|
 |
이번엔 14권이다!
이전 권을 쓴 날이.. 차이가 좀 많이 나는데.. 이유가 대학교의 학생 연구원 때문에.. 하는 일이 너무 많아져서.. 쓸 수가 없었다..
일단 이번 책 내용은!
 |
 |
 |
 |
 |
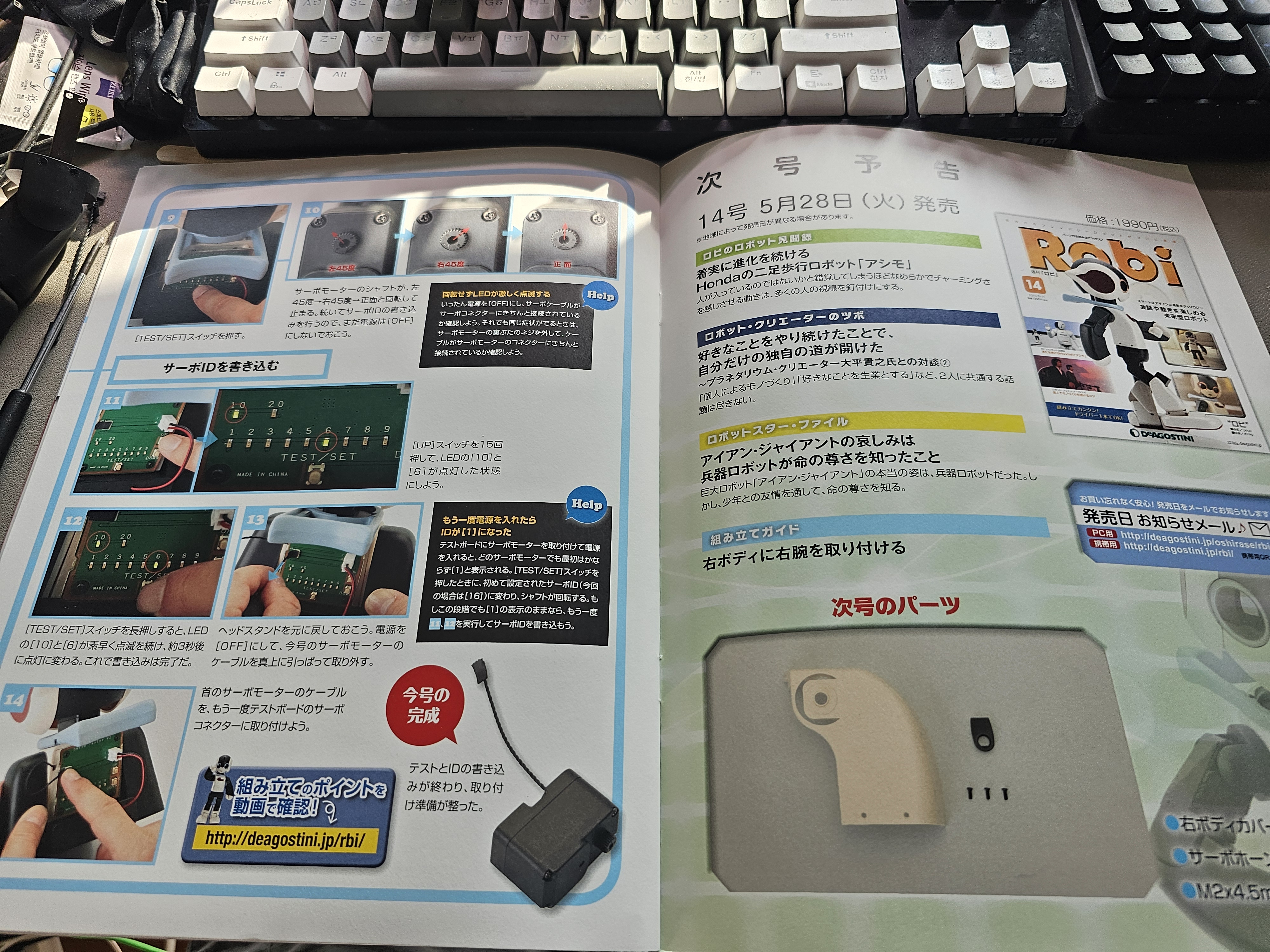
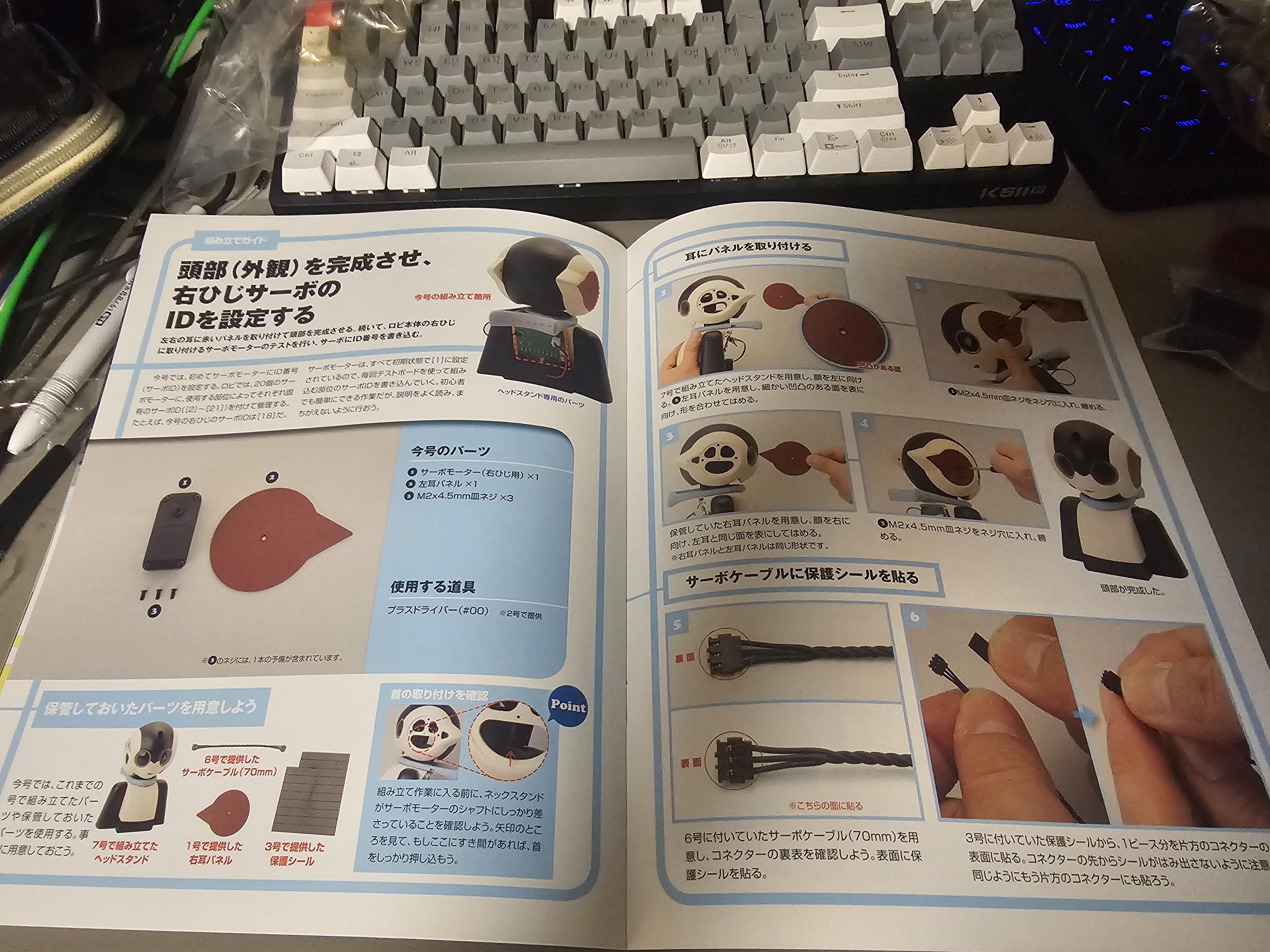
이번 책 내용에는 아시모에 대한 내용이 있다!!
내가 어릴 적에 TV에서 오준호 교수님의 휴보 로봇을 소개하는 걸 봤었다. 그곳에서는 아시모가 계단을 올라가고 내려가는 모습이 보였던 것으로 기억한다.
나는 그 때는 아주 어렸을 때인데 그 방송을 처음으로 휴보를 알게 되고 오준호 교수님도 나왔었는데 아직까지도 기억하고 있는 나를 보니 굉장히 관심이 많았었던 것 같다.
그리고 이 글을 쓰면서 휴보와 아시모의 예전 동영상을 보고 있는데 뭔가 현재의 발표된 많은 로봇들 보다도 자연스럽고 부드럽게 작동하는 것 같다!
그리고 어릴 때 들었던 것 중에 하나 생각난게 있는데, 도데체 왜 작은 로봇을 그대로 크게 만들면 안될까라는 생각을 했었다. 작은 로봇도 잘 움직이는데 이걸 그대로 크게 만들어도 상관없지 않을까? 라는
그리고 이걸 로봇 선생님에게 물어봤을 때 돌아온 답변은 확실하지는 않은 답변이였지만 로봇의 모터나 프레임 이런게 관련되어서 각각 파츠의 무게나 모터 회전 뭐 이런 것 때문에 바로 똑같이 크게 만드는건 어렵다고 들었었다.
지금도 왜 안되는진 정확하게 모르긴 한다.. 왜냐하면 어릴 때 퍼비를 판매했었을 때 행사에서 엄청 큰 퍼비를 만든 것을 봤던 적이 있어서.. 아직은 잘 모르겠다.
두번째 사진은 그냥 천체 상영에 대한 것 같은데 그냥 특이해보여서 넣은 것이다.
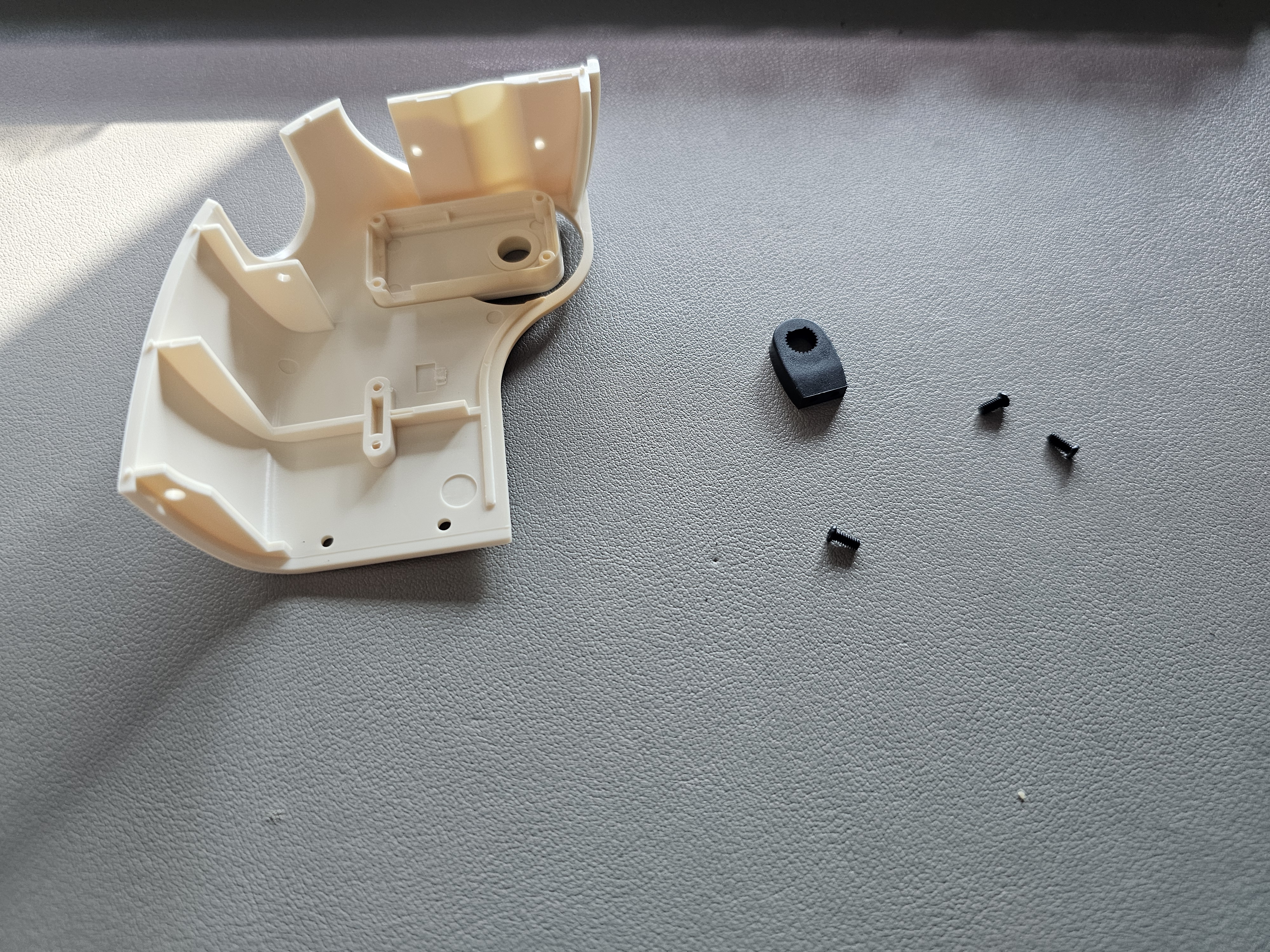
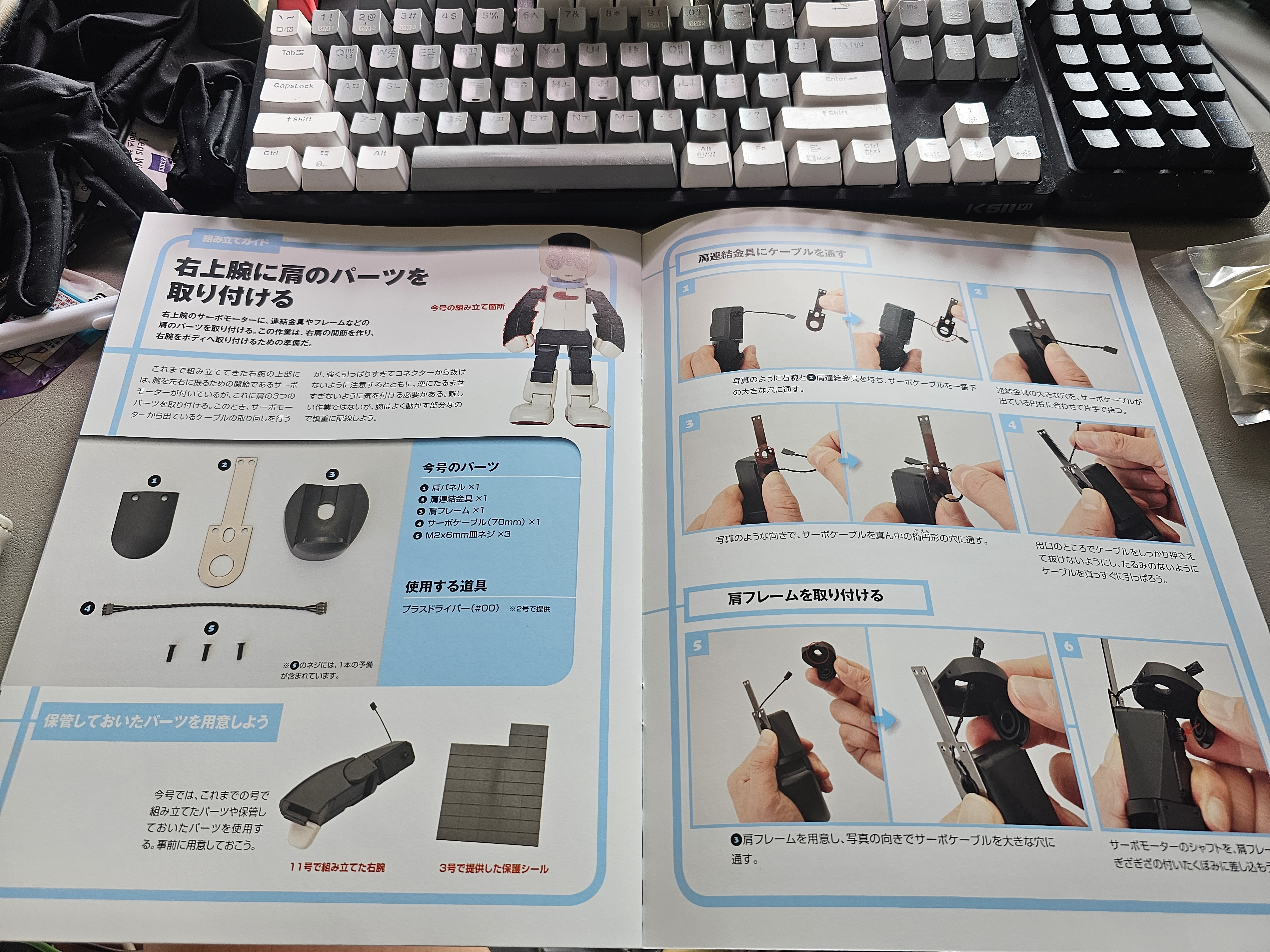
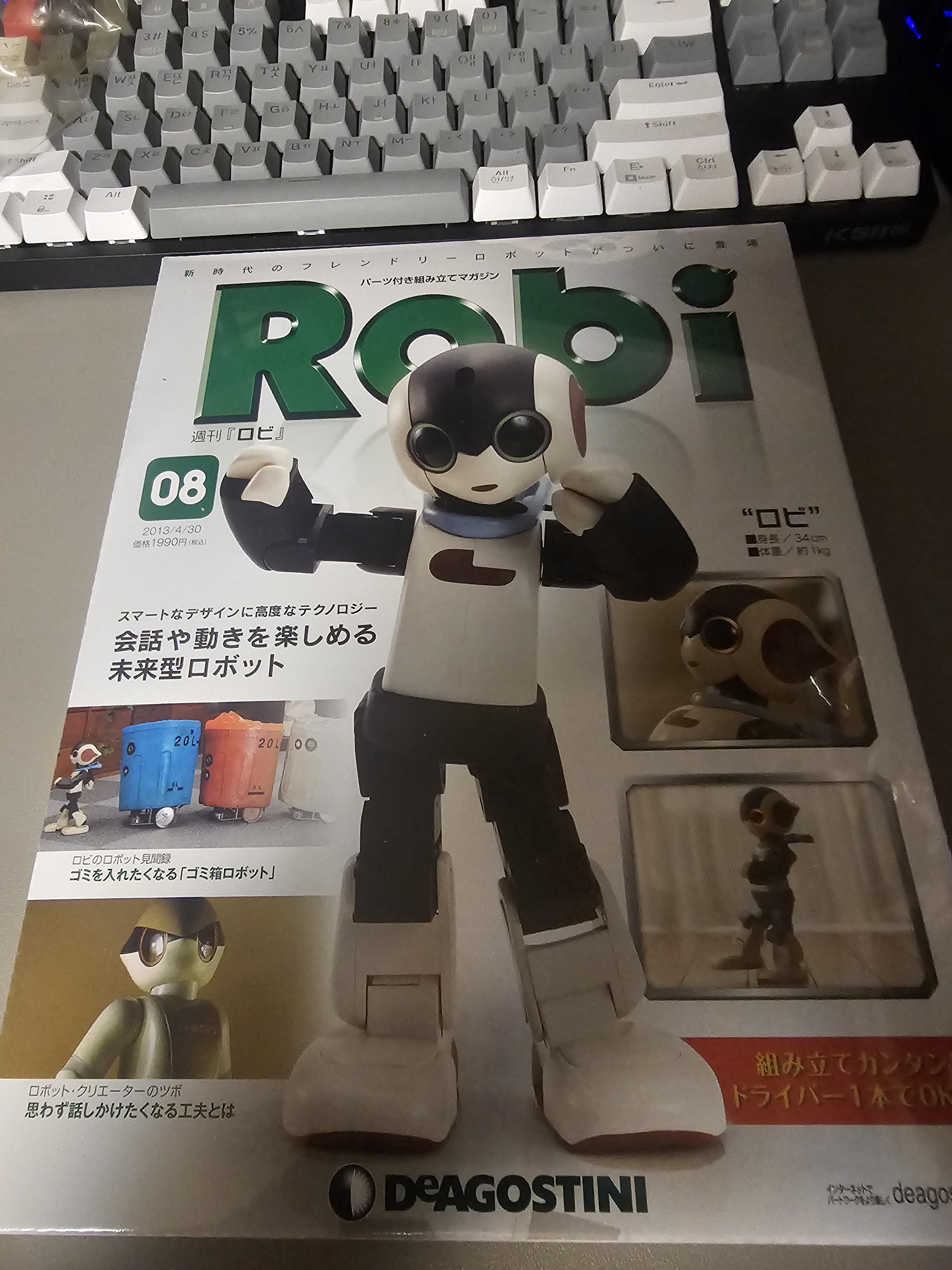
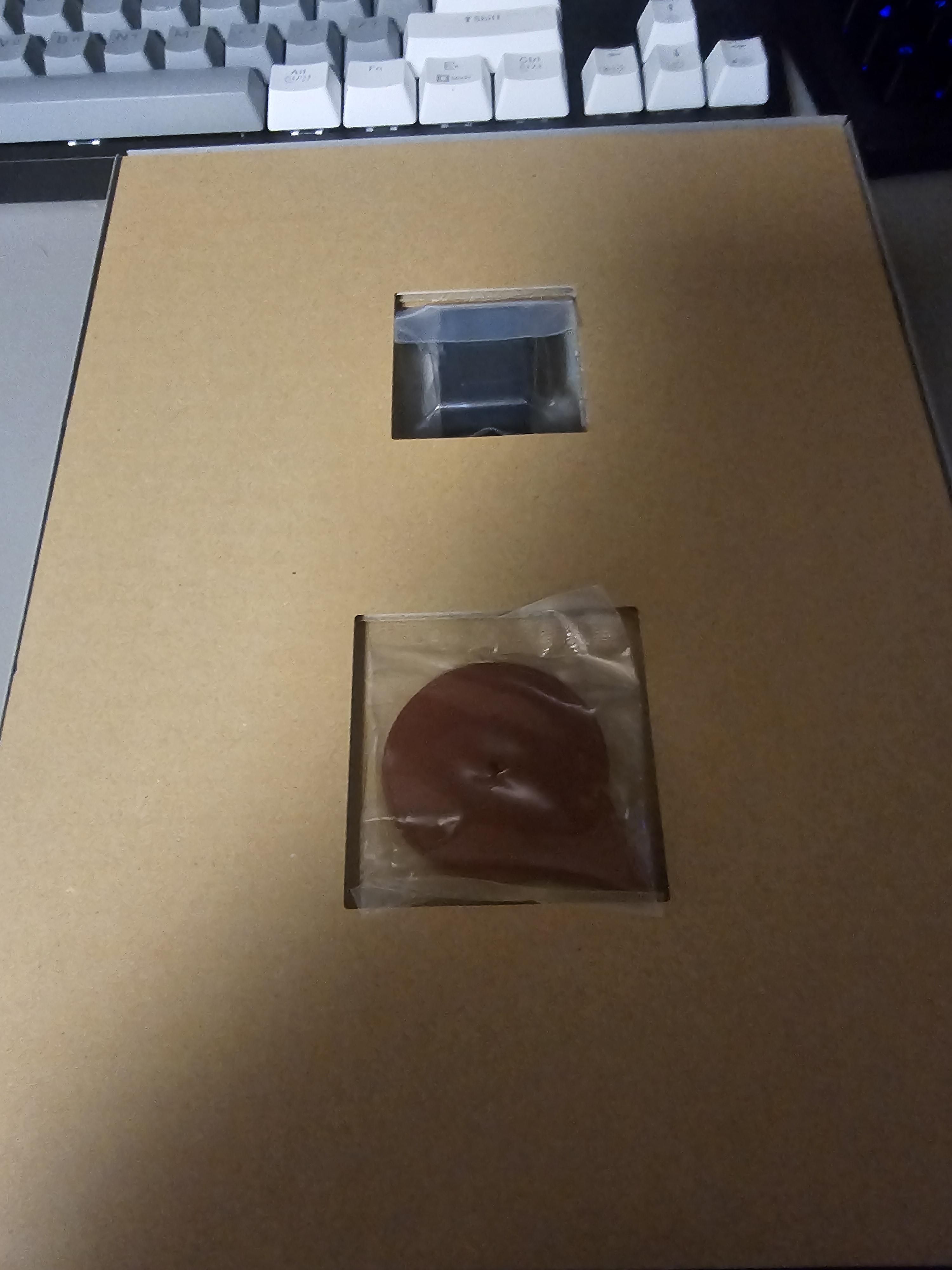
이번 구성은 이렇다!
부품은 별로 없어서 어렵지는 않지만 쉽지도 않은 것!
 |
 |
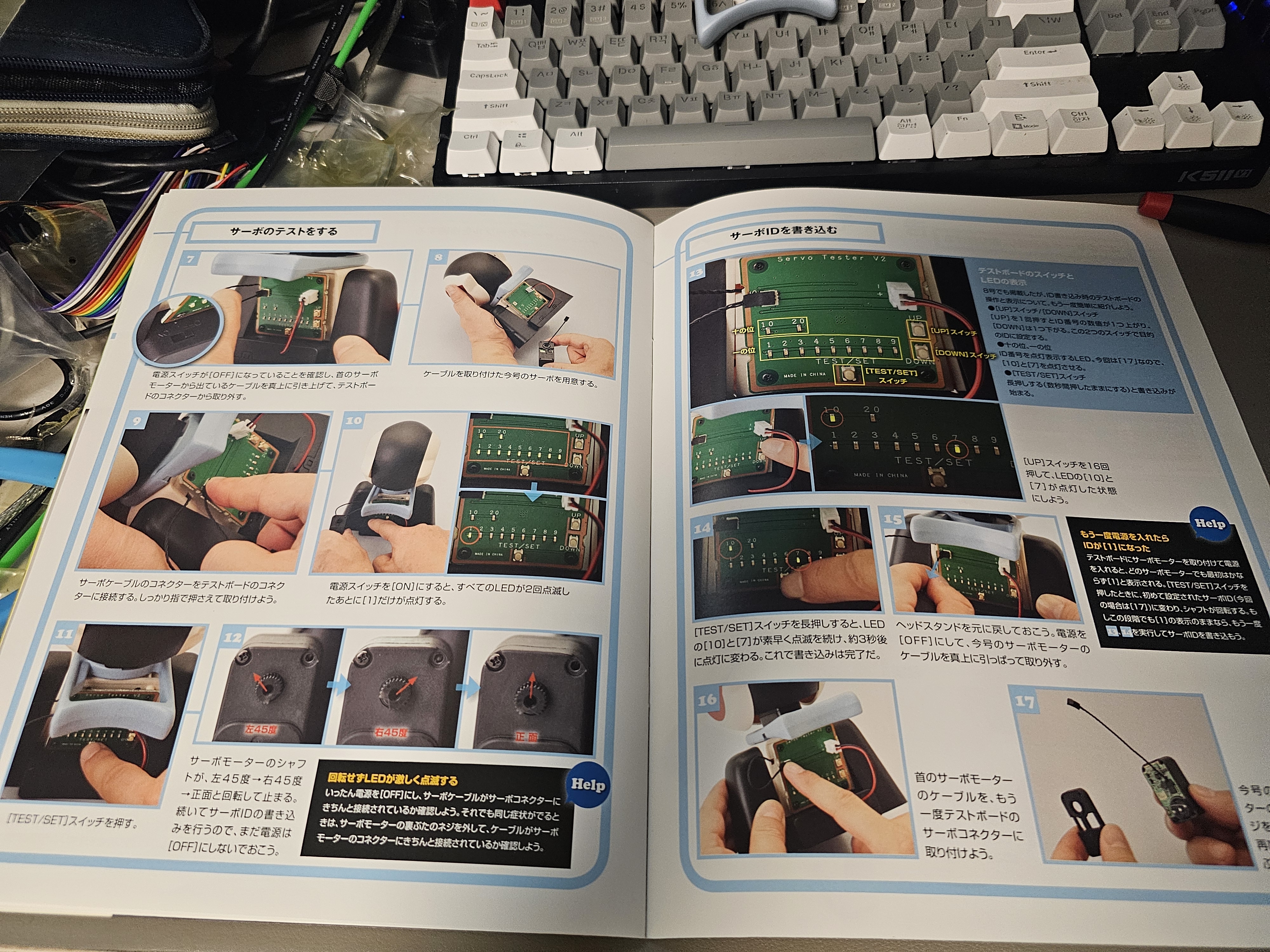
일단 어깨 부분을 90도로 돌린다. 그리고 부품에 끼운다!
 |
 |
 |
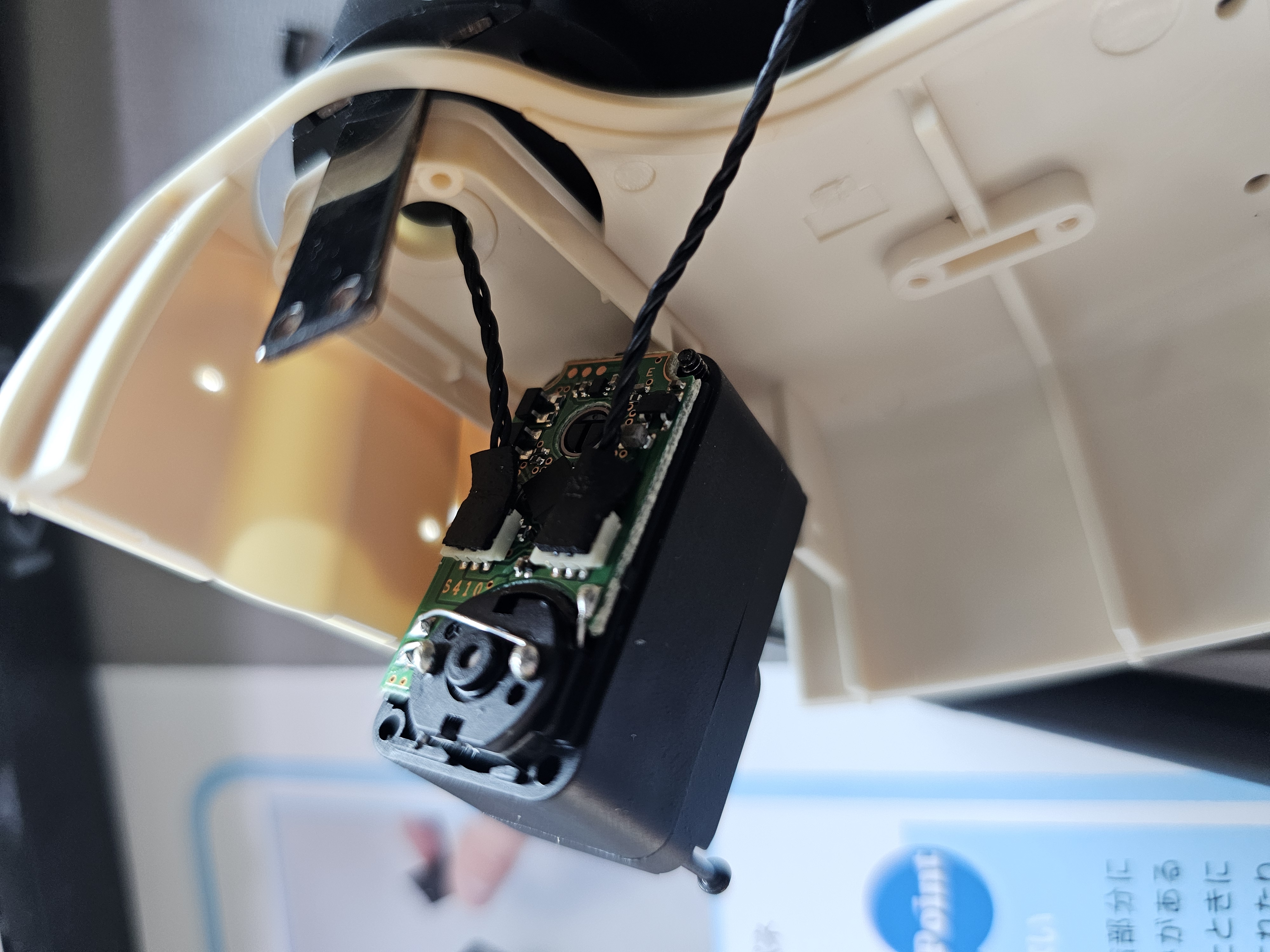
이전 권에서 선을 끼웠던 모터에 파츠를 끼워주고 2번째 사진 처럼 다른 선을 끼우고 장착한다!

이렇게 아까전 모터에 붙힌 파츠와 쇠 부분을 붙여준다.
나는 왜 갑자기 쇠 부분이 들어가는지 몰랐는데 알고보니 어깨를 앞뒤로 움직일 수 있도록 회전시키는 방식인 것 같다. 왜 이렇게 한건지는 잘 모르겠다.
 |
 |
 |
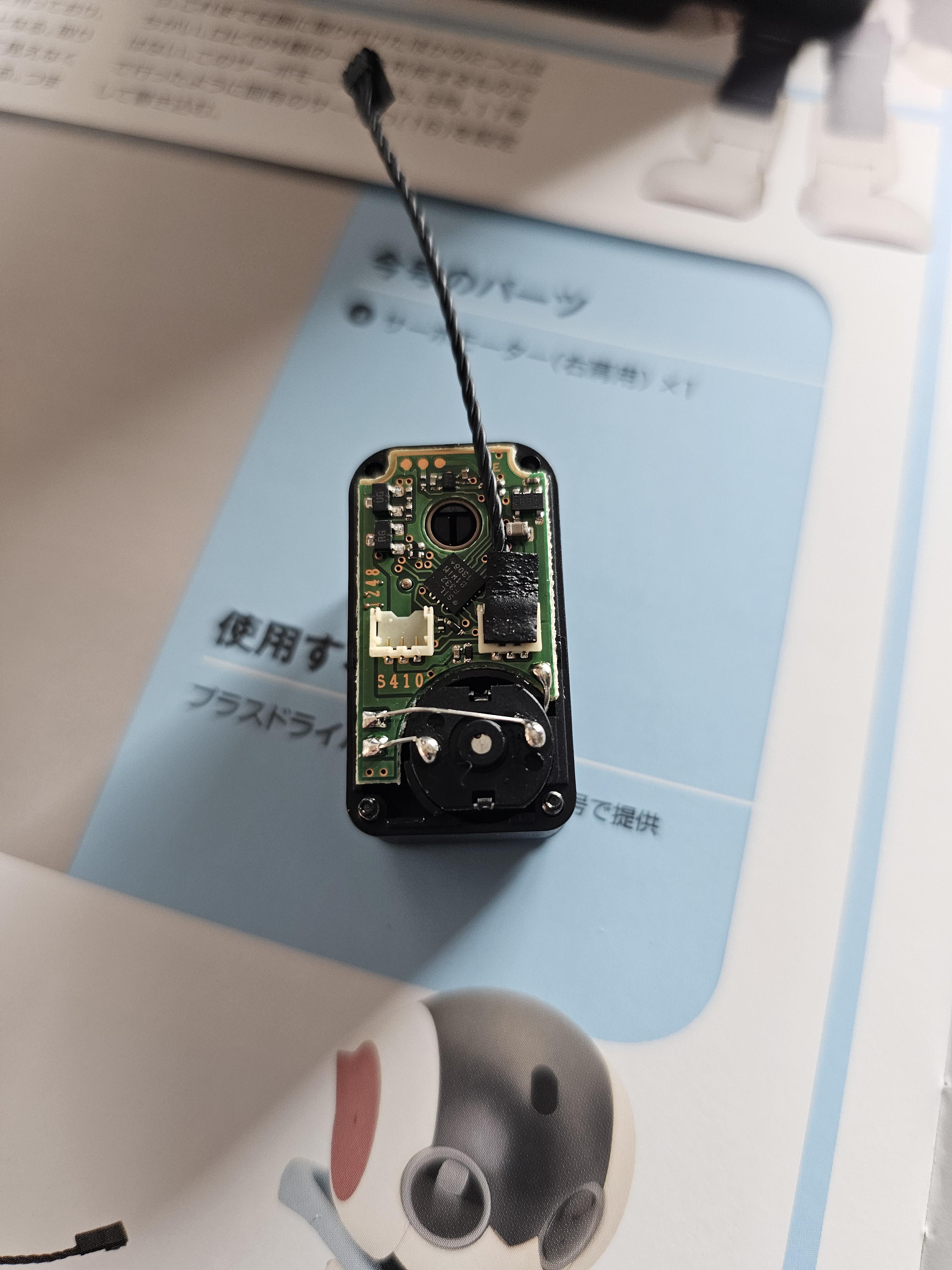
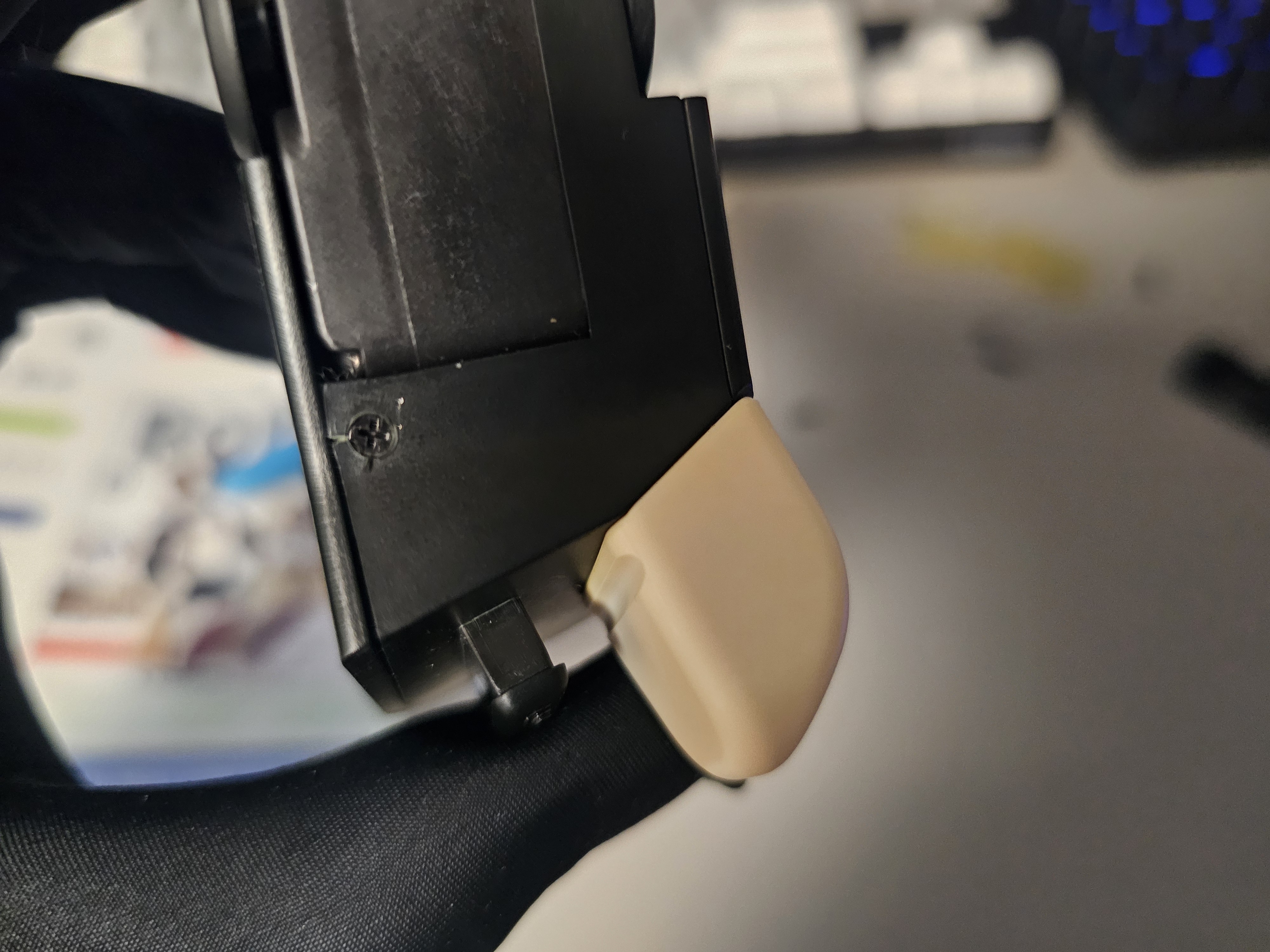
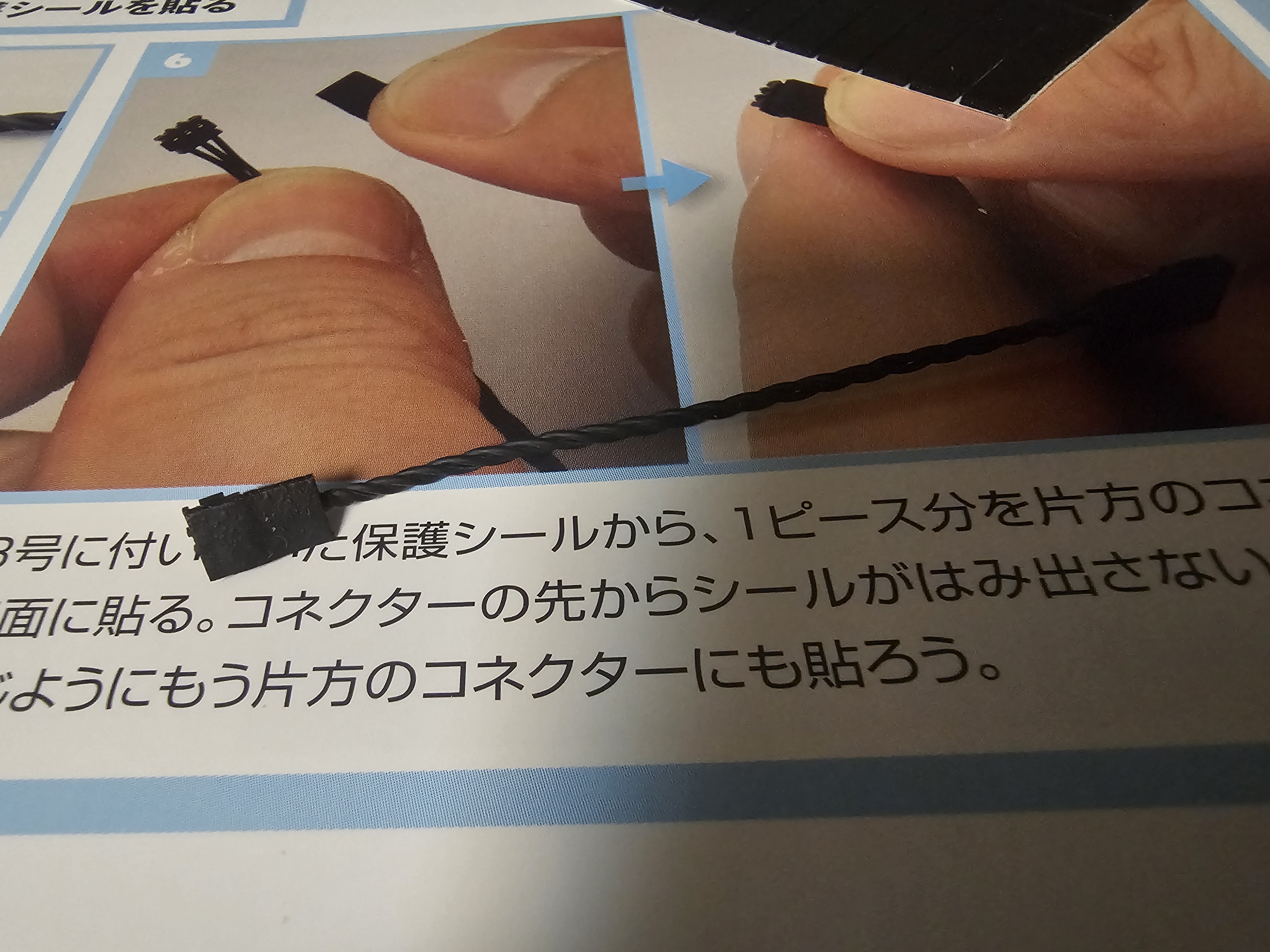
그리고 모터를 연결했던 선이 안에서 꼬이거나 복잡할 수 있으니 붙어있던 캡을 떼고 2번째 사진 처럼 선을 약간 빼둔다.
그 후에는 다시 캡을 씌워서 고정시킨다!
 |
 |
그렇게 되면 이런식으로 모터를 돌릴 수 있게 된다. 도데체 왜 이렇게 한건지는 책을 자세히 안봐서 모르겠지만.. 뭔가 움직이는 힘과도 관련되어있는 느낌이 든다..
뭐 아무튼 이걸로 14권도 끝!
'로봇 > ROBI' 카테고리의 다른 글
| Robi 로봇 제작 - 16권 (반대 팔 조립) (0) | 2024.08.14 |
|---|---|
| Robi 로봇 제작 - 15권 (반대 팔 조립) (0) | 2024.08.12 |
| Robi 로봇 제작 - 13권 (팔 조립) (0) | 2024.07.27 |
| Robi 로봇 제작 - 12권 (팔 조립) (0) | 2024.07.27 |
| Robi 로봇 제작 - 11권 (팔 조립) (0) | 2024.07.11 |