해보면서 알게된건.. 영상에선 분명 육각 볼트를 사용하라 해서 했는데 겉으로 보이지도 않고 하니.. 그냥 일반 육각 렌치 볼트로 하는게 좋을 것 같다.. 그리고 저 부분을 단단하게 조립하고 하단 부분에 끼우는걸 추천한다.. 아니면 제대로 조립하기도 어렵고 잘 되지를 않는다.
 |
 |
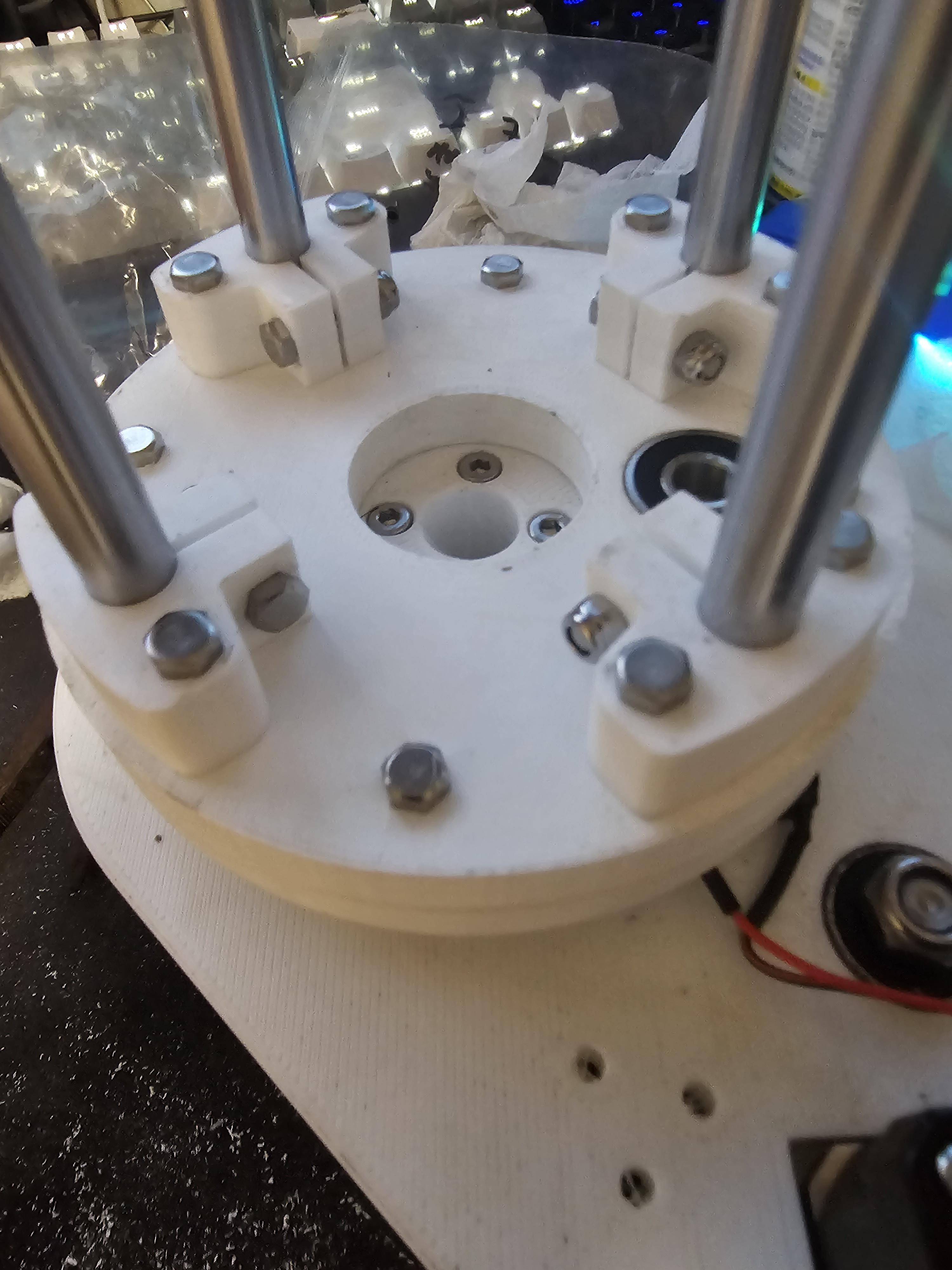
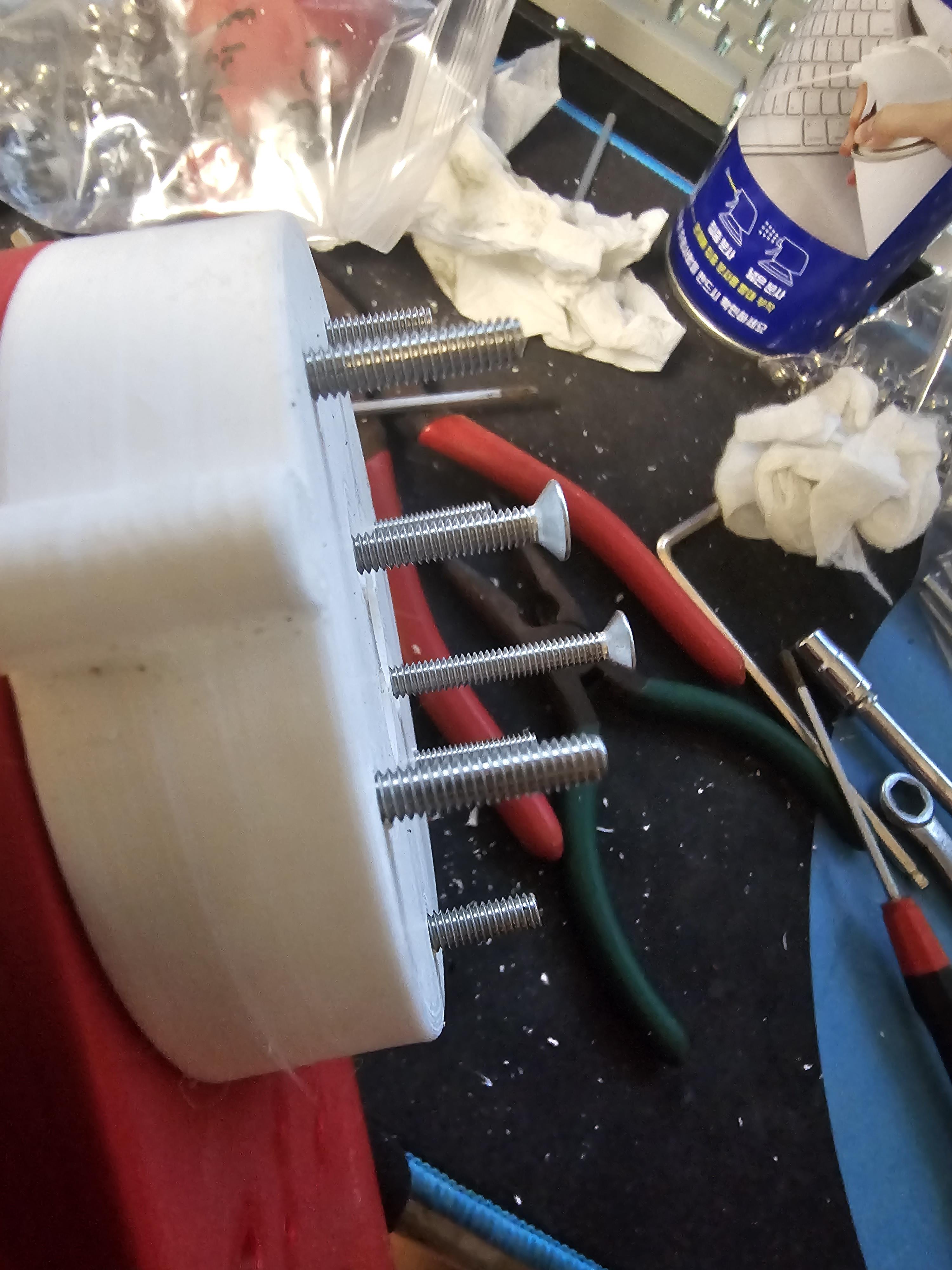
그 후엔 10 * 400mm 선형 봉을 끼운다. 여기에서 어려운건 끼우는 구멍이 좁았던지라 잘 안끼우면 다 들어가질 않아서 마지막꺼를 끼울 때 제대로 안들어갈 수 있다. 그렇기 때문에 최대한 끼우고 마지막에 덮개로 안보이게 해준다.
그 후엔 이 부분을 조립한다.
 |
 |
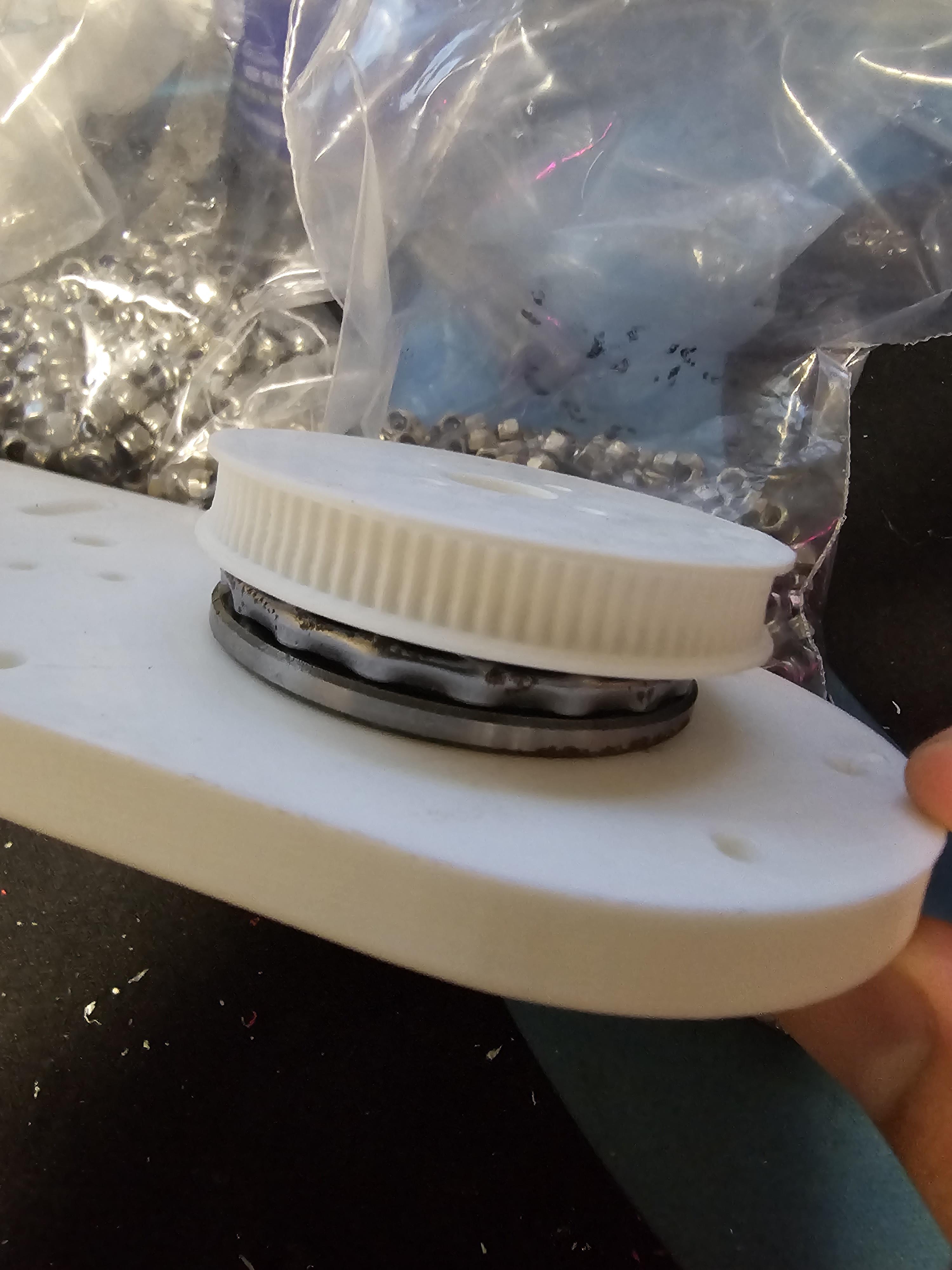
여기도 어려웠는데.. 저기 끼워져있는게 선형베어링이다.. 근데 저게 지름이 29mm인데.. 3D 프린터가 캘리브레이션이 안되어있어서.. 끼워야하는 부분의 내부 지름이.. 29mm보다 좀 많이 작았다.. 그래서 최대한 주위를 갈아서 그나마 억지로 끼웠는데.. 다 조립한 후에는 한번 저 부분을 완전 교체했다.. 이유는 너무 갈아서 헐렁하기도 했었고.. 갈면서 약간씩 오차가 발생했다.. 그래서 위 아래로 움직일 때 마다 이상한 소리가 나기도 하고 여러가지 문제가 많았다.. 그래서 무조건 추천하는건 칼리브레이션을 해서 오차를 줄인 후에 출력하고 넣는 것이다.. 나중에 새로 출력한 부품은 정확하게 들어갔다.
저 부분이 제대로 안되면 무거운 팔을 들고 있어야 하는 부분이기 때문에 팔이 쳐져서 Z 축으로 제대로 들어올려지지 않게 될 수도 있다.
 |
 |
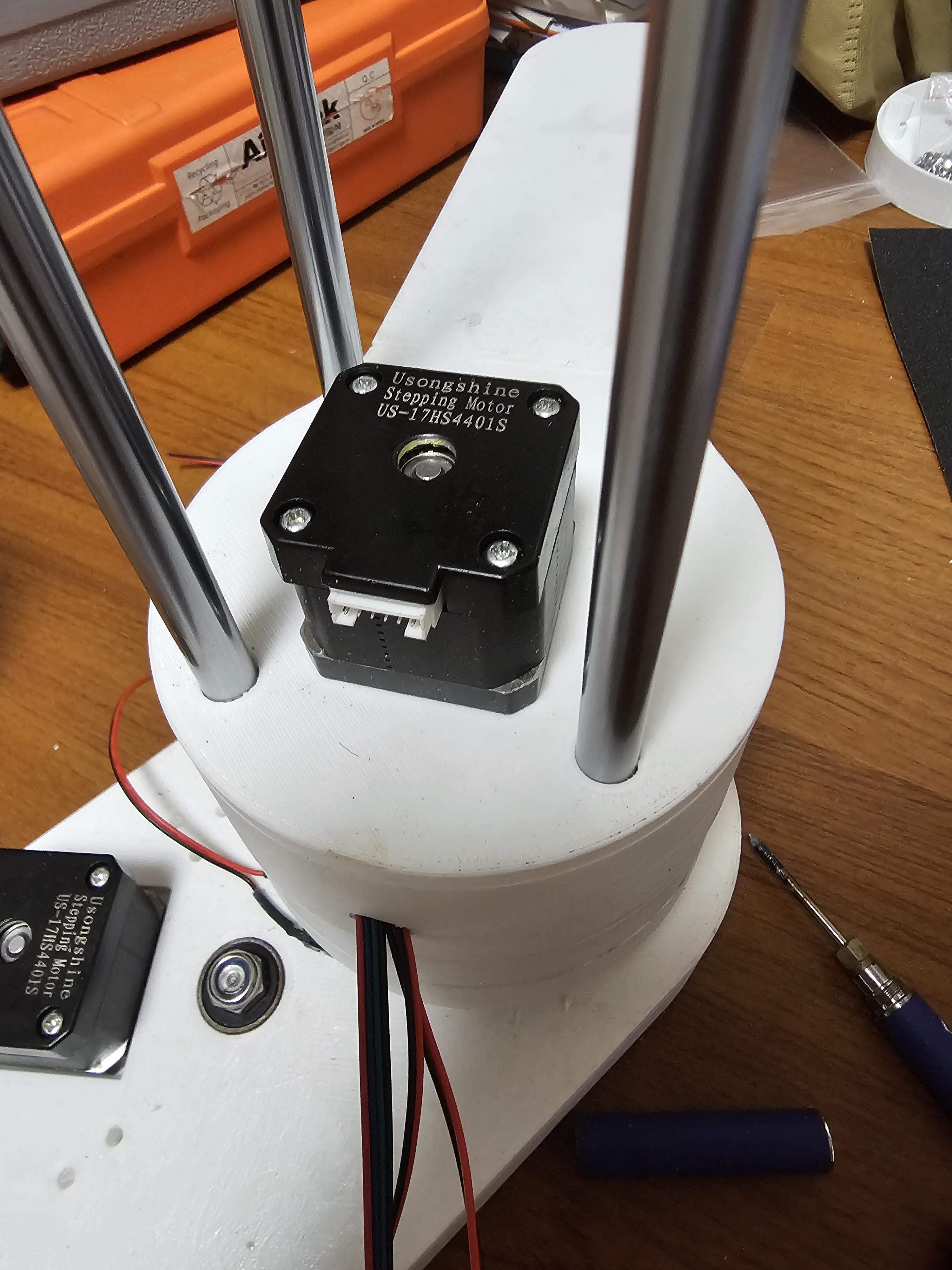
그후엔 팔을 제어할 수 있는 모터를 끼우고 GT2 타이밍 풀리와 8mm 리드 스크류 너트? 를 고정시킨다.
그 후에는 팔을 조립한다..
 |
 |
 |
 |
 |
 |
 |
 |
팔을 조립하는 과정은 따로 안담은게.. 찍어놓은 사진도 딱히 없고 굳이 할 필요는 없을 것 같다.
근데 제일 중요한 것은 이거다.
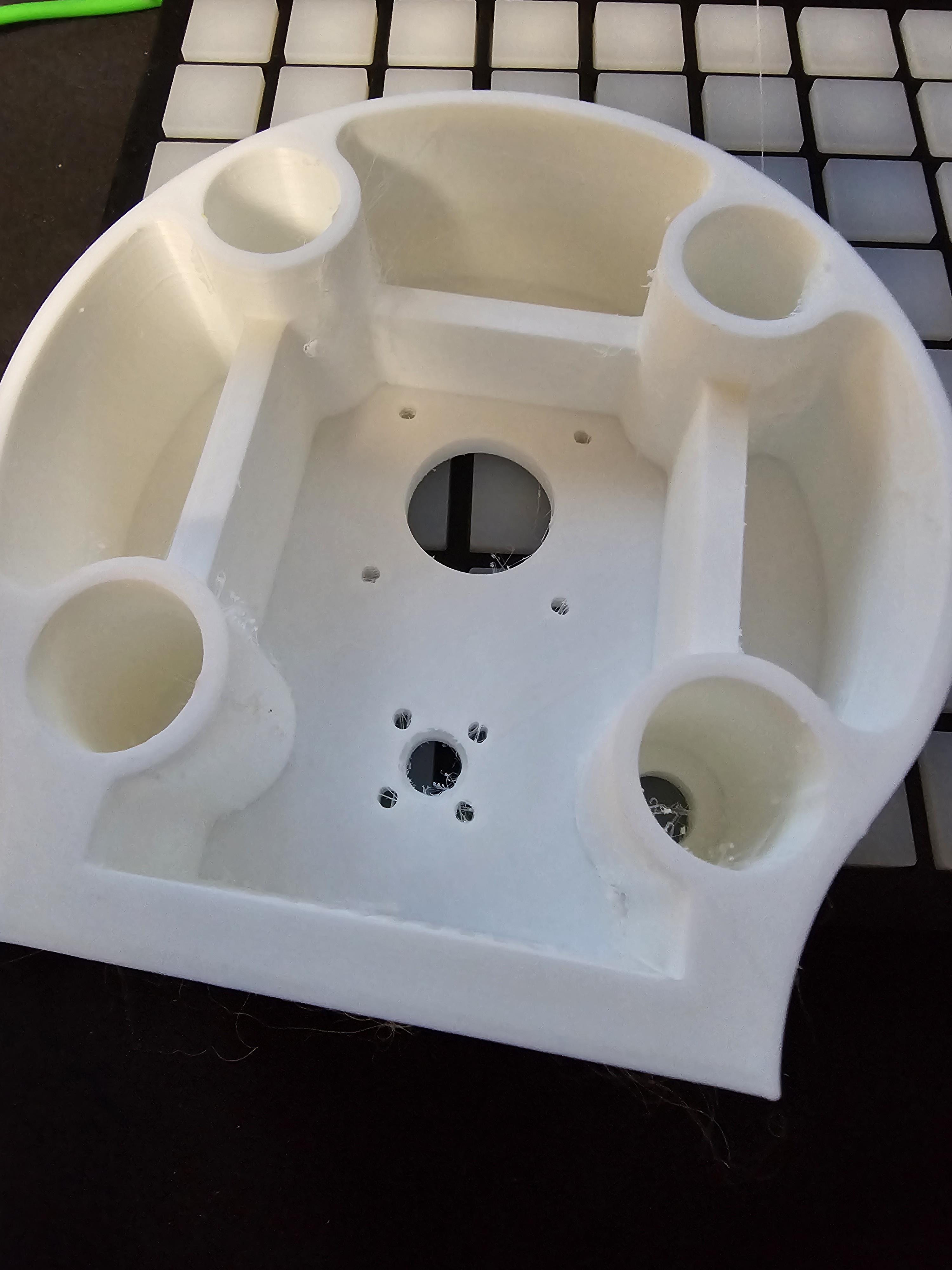
팔의 중심 부분인데. 여기가 가장 중요하다. 만약 여기가 헐렁하게 끼워지면 나중에는 팔이 잘 안돌아가거나 바로 망가질 수 있다. 그래서 최대한 잘 끼워지진 않지만.. 강제로 끼웠다. 만약 이 곳이 헐렁하거나 너무 쉽게 끼워진다면 의심을 해야할 수도 있다..
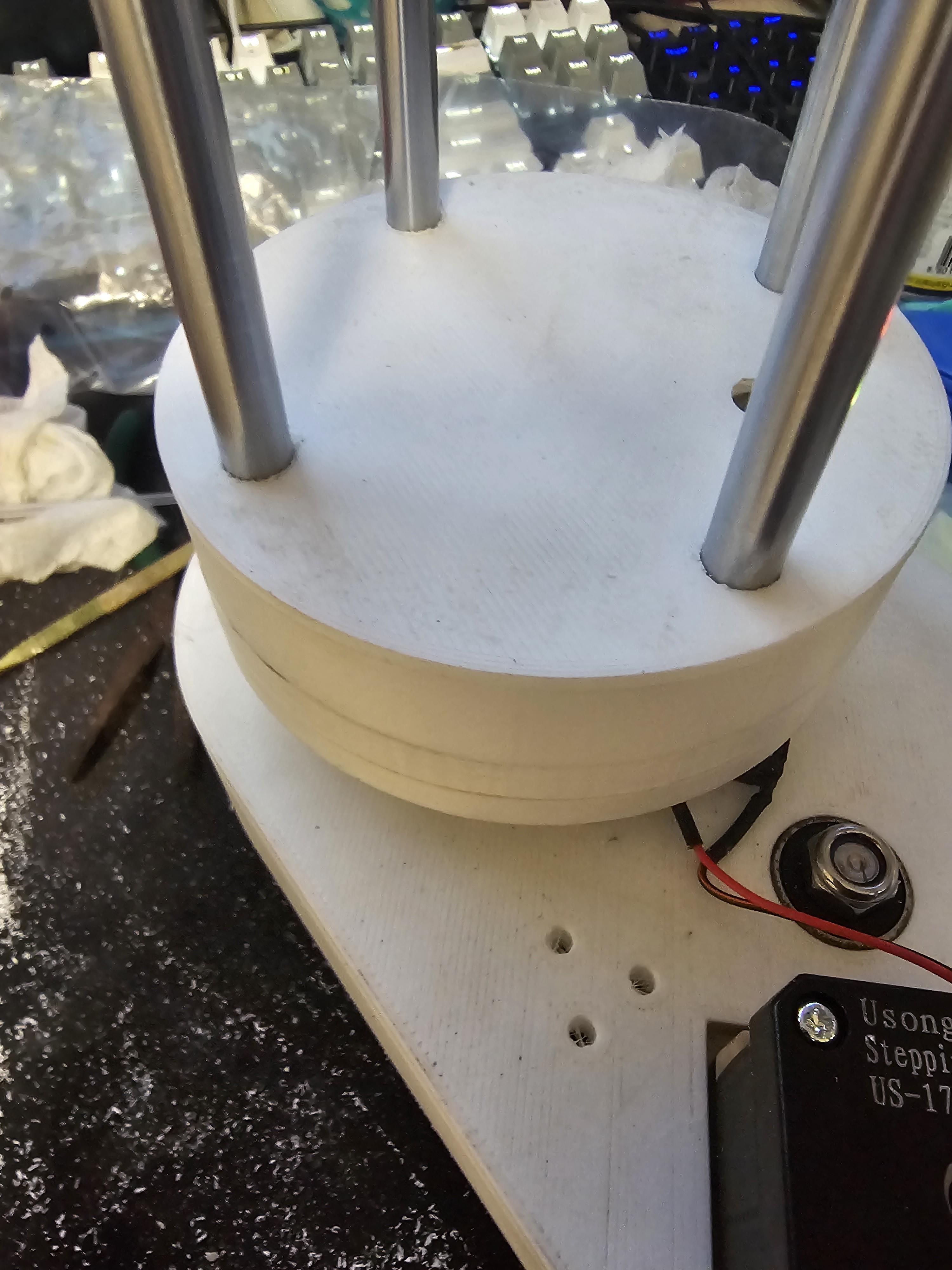
그 후엔 아까 만들었던 하단 부에 잘 맞춰서 아래처럼 끼운다.
솔직히 여기가 좀 많이 까다로웠다.. 선형봉이 수직으로 일자로 뻗어있었다면 좋았겠지만.. 바깥으로 좀 벌려진 상태였다.. 그래서 이걸 최대한 맞춰서 끼워야 해서.. 잘 넣기가 어려웠다.. 심지어 무겁기도 해서..
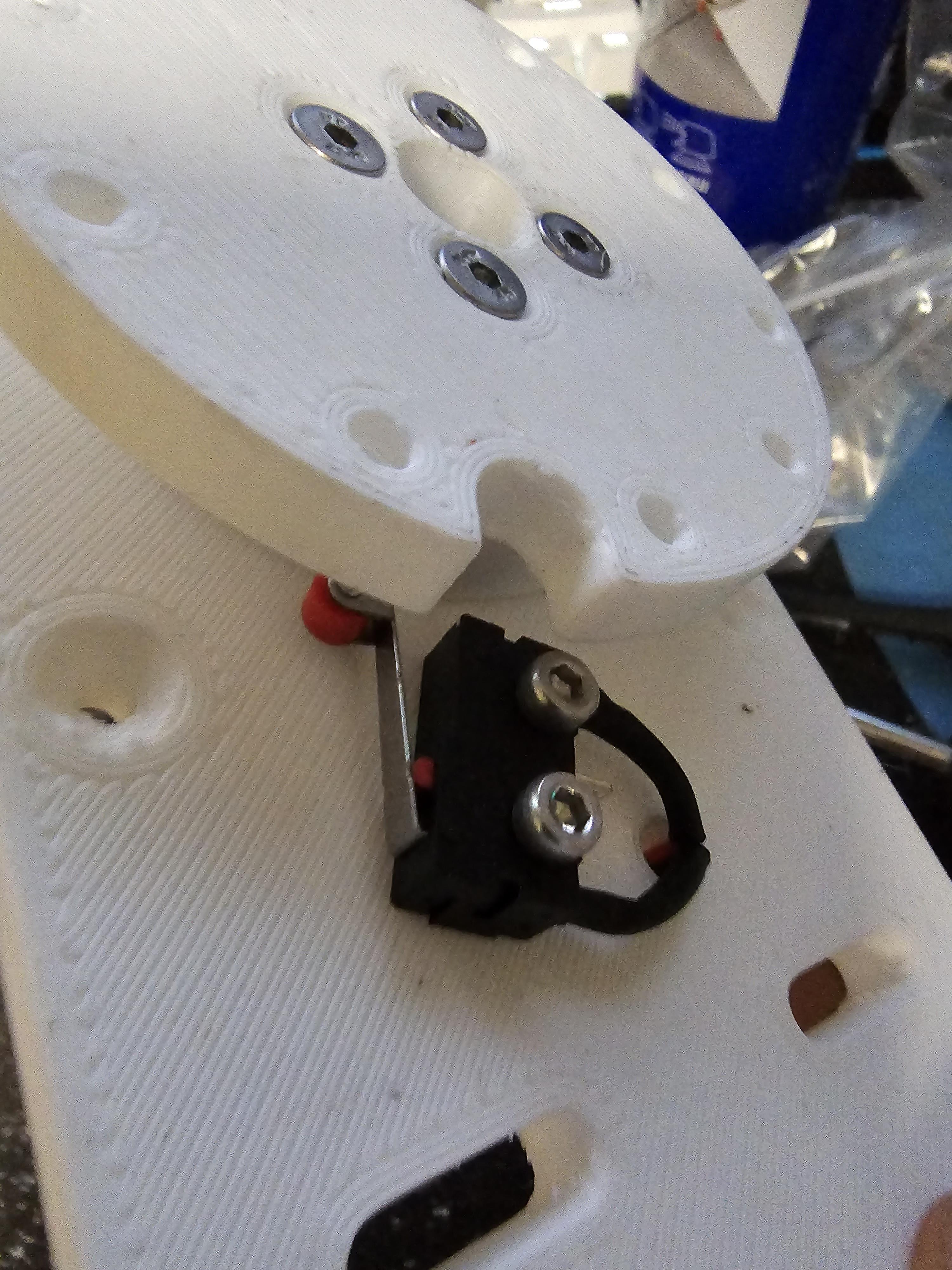
그렇게 끼운 후에는 윗 부분을 조립한다.

윗 부분에도 마찬가지로 리미트 스위치를 끼우고 위쪽을 끼운다. 근데 여기에서 나는 하단부에서는 선형봉을 조이는 부분에 볼트와 너트를 이용해서 조였지만.. 여기에선 조이지 않았다. 충분히 잘 고정되기도 하고 해보니 조여봤자.. 조이지 않은거와 별 차이가 없었다.
 |
 |
 |
 |
 |
 |
 |
 |
그리고.. 다이아몬드 톱으로.. 리드 스크류를 잘랐다.. 이걸 잘른 이유가.. 원래는 영상에서 나오는 것 처럼 28mm인가? 를 잘른거를 사면 됬었는데.. 그냥 되겠지.. 하고 사버려서.. 버릴 수도 없고 해서.. 집에 남아있는 다이아몬드 톱으로 엄청 갈았다.. 진짜 안갈리는걸 강제로 계속 갈아서 결국 1시간만에 다 갈 수 있었다.. 절단면은 좋진 않지만.. 뭔가 뿌듯했다.

그 후엔 리드스크류를 끼우고 커플러도 끼우고 모터도 끼우고 해서 어느정도 완성을 했다.
이후껀 다음 글에서!
'로봇 > Scara' 카테고리의 다른 글
| SCARA 로봇 제작하기 Pt. 6 (제작 - 끝) (0) | 2023.12.11 |
|---|---|
| SCARA 로봇 제작하기 Pt. 5 (제작) (0) | 2023.12.11 |
| SCARA 로봇 제작하기 Pt. 3 (제작) (0) | 2023.11.28 |
| SCARA 로봇 제작하기 Pt. 2 (조사 - 개별적 부품) (0) | 2023.11.26 |
| SCARA 로봇 제작하기 Pt. 1 (조사 - 3D 프린터 부품) (0) | 2023.11.26 |