|
 |
이번엔 9권! 뭔가 사진으로 볼 때 부품이 굉장히 많다..

일단 제일 실망한건.. 개봉을 했을 때 색이 변한 부분이 많다는 것.. 뭐 여기 부품만 흰색이 저것만 있어서 다행이긴 하지만 그래도 슬프긴 하다..
 |
 |
 |
 |
 |
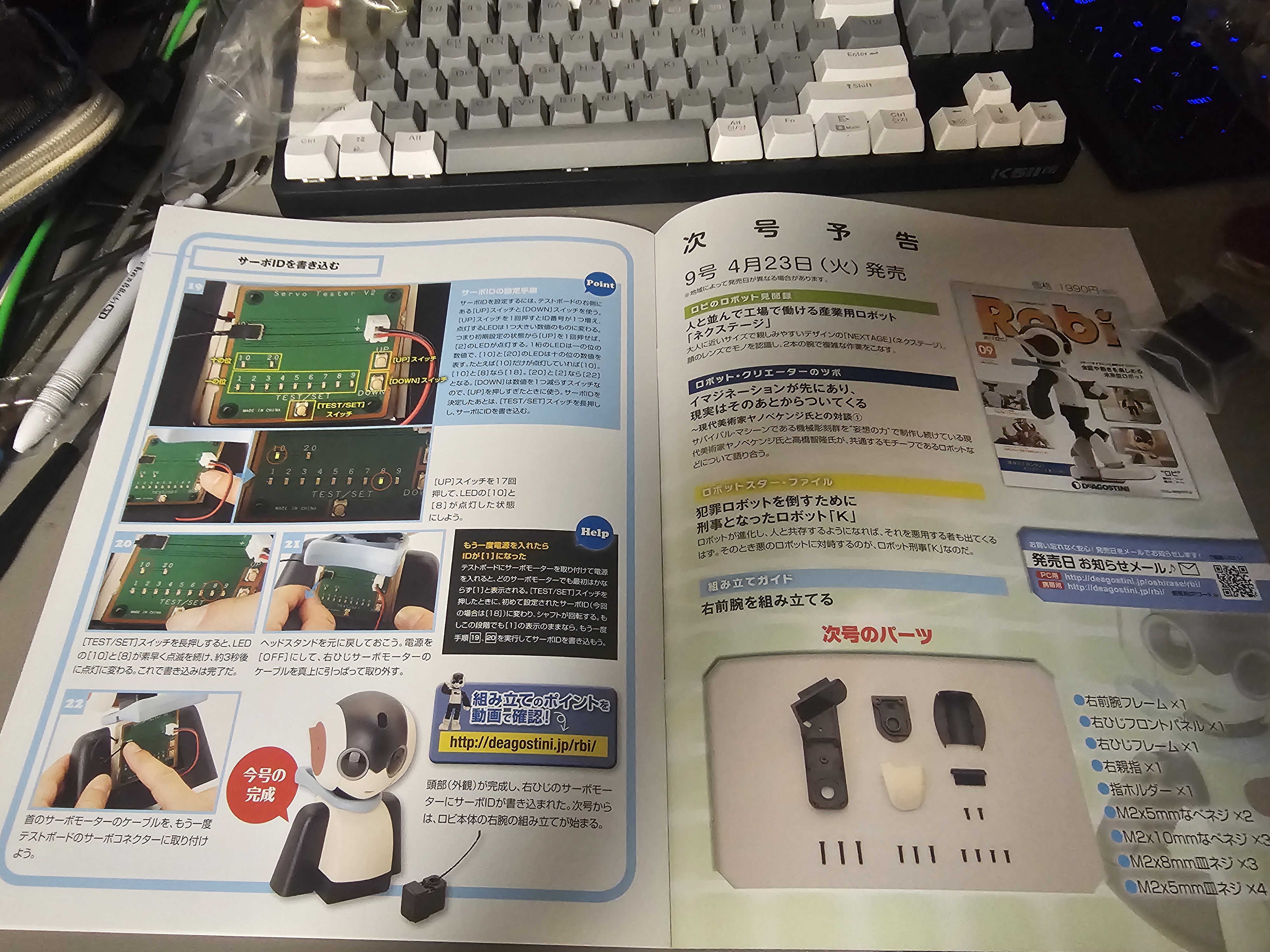
이번 책은 이런식으로 되어있다. 로봇에 대한 소개인 것 같고 뭔가 누군가와 대화한게 있는데.. 로봇에 대한 내용이 별로 없었던 것 같다..
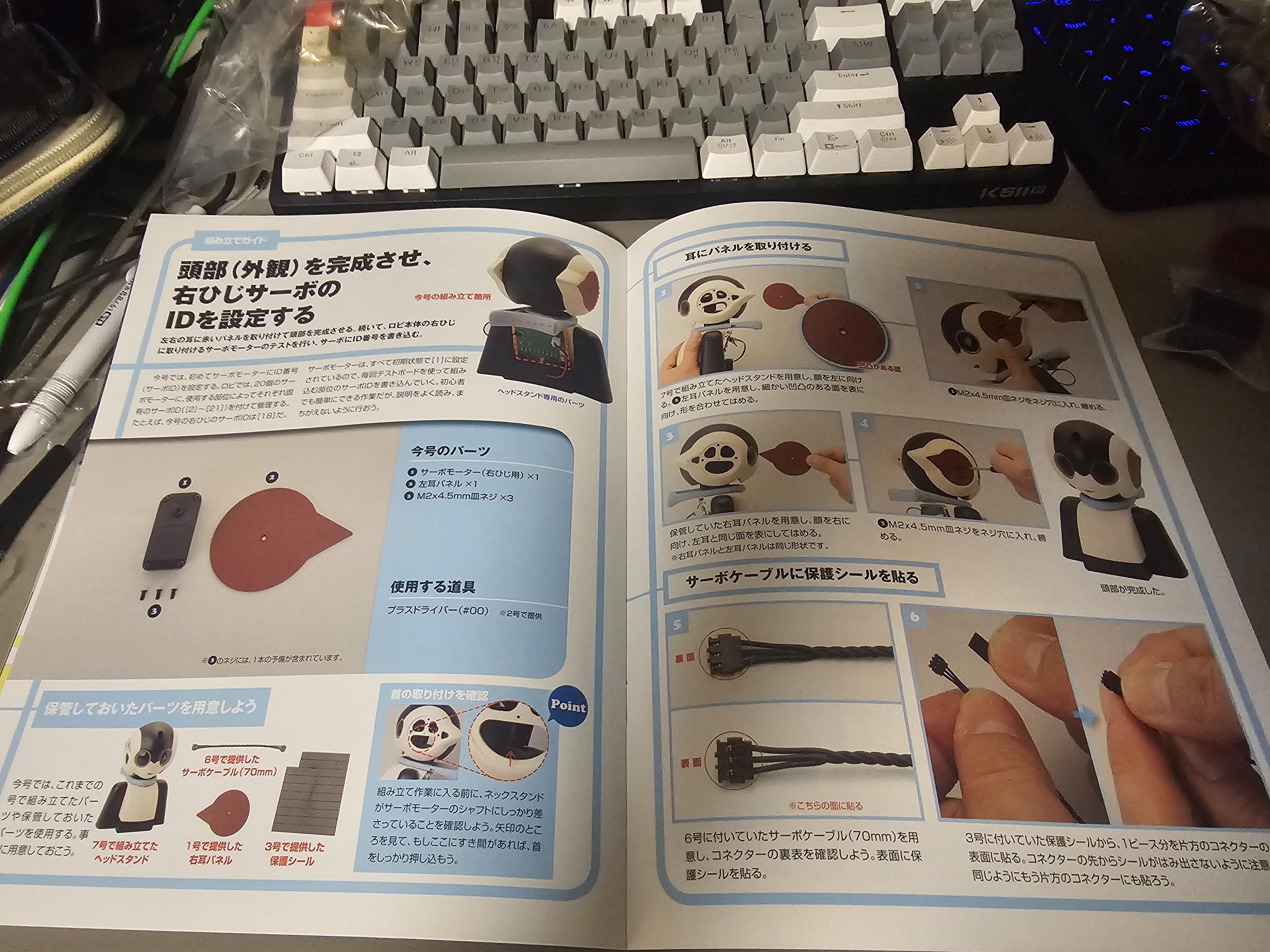
이번 책의 설명은 길지는 않지만 할 것이 꽤 많았다..
 |
 |
일단 부품은 이렇게!
두번째 사진에 보면 나사가 4종류가 있는데 M2로 된 5mm 2개, 10mm 3개, 8mm 3개, 5mm 4개로 되어있다. 5mm가 2 봉지로 있는 것을 보아 단계별로 나사를 모아둔 것 같다. 역시 헷갈리지 않도록 배려한 것이 뭔가 별거 아니면서도 굉장히 좋았다. 버니어 캠퍼스가 없다면.. 헷갈릴 것 같은.. 아무튼
 |
 |
 |
사진 처럼 이상하게 틔어나온 부분을 조립을 해준다. 여기에서 제일 궁금한건 왜 한번에 뽑지 않고 조립으로 저렇게 했는지이다.. 저렇게 튀어나오게 사출이 가능한거였다면 처음부터 튀어나온 부분을 막는 것이 좋을 것 같다고 생각되는데.. 왜 저걸 직접 막도록 설계했는지는 모르겠다.. 도데체 왜지??
 |
 |
이번엔 손쪽 조립인데 그냥 위치 맞춰서 나사를 끼우면 끝난다. 여기에서 설명이 조금 어려웠는데 저 튀어나온 부분이 어떤 식으로 맞는지는 바로 알수도 있긴 하지만 조금 헷갈리기도 했다.. 심지어 촬영 때문에 한손으로 들어야 하는데 그것도 어려웠고.. 저거를 그대로 들고 맞추는게 쉽지는 않았다.
 |
 |
 |
그리고 모터 조립인데. 이 모터는 이전 권에서 케이블만 끼웠던 것이다. 전 권에서 말했던 것 처럼 뒷판을 왜 안바꾸나 했었는데 여기에서 바꾸게 된다. 끼워줬던 뒷판을 빼고 저 부분으로 바꿔서 끼운 후에, 워터보드 같이 생긴거를 모터에 맞춰서 끼운다. 모터에는 한쪽 부분이 평평하게 되어있어서 딱 맞춰서 끼우기가 좋다.
잘 안들어가기는 하는데 꽉 끼우면 세번째 사진처럼 끼워진다.
 |
 |
 |
이거는 팔꿈치 부분 관절 조립인 것 같은데. 그냥 부품을 맞춰서 조립하면 된다. 딱히 어려운건 없어서 패스!
 |
 |
첫번째 사진에 있는 것 처럼 저 2개의 구멍을 맞춰서 조립을 해준다. 이렇게 조립한 후에 2번째 사진의 아래쪽에도 나사를 끼우는게 있는데.. 여기에서 문제가 생겼다..
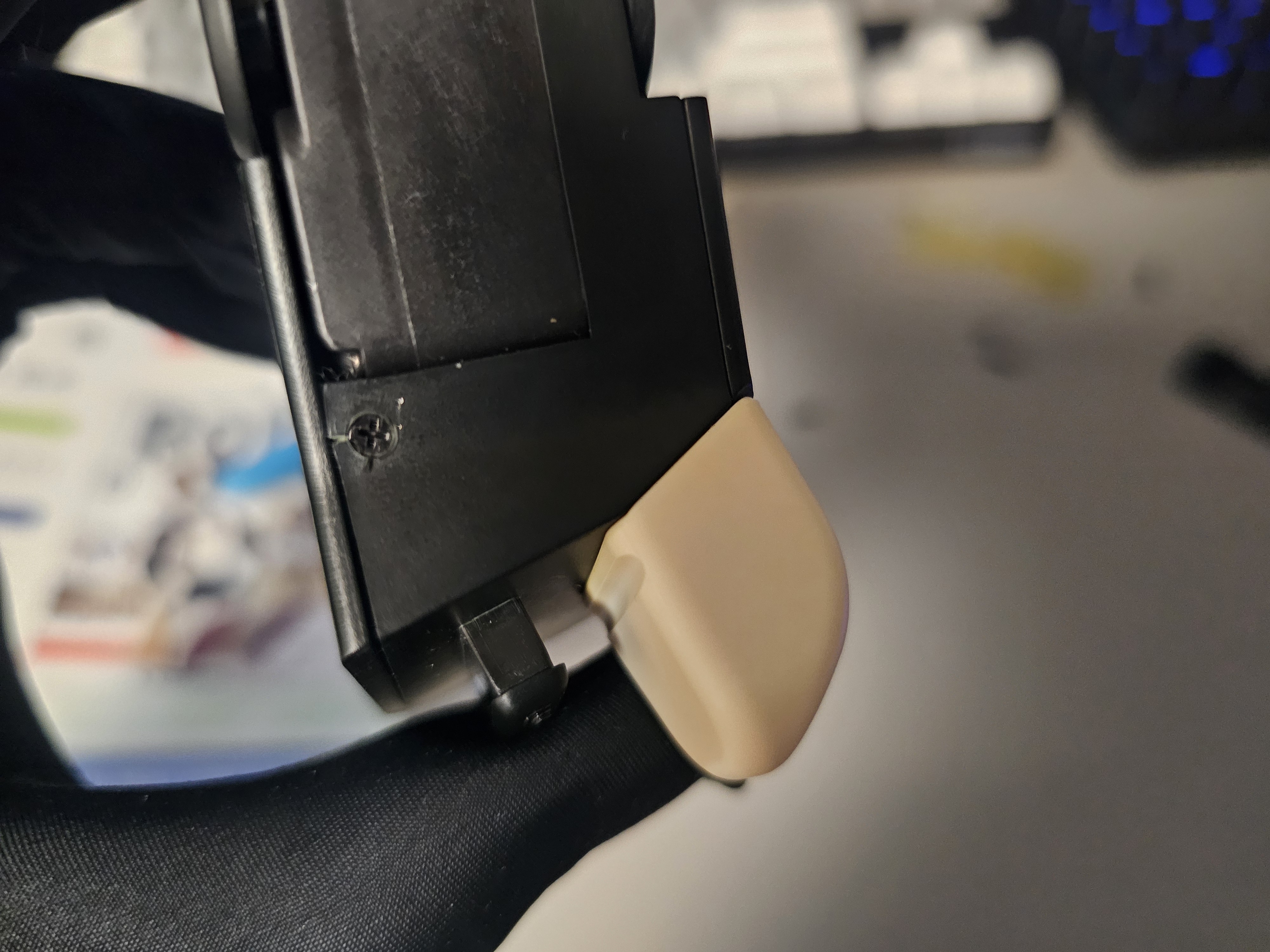
이런식으로.. 되버렸다.. 딱히 소리도 들리지도 않았고 너무 오래 되다보니.. 그냥 딱히 쎄게 힘을 안들이고 나사를 조이고 있었는데 저런식으로 박살났다.. 뭐 일단 여기에서 더 조이면 더 박살날테니깐 그냥 조금만 풀고 여기에서는 끝냈다..
슬프긴 한데.. 뭐 어쩔 수 없긴 하다.. 10년이나 지난거니깐..
아무튼 이렇게해서 9권도 조립이 끝났다!
마지막 부분 조립이.. 실망스럽긴 한데.. 뭐 어쩔 수 없긴 하다.. 반대쪽 조립에선 더 조심해야지 뭐..
일단 이렇게 9권은 끝!
'로봇 > ROBI' 카테고리의 다른 글
| Robi 로봇 제작 - 11권 (팔 조립) (0) | 2024.07.11 |
|---|---|
| Robi 로봇 제작 - 10권 (팔 조립) (0) | 2024.07.11 |
| Robi 로봇 제작 - 8권 (귀 덮개, 모터 케이블 조립) (0) | 2024.07.10 |
| Robi 로봇 제작 - 7권 (귀 조립) (0) | 2024.07.10 |
| Robi 로봇 제작 - 6권 (모터 테스트) (0) | 2024.07.03 |